一种腔内医疗器械控制模组及其连接阀的制作方法
本技术涉及医疗器械领域,尤其涉及一种腔内医疗器械控制模组及其连接阀。
背景技术:
1、介入治疗是介于外科、内科治疗之间的新兴治疗方法,就是在医学影像(x线、超声、ct、mri)引导下,在血管、皮肤上作直径几毫米的微小切口或经人体原有的管道,将特制的导管或器械插入至病变部位,进行造影诊断、手术治疗或组织采集的方法。
2、y型阀或t型阀是介入治疗所必需的连通类器械,主要是在介入手术过程中连接于导管类器械辅助导入导丝、造影剂或其它流体药物等,提供进入介入系统的流体通路和防止反流。随着机器人辅助手术的兴起,需要设计新型的y型阀或t型阀并用不同的方式进行控制和动力传递。
技术实现思路
1、基于此,有必要针对现有技术中的不足,提供一种腔内医疗器械控制模组及其连接阀。
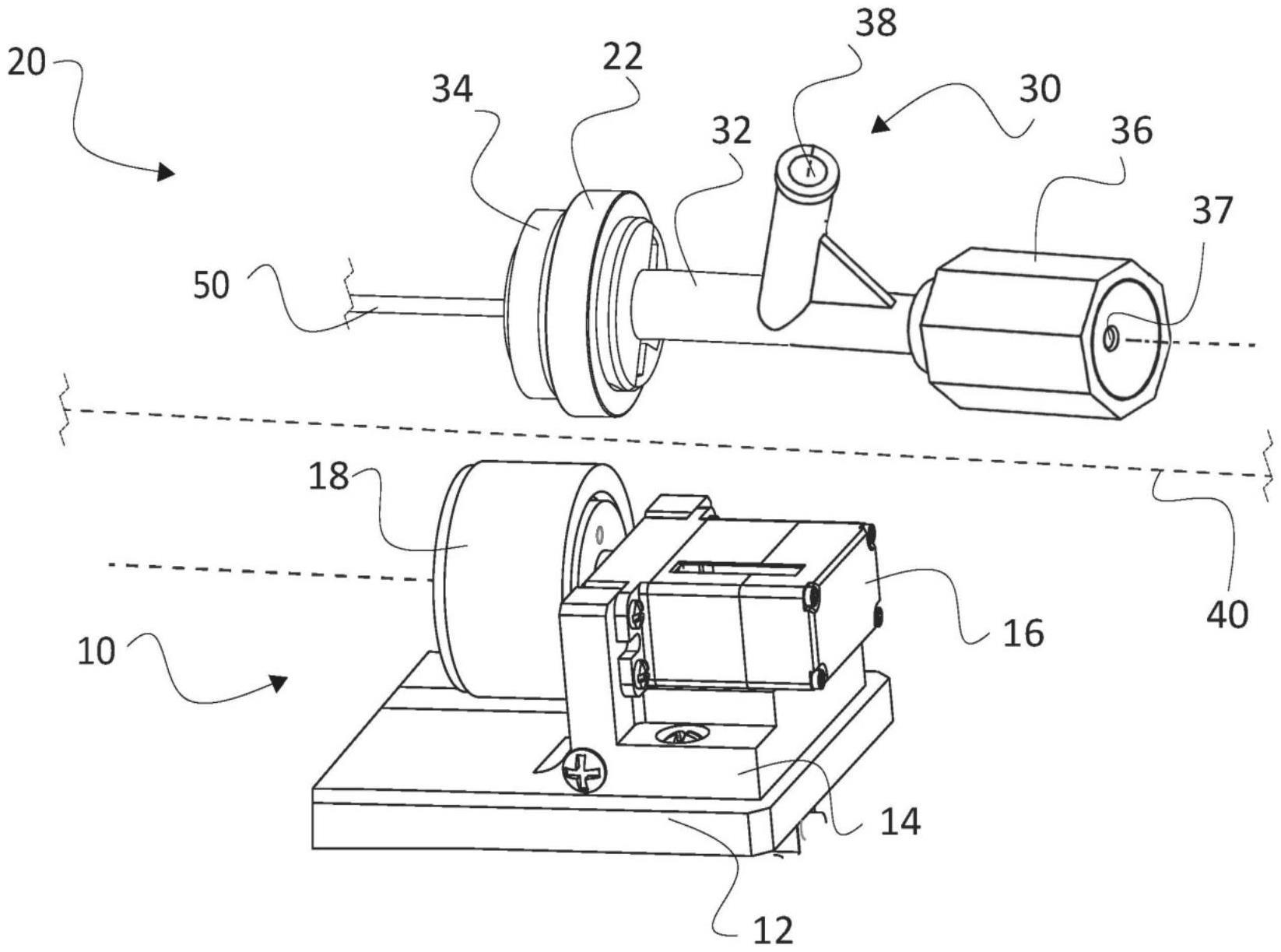
2、本实用新型提供一种腔内医疗器械控制模组,其包括具有驱动件的驱动组件及连接阀组件,所述连接阀组件和驱动组件分别位于隔离开的无菌侧和非无菌侧,所述连接阀组件包括连接阀和固定于所述连接阀的感应件,所述连接阀包括主管体和可转动地安装于所述主管体的连接帽,所述感应件固定于所述连接帽,所述连接帽具有与腔内医疗器械连接的阴型鲁尔锁,所述驱动件非接触地隔空控制所述感应件,让所述连接帽带动腔内医疗器械转动。
3、进一步地,所述驱动件利用场力驱动所述感应件。
4、进一步地,所述驱动件利用磁场力或电场力驱动所述感应件。
5、进一步地,所述驱动件通过磁驱动方式来控制所述感应件。
6、进一步地,所述驱动件通过电磁感应驱动方式来控制所述感应件。
7、进一步地,所述驱动件通过电场耦合驱动方式来控制所述感应件。
8、进一步地,所述驱动件通过直流谐振驱动方式来控制所述感应件。
9、进一步地,所述驱动件与所述感应件之间的驱动方式为无摩擦。
10、进一步地,所述驱动件为磁驱动轮,所述感应件为对应所述磁驱动轮的磁感应轮,所述磁驱动轮非接触地隔空控制所述磁感应轮。
11、进一步地,所述感应件为永磁性感应轮,所述驱动件为永磁性驱动轮,所述永磁性驱动轮非接触地隔空控制所述永磁性感应轮。
12、进一步地,所述永磁性驱动轮和所述永磁性感应轮均包括永磁环。
13、进一步地,所述永磁性驱动轮和所述永磁性感应轮均包括环绕外圆周排列的永磁体。
14、进一步地,所述永磁性驱动轮与所述永磁性感应轮为平行传动。
15、进一步地,所述永磁性驱动轮与所述永磁性感应轮为直交传动。
16、进一步地,所述永磁性驱动轮与所述永磁性感应轮为直角传动。
17、进一步地,所述驱动组件包括外壳和容纳于所述外壳内的驱动器,所述磁驱动轮位于所述外壳内由所述驱动器驱动而转动。
18、本实用新型还提供一种连接阀,其包括主管体和可转动地安装于所述主管体的连接帽,所述连接帽具有与腔内医疗器械连接的阴型鲁尔锁,所述连接帽上固定有感应件,外力非接触地隔空控制所述感应件,让所述连接帽带动腔内医疗器械转动
19、进一步地,所述外力为场力。
20、进一步地,所述外力为磁场力或电场力。
21、进一步地,所述感应件由磁驱动方式控制。
22、进一步地,所述感应件由电磁感应驱动方式控制。
23、进一步地,所述感应件由电场耦合驱动方式控制。
24、进一步地,所述感应件由直流谐振驱动方式控制。
25、进一步地,所述感应件由无摩擦驱动方式控制。
26、进一步地,所述感应件为磁感应轮。
27、进一步地,所述感应件为永磁性感应轮。
28、进一步地,所述连接阀为三通阀。
29、进一步地,所述连接阀为t型阀或y型阀。
30、本实用新型由于是无摩擦传动,相比于皮带等摩擦传动或机械齿轮传动的传动效率更高,而且可以在完全封闭的环境下传动,避免了直接或间接接触机械传动时流体或污物的侵入或渗漏。
技术特征:
1.一种腔内医疗器械控制模组,其特征在于,所述腔内医疗器械控制模组包括具有驱动件的驱动组件及连接阀组件,所述连接阀组件和驱动组件分别位于隔离开的无菌侧和非无菌侧,所述连接阀组件包括连接阀和固定于所述连接阀的感应件,所述连接阀包括主管体和可转动地安装于所述主管体的连接帽,所述感应件固定于所述连接帽,所述连接帽具有与腔内医疗器械连接的阴型鲁尔锁,所述驱动件非接触地隔空控制所述感应件,让所述连接帽带动腔内医疗器械转动。
2.如权利要求1所述的一种腔内医疗器械控制模组,其特征在于:所述驱动件利用场力驱动所述感应件。
3.如权利要求1所述的一种腔内医疗器械控制模组,其特征在于:所述驱动件利用磁场力或电场力驱动所述感应件。
4.如权利要求1所述的一种腔内医疗器械控制模组,其特征在于:所述驱动件通过磁驱动方式来控制所述感应件。
5.如权利要求1所述的一种腔内医疗器械控制模组,其特征在于:所述驱动件通过电磁感应驱动方式来控制所述感应件。
6.如权利要求1所述的一种腔内医疗器械控制模组,其特征在于:所述驱动件通过电场耦合驱动方式来控制所述感应件。
7.如权利要求1所述的一种腔内医疗器械控制模组,其特征在于:所述驱动件通过直流谐振驱动方式来控制所述感应件。
8.如权利要求1所述的一种腔内医疗器械控制模组,其特征在于:所述驱动件与所述感应件之间的驱动方式为无摩擦。
9.如权利要求1所述的一种腔内医疗器械控制模组,其特征在于:所述驱动件为磁驱动轮,所述感应件为对应所述磁驱动轮的磁感应轮,所述磁驱动轮非接触地隔空控制所述磁感应轮。
10.如权利要求1所述的一种腔内医疗器械控制模组,其特征在于:所述感应件为永磁性感应轮,所述驱动件为永磁性驱动轮,所述永磁性驱动轮非接触地隔空控制所述永磁性感应轮。
11.如权利要求10所述的一种腔内医疗器械控制模组,其特征在于:所述永磁性驱动轮和所述永磁性感应轮均包括永磁环。
12.如权利要求10所述的一种腔内医疗器械控制模组,其特征在于:所述永磁性驱动轮和所述永磁性感应轮均包括环绕外圆周排列的永磁体。
13.如权利要求11或12所述的一种腔内医疗器械控制模组,其特征在于:所述永磁性驱动轮与所述永磁性感应轮为平行传动。
14.如权利要求11或12所述的一种腔内医疗器械控制模组,其特征在于:所述永磁性驱动轮与所述永磁性感应轮为直交传动。
15.如权利要求11或12所述的一种腔内医疗器械控制模组,其特征在于:所述永磁性驱动轮与所述永磁性感应轮为直角传动。
16.如权利要求9所述的一种腔内医疗器械控制模组,其特征在于:所述驱动组件包括外壳和容纳于所述外壳内的驱动器,所述磁驱动轮位于所述外壳内由所述驱动器驱动而转动。
17.一种连接阀,其特征在于,所述连接阀包括主管体和可转动地安装于所述主管体的连接帽,所述连接帽具有与腔内医疗器械连接的阴型鲁尔锁,所述连接帽上固定有感应件,外力非接触地隔空控制所述感应件,让所述连接帽带动腔内医疗器械转动。
18.如权利要求17所述的一种连接阀,其特征在于:所述外力为场力。
19.如权利要求17所述的一种连接阀,其特征在于:所述外力为磁场力或电场力。
20.如权利要求17所述的一种连接阀,其特征在于:所述感应件由磁驱动方式控制。
21.如权利要求17所述的一种连接阀,其特征在于:所述感应件由电磁感应驱动方式控制。
22.如权利要求17所述的一种连接阀,其特征在于:所述感应件由电场耦合驱动方式控制。
23.如权利要求17所述的一种连接阀,其特征在于:所述感应件由直流谐振驱动方式控制。
24.如权利要求17所述的一种连接阀,其特征在于:所述感应件由无摩擦驱动方式控制。
25.如权利要求17所述的一种连接阀,其特征在于:所述感应件为磁感应轮。
26.如权利要求17所述的一种连接阀,其特征在于:所述感应件为永磁性感应轮。
27.如权利要求17所述的一种连接阀,其特征在于:所述连接阀为三通阀。
28.如权利要求17所述的一种连接阀,其特征在于:所述连接阀为t型阀或y型阀。
技术总结
本技术提供一种腔内医疗器械控制模组,其包括具有驱动件的驱动组件及连接阀组件,所述连接阀组件和驱动组件分别位于隔离开的无菌侧和非无菌侧,所述连接阀组件包括连接阀和固定于所述连接阀的感应件,所述连接阀包括主管体和可转动地安装于所述主管体的连接帽,所述感应件固定于所述连接帽,所述连接帽具有与腔内医疗器械连接的阴型鲁尔锁,所述驱动件非接触地隔空控制所述感应件,让所述连接帽带动腔内医疗器械转动,实现了无摩擦式高效传动。
技术研发人员:曹云飞,安麟簇·辛
受保护的技术使用者:深圳市通甪科技有限公司
技术研发日:20230316
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!