一种外骨骼机器人足底触地信号检测设备
本技术涉及一种足底触地信号检测设备,具体涉及一种外骨骼机器人足底触地信号检测设备。
背景技术:
1、在外骨骼机器人研发中,步态辨识是外骨骼控制中的一个关键操作。而在步态辨识中,需要事先在同一个时间窗中采集人体足底压力信号和足底触地信号,作为步态辨识学习的数据基础。目前,采集信号方式基本通过在原本鞋上面在做一个检测鞋的方式,即双层鞋方式,这样使用起来不仅使成本大幅增加,而且双层鞋结构也降低了穿戴者的舒适度,从而导致人体行走方式变形。另一方面橡胶鞋底触点设计复杂难以保证稳定性,这两点对其测量准确度影响都比较大。所以实现的成本、舒适度以及精度三方面问题成为了目前足底触地检测设备关键技术问题。
技术实现思路
1、本实用新型为克服现有技术不足,进而提供一种外骨骼机器人足底触地信号检测设备。该设备适应性好,结构简单稳定,检测准确可靠。
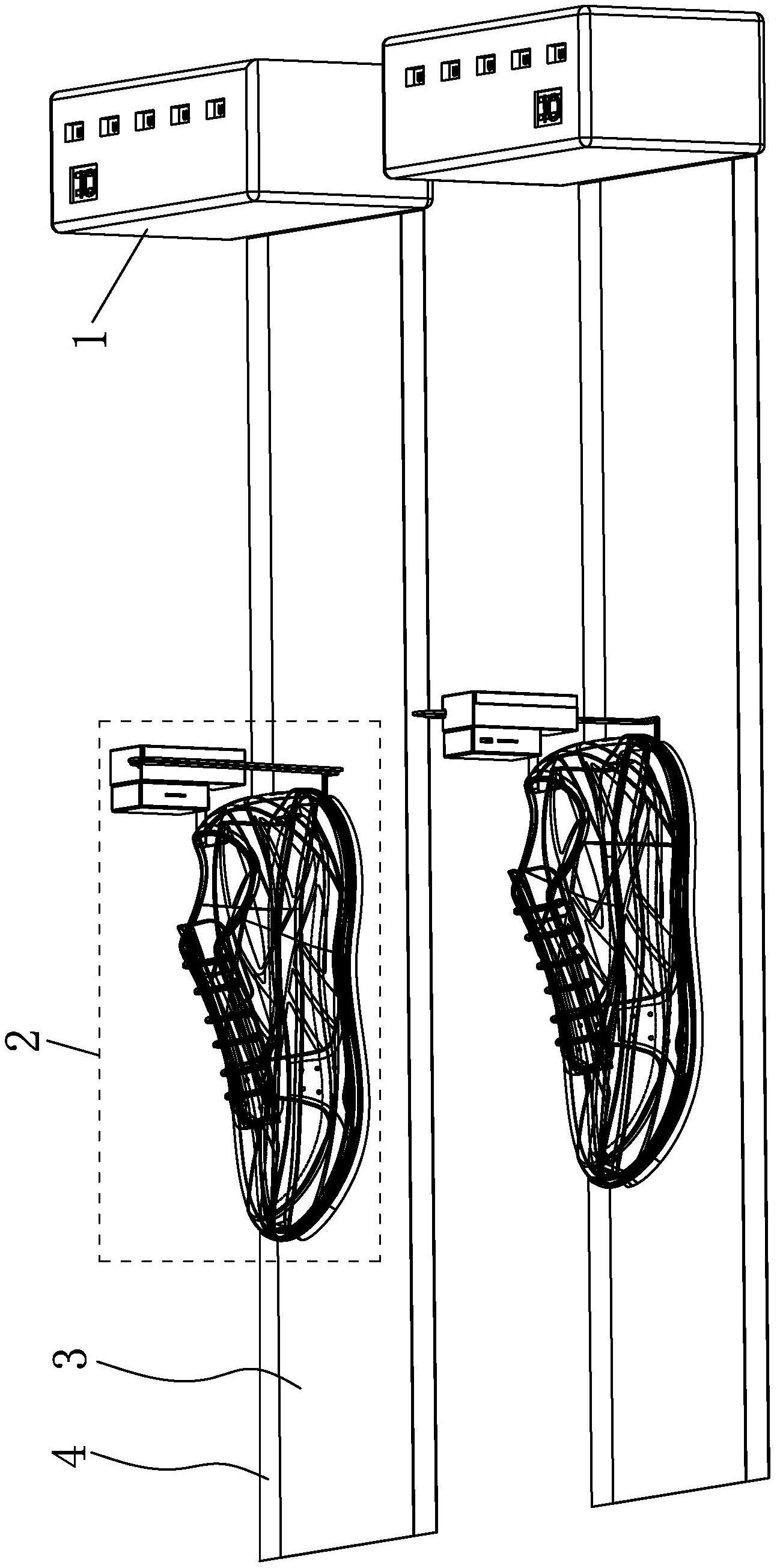
2、一种外骨骼机器人足底触地信号检测设备,它包含压力检测鞋、铜箔层、橡胶层和通讯及处理模块,压力检测鞋分别为左脚的压力检测鞋和右脚的压力检测鞋;橡胶层铺设于现有的地面上,铜箔层铺设在橡胶层上,每个压力检测鞋包含鞋底导电铜箔层、电池、压力信号接收器、足底压力鞋垫和鞋本体;足底压力鞋垫布置在鞋本体内底面上,用于检测足底、足跟和脚掌的压力,压力信号接收器与足底压力鞋垫通信连接,电池和压力信号接收器固定在一起,并安装在小腿上,电池给鞋底导电铜箔层供电,触地时,鞋底导电铜箔层与铜箔层相接触,压力信号接收器和鞋底导电铜箔层分别与通讯及处理模块通信连接。
3、本实用新型相比现有技术的有益效果是:
4、1、足底触地信号检测设备中的鞋中所有部件都可以轻易拿出,并根据不同人鞋号大小不同根据需求进行更换,能够适应不同测试的人。这样可以增加数据获取的多样性,取得更好的实验数据,以便后续的分析与验证。
5、2、实验中实验者只需要穿戴与自己相符的鞋进行行走即可完成实验,实验中行走姿态与正常人体行走姿态符合度高,并且舒适度较双层鞋而言也有了很大提升,所以可以较好地反应人体的真实行走状态。
6、3、触底信号是通过脚底铜箔与地面铜箔相接触产生的,结构简单且稳定,可以在接触的瞬间获得足底触地状态,相较复杂的双层鞋结构,大大降低了实验成本的同时,使准确度有明显提升。
7、下面结合附图和实施例对本实用新型的技术方案作进一步地说明:
技术特征:
1.一种外骨骼机器人足底触地信号检测设备,其特征在于:包含压力检测鞋(2)、铜箔层(3)、橡胶层(4)和通讯及处理模块(1),压力检测鞋(2)分别为左脚的压力检测鞋(2)和右脚的压力检测鞋(2);
2.根据权利要求1所述一种外骨骼机器人足底触地信号检测设备,其特征在于:所述橡胶层(4)为硅胶层。
3.根据权利要求1所述一种外骨骼机器人足底触地信号检测设备,其特征在于:压力信号接收器(23)为蓝牙接收器。
4.根据权利要求1所述一种外骨骼机器人足底触地信号检测设备,其特征在于:还包含鞋垫(24),鞋垫(24)布置在鞋本体(26)的内底面,足底压力鞋垫(25)布置在鞋垫(24)上表面上。
5.根据权利要求1所述一种外骨骼机器人足底触地信号检测设备,其特征在于:所述通讯及处理模块(1)为plc或单片机,鞋底导电铜箔层(21)与通讯及处理模块(1)上的i/o口接收器相连。
技术总结
一种外骨骼机器人足底触地信号检测设备,它包含压力检测鞋、铜箔层、橡胶层和通讯及处理模块,橡胶层铺设于现有的地面上,铜箔层铺设在橡胶层上,每个压力检测鞋包含鞋底导电铜箔层、电池、压力信号接收器、足底压力鞋垫和鞋本体;足底压力鞋垫布置在鞋本体内底面上,用于检测足底、足跟和脚掌的压力,压力信号接收器与足底压力鞋垫通信连接,电池和压力信号接收器固定在一起,并安装在小腿上,电池给鞋底导电铜箔层供电,触地时,鞋底导电铜箔层与铜箔层相接触,压力信号接收器和鞋底导电铜箔层分别与通讯及处理模块通信连接。本技术适应性好,结构简单稳定,检测准确可靠。
技术研发人员:王启豪,张国安,项宇杰,杨本全,张郑宇,王浩宇
受保护的技术使用者:台州学院
技术研发日:20230309
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!