一种设备台车的制作方法
本技术涉及高端医疗装备领域,尤其涉及一种用于手术机器人的设备台车。
背景技术:
1、随着机器人技术的发展,机器人辅助手术诊断、治疗越来越广泛地应用于医疗实践。手术中,需要将手术机器人定位于手术床上,手术后,再将手术机器人撤离手术床,搬离并放置于固定位置;下次手术时,再将手术机器人搬至手术床旁。这样就需要一种用于手术机器人的设备台车。
技术实现思路
1、基于此,本实用新型提供一种新型的设备台车。
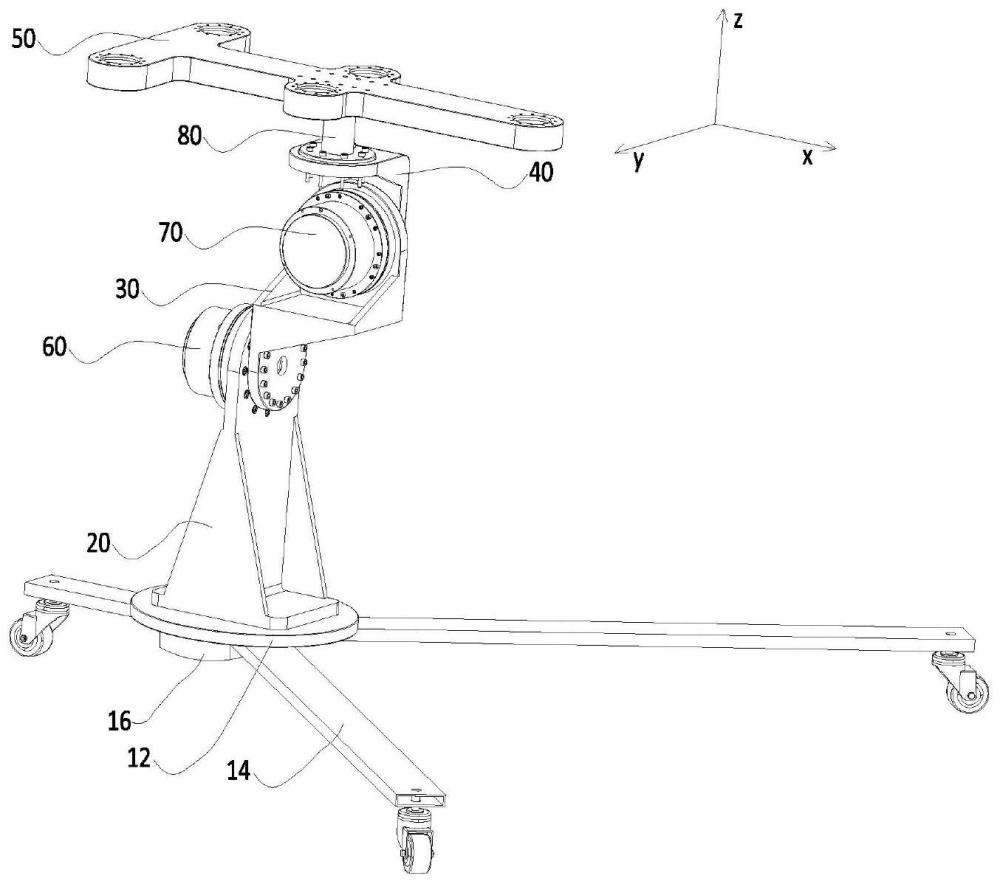
2、一种设备台车,其包括底座、固定于底座的第一支臂、与第一支臂连接的第二支臂、与第二支臂连接的第三支臂和连接于第三支臂的固定架,在所述底座所在的平面建立xoy坐标平面,所述第一支臂垂直于xoy坐标平面设置,其所在的轴为z轴,所述第二支臂相对于所述第一支臂绕x轴转动,所述第三支臂相对于所述第二支臂绕y轴转动。
3、进一步地,所述第二支臂与所述第一支臂之间设置旋转关节。
4、进一步地,所述第三支臂与所述第二支臂之间设置旋转关节。
5、进一步地,所述固定架与所述第三支臂之间设置让所述固定架相对于所述第三支臂绕z轴转动的旋转关节。
6、进一步地,所述设备台车还包括可让至少一旋转关节由锁死状态释放的控制开关。
7、进一步地,所述第一支臂、第二支臂、第三支臂或固定架上设置限位结构。
8、进一步地,所述限位结构为正反双向型限位结构。
9、进一步地,所述固定架的高度为可调型。
10、进一步地,所述第一支臂与所述底座之间设置可让所述第一支臂升高或降低的升降机构。
11、进一步地,所述固定架通过固定轴可绕z轴转动地或不可转动地安装于所述第三支臂。
12、综上所述,术者可以利用设备台车方便地搬运安装于固定架上的手术机器人,并稳固地定位于手术床上,而通过调节第二支臂和第三支臂转动,方便手术前和/或手术中的手术机器人的位置调节。
技术特征:
1.一种设备台车,其特征在于,所述设备台车包括底座、固定于底座的第一支臂、与第一支臂连接的第二支臂、与第二支臂连接的第三支臂和连接于第三支臂的固定架,在所述底座所在的平面建立xoy坐标平面,所述第一支臂垂直于xoy坐标平面设置,其所在的轴为z轴,所述第二支臂相对于所述第一支臂绕x轴转动,所述第三支臂相对于所述第二支臂绕y轴转动。
2.如权利要求1所述的一种设备台车,其特征在于:所述第二支臂与所述第一支臂之间设置旋转关节。
3.如权利要求1所述的一种设备台车,其特征在于:所述第三支臂与所述第二支臂之间设置旋转关节。
4.如权利要求1所述的一种设备台车,其特征在于:所述固定架与所述第三支臂之间设置让所述固定架相对于所述第三支臂绕z轴转动的旋转关节。
5.如权利要求1所述的一种设备台车,其特征在于:所述设备台车还包括可让至少一旋转关节由锁死状态释放的控制开关。
6.如权利要求1所述的一种设备台车,其特征在于:所述第一支臂、第二支臂、第三支臂或固定架上设置限位结构。
7.如权利要求6所述的一种设备台车,其特征在于:所述限位结构为正反双向型限位结构。
8.如权利要求1所述的一种设备台车,其特征在于:所述固定架的高度为可调型。
9.如权利要求1所述的一种设备台车,其特征在于:所述第一支臂与所述底座之间设置可让所述第一支臂升高或降低的升降机构。
10.如权利要求1所述的一种设备台车,其特征在于:所述固定架通过固定轴可绕z轴转动地或不可转动地安装于所述第三支臂。
技术总结
一种设备台车,其包括底座、固定于底座的第一支臂、与第一支臂连接的第二支臂、与第二支臂连接的第三支臂和连接于第三支臂的固定架,在所述底座所在的平面建立xoz坐标平面,所述第一支臂垂直于xoz坐标平面设置,其所在的轴为y轴,所述第二支臂相对于所述第一支臂绕x轴转动,所述第三支臂相对于所述第二支臂绕z轴转动。让术者可以方便地搬运手术机器人,并稳固地定位于手术床上,方便调节安装于固定架上的手术机器人的位置。
技术研发人员:请求不公布姓名,曹云飞,安麟簇·辛
受保护的技术使用者:深圳市通甪科技有限公司
技术研发日:20230221
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!