一种线性跟踪器结构以及手术导航系统的制作方法
本技术涉及手术导航工具,更具体地说,是涉及一种线性跟踪器结构以及手术导航系统。
背景技术:
1、手术导航系统越来越多地应用在骨科手术中,其可以将患者的影像数据与患者生理解剖结构准确关联,辅助术者执行手术规划,并引导术者操作手术工具。手术导航系统使得骨科手术更加精准、迅速和安全。传统的手术工具无法被手术导航系统跟踪,因此一般在手术工具安装一个跟踪器,为避免跟踪器在手术过程中对手术工具造成干扰,因此会把跟踪器放置在手术工具的尾部。在这种情况下,手术工具的前端的操作部(用于手术的作用部分)和安装在手术工具尾端(手柄部)的跟踪器具有较大的距离,不易通过设计机械连接结构保证这两者的相对位置关系。因此为保证手术的准确度,往往还需要在手术过程中对对手术工具相当于跟踪器的位置进行标定,导致手术工具在使用上的复杂度提高。从而不仅需要提供一套复杂的机械连接结构,而且导致手术工具的使用过程更繁琐。
2、因此,现有技术还有待于改进和发展。
技术实现思路
1、本实用新型的目的在于提供一种线性跟踪器结构,具有结构简单、制造容易、便于与手术工具连接、不需要对跟踪器和手术工具进行术中标定从而节约手术时间、使用方便的优点。
2、为实现上述目的,本实用新型采用的技术方案是:
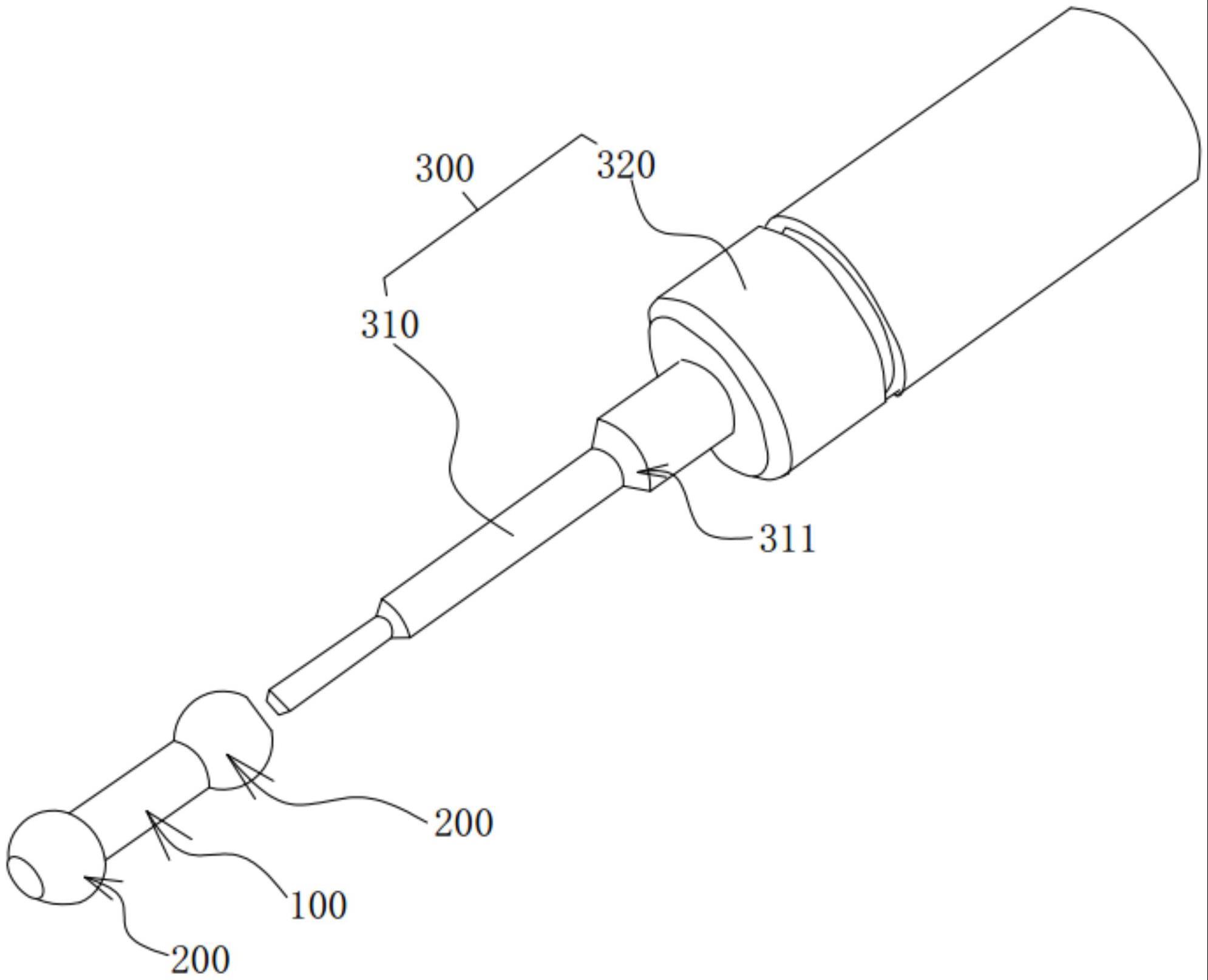
3、一方面,本实用新型提供一种线性跟踪器结构,包括:配合部,配合部用于连接在手术工具的操作件上;
4、至少两个光学标记部,至少两个光学标记部间隔设置在配合部上;
5、其中,至少两个光学标记部与操作件的顶端之间的连线在同一直线上;
6、配合部上开设有套接孔,套接孔贯穿光学标记部,并用于套设在操作件上且操作件的顶端凸出于套接孔;
7、套接孔内设置有内螺纹,内螺纹用于与操作件上的外螺纹相配连接。
8、在一个实施例中,套接孔内设置有锥形面,锥形面用于与操作件上的圆锥面相配对接。
9、在一个实施例中,光学标记部具有被动反光表面,用以被外部的导航相机所识别。
10、在一个实施例中,光学标记部包括反光球,反光球连接配合部;
11、反光球的球面为被动反光表面。
12、在一个实施例中,两个光学标记部分别位于配合部的两端。
13、在一个实施例中,配合部的直径小于光学标记部的直径。
14、在一个实施例中,光学标记部与配合部一体成型。
15、另一方面,本实用新型还提出一种手术导航系统,其中,包括导航相机、工作跟踪器以及如上所述的线性跟踪器,线性跟踪器用于连接在手术工具的操作件上;
16、其中,线性跟踪器中的两个光学标记部之间的距离均小于线性跟踪器和工作跟踪器中的任意两个光学标记部之间的距离。
17、本实用新型提供的一种线性跟踪器结构以及手术导航系统的有益效果至少在于:本方案采用配合部直接连接在手术工具上,且通过三点成一条直线的形式,不需要对跟踪器和手术工具进行术中标定就可以更简单的识别到手术工具的操作件,从而节约手术时间;而且结构简单、制造容易、配合部与手术工具连接方便,不会对手术工具的操作件造成手术过程中的干扰,使用方便。
技术特征:
1.一种线性跟踪器结构,其特征在于,包括:配合部,所述配合部用于连接在手术工具的操作件上;
2.如权利要求1所述的线性跟踪器结构,其特征在于,所述套接孔内设置有锥形面,所述锥形面用于与所述操作件上的圆锥面相配对接。
3.如权利要求1所述的线性跟踪器结构,其特征在于,所述光学标记部具有被动反光表面,用以被外部的导航相机所识别。
4.如权利要求3所述的线性跟踪器结构,其特征在于,所述光学标记部包括反光球,所述反光球连接所述配合部;
5.如权利要求1所述的线性跟踪器结构,其特征在于,两个所述光学标记部分别位于所述配合部的两端。
6.如权利要求1所述的线性跟踪器结构,其特征在于,所述配合部的直径小于所述光学标记部的直径。
7.如权利要求1所述的线性跟踪器结构,其特征在于,所述光学标记部与所述配合部一体成型。
8.一种手术导航系统,其特征在于,包括导航相机、工作跟踪器以及如权利要求1-7任一所述的线性跟踪器,所述线性跟踪器用于连接在手术工具的操作件上;
技术总结
本技术涉及手术机器人技术领域,提供一种线性跟踪器结构以及手术导航系统,线性跟踪器结构包括:配合部,配合部用于连接在手术工具的操作件上;至少两个光学标记部,至少两个光学标记部间隔设置在配合部上;其中,至少两个光学标记部与操作件的顶端之间的连线在同一直线上;配合部上开设有套接孔,套接孔贯穿光学标记部,并用于套设在操作件上且操作件的顶端凸出于套接孔;套接孔内设置有内螺纹,内螺纹用于与操作件上的外螺纹相配连接。本技术用具有结构简单、制造容易、便于与手术工具连接、不需要对跟踪器和手术工具进行术中标定从而节约手术时间、使用方便的优点。
技术研发人员:邓明明,贾英杰
受保护的技术使用者:北京天智航医疗科技股份有限公司
技术研发日:20230404
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!