一种上肢外骨骼康复训练机器人
本技术属于康复训练,具体地说,涉及一种上肢外骨骼康复训练机器人。
背景技术:
1、上肢外骨骼康复训练机器人用于因疾病引起的上肢运动功能障碍,康复医学界主要通过神经重塑原理实现患者上肢运动功能康复。
2、患者在进行双臂的康复训练时,先需要使用安装带并在魔术贴的粘连作用下,将患者的手臂与机械臂相连接,然后才能开始手臂的康复训练,而在使用安装带进行手臂与机械臂连接时,需要在他人的协助下才能完成,患者无法独立的完成手臂与机械臂之间的连接,从而降低了患者进行康复训练的效率及上肢外骨骼康复训练机器人使用的灵活性。
3、有鉴于此特提出本实用新型。
技术实现思路
1、为解决上述技术问题,本实用新型采用技术方案的基本构思是:
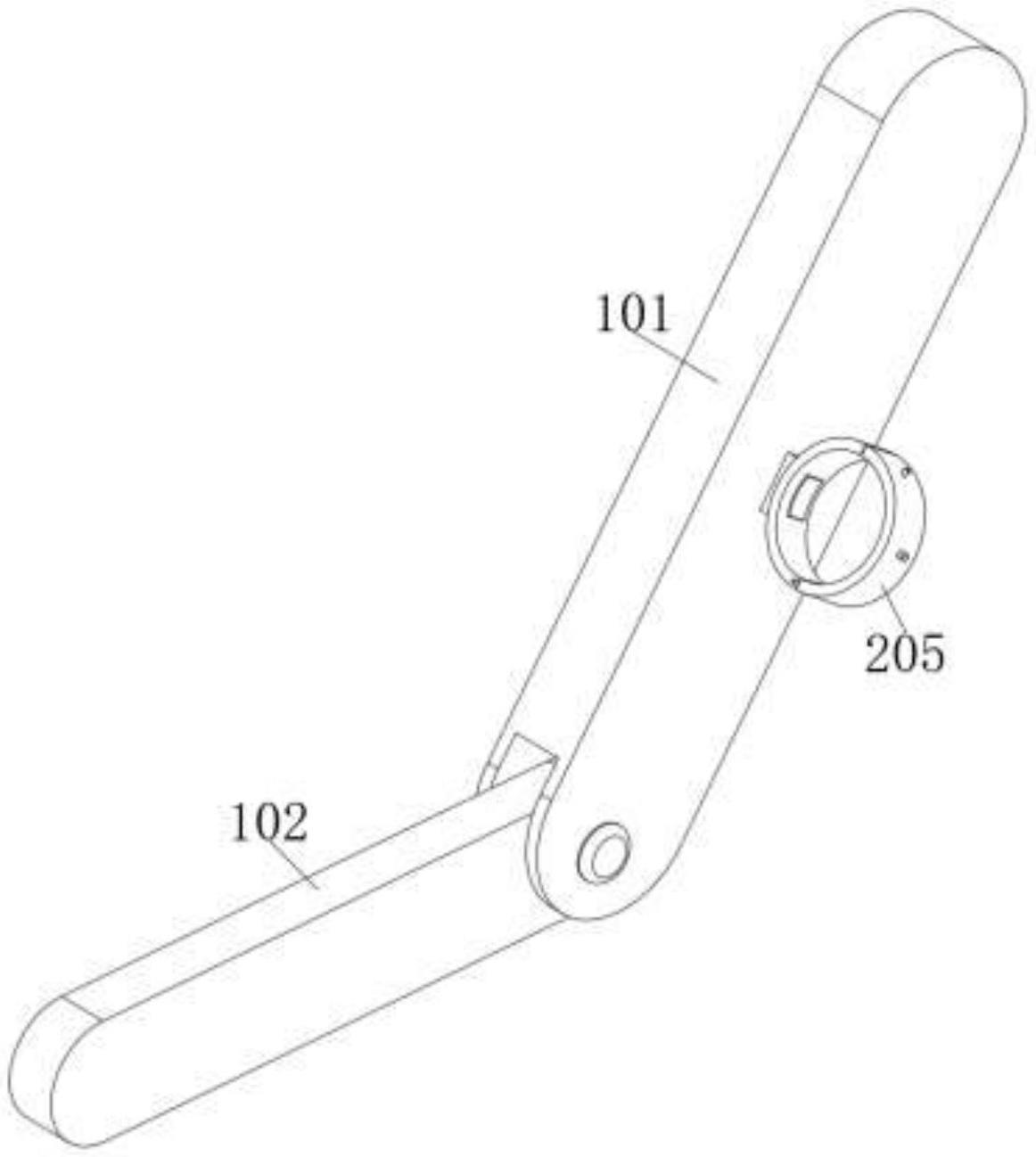
2、一种上肢外骨骼康复训练机器人,包括康复训练机器人,所述康复训练机器人由上臂及转动连接在上臂上的前臂组成,还包括设置在上臂和前臂上用于对患者手臂进行固定的固定机构;
3、所述固定机构包括半圆形设置的下环及上环,所述下环通过固定板固定连接在上臂上,所述上臂的一端开设有安装槽,所述安装槽上通过转动轴转动连接有连接板,所述连接板与上环的一端连接,所述下环上设有用于对上环进行驱动的驱动组件。
4、所述驱动组件包括固定连接在下环侧壁上的驱动马达,所述驱动马达的输出端与转动轴相连接,所述下环上设有用于对驱动马达进行启动的启动机构。
5、所述启动机构包括开设在下环上的启动腔,所述启动腔上滑动连接有启动杆,所述启动杆位于启动腔内部的一端固定连接有滑动板,所述滑动板的另一侧设有第一导电板,所述启动腔的底壁上设有第二导电板,所述第一导电板及第二导电板与驱动马达电性相连,所述启动杆的侧壁上套设有第一弹簧,所述第一弹簧的两端分别与启动腔的上壁及滑动板相连接,所述启动杆的另一端固定连接有弧形启动板。
6、所述上环上设有用于对患者手臂进行挤压的挤压机构,所述挤压机构包括开设在上环内壁上的挤压槽,所述挤压槽内设有橡胶气囊,所述上环的外壁上设有气泵,所述气泵的输出端与橡胶气囊相连接。
7、所述上环的外壁上设有出气管,所述出气管内设有弹簧单向阀,所述弹簧单向阀的导通方向为橡胶气囊的内部至外部。
8、本实用新型与现有技术相比具有以下有益效果:
9、本实用新型通过固定机构的设置,在驱动机构的驱动作用及启动机构的启动作用下,实现了对手臂的自动夹紧固定及自动解除固定,无需他人协助操作,患者可独立的完成手臂与机械臂之间的连接,从而提高了患者进行康复训练的效率及上肢外骨骼康复训练机器人使用的灵活性。
10、下面结合附图对本实用新型的具体实施方式作进一步详细的描述。
技术特征:
1.一种上肢外骨骼康复训练机器人,包括:
2.根据权利要求1所述的一种上肢外骨骼康复训练机器人,其特征在于,所述驱动组件包括固定连接在下环(202)侧壁上的驱动马达(3),所述驱动马达(3)的输出端与转动轴相连接,所述下环(202)上设有用于对驱动马达(3)进行启动的启动机构。
3.根据权利要求2所述的一种上肢外骨骼康复训练机器人,其特征在于,所述启动机构包括开设在下环(202)上的启动腔(401),所述启动腔(401)上滑动连接有启动杆(402),所述启动杆(402)位于启动腔(401)内部的一端固定连接有滑动板(403),所述滑动板(403)的另一侧设有第一导电板(404),所述启动腔(401)的底壁上设有第二导电板(405),所述第一导电板(404)及第二导电板(405)与驱动马达(3)电性相连,所述启动杆(402)的侧壁上套设有第一弹簧(406),所述第一弹簧(406)的两端分别与启动腔(401)的上壁及滑动板(403)相连接,所述启动杆(402)的另一端固定连接有弧形启动板(407)。
4.根据权利要求1所述的一种上肢外骨骼康复训练机器人,其特征在于,所述上环(205)上设有用于对患者手臂进行挤压的挤压机构,所述挤压机构包括开设在上环(205)内壁上的挤压槽(501),所述挤压槽(501)内设有橡胶气囊(502),所述上环(205)的外壁上设有气泵(503),所述气泵(503)的输出端与橡胶气囊(502)相连接。
5.根据权利要求4所述的一种上肢外骨骼康复训练机器人,其特征在于,所述上环(205)的外壁上设有出气管(6),所述出气管(6)内设有弹簧单向阀,所述弹簧单向阀的导通方向为橡胶气囊(502)的内部至外部。
技术总结
本技术公开了一种上肢外骨骼康复训练机器人,包括康复训练机器人,所述康复训练机器人由上臂及转动连接在上臂上的前臂组成,还包括设置在上臂和前臂上用于对患者手臂进行固定的固定机构,所述固定机构包括半圆形设置的下环及上环,所述下环通过固定板固定连接在上臂上,所述上臂的一端开设有安装槽。本技术通过固定机构的设置,在驱动机构的驱动作用及启动机构的启动作用下,实现了对手臂的自动夹紧固定及自动解除固定,无需他人协助操作,患者可独立的完成手臂与机械臂之间的连接,从而提高了患者进行康复训练的效率及上肢外骨骼康复训练机器人使用的灵活性。
技术研发人员:孙艳萍,屈沛东,屈文涛,徐剑波
受保护的技术使用者:西安石油大学
技术研发日:20230410
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!