一种非侵入式的探测跟踪器以及手术导航系统的制作方法
本技术涉及手术导航工具,更具体地说,是涉及一种非侵入式的探测跟踪器以及手术导航系统。
背景技术:
1、手术导航系统越来越多地应用在骨科手术中,其可以将患者的影像数据与患者生理解剖结构准确关联,辅助术者执行手术规划,并引导术者操作手术器械。手术导航系统使得骨科手术更加精准、迅速和安全。在骨科手术导航机器人系统中,将患者的影像数据与患者生理解剖结构准确关联的关键是患者跟踪器。其中患者跟踪器刚性固定在患者术区的骨性结构上,通过导航相机进行拍摄定位,从而作为后续图像配准和机械臂截骨的基准。一般都在手术过程中采用单针、双针或者棘突夹等方式将患者跟踪器固定在患者术区的骨头上。但是由于固定操作、术区骨疏松或者软组织牵拉等原因,患者跟踪器容易发生移动,从而会引起手术过程中的导航位置发生变化,导致手术失败,甚至由于位置偏差会对患者产生伤害。在有些手术过程中,为防止患者跟踪器发生移动而没有被及时检测到的问题,往往采用在患者术区的骨性结构上额外植入一个校验钉,通过前后两次测量的校验钉相当于患者跟踪器的位置的变化,来判断患者跟踪器是否相对于患者术区的骨性结构发生位移,实现了手术过程中对患者跟踪器的位置的检测。
2、但是,现有采用校验钉对患者跟踪器的检测过程是一种侵入式的方案,校验钉在植入患者的体内过程中,会对患者产生伤害,特别是在脊柱手术中,其植入过程中要特别小心,危险性很高。
3、因此,现有技术还有待于改进和发展。
技术实现思路
1、本实用新型的目的在于提供一种非侵入式的探测跟踪器以及手术导航系统,具有能在患者体外被检测到,替换现有的校验钉,不会对患者产生伤害,降低了手术的危险性的优点。
2、为实现上述目的,本实用新型采用的技术方案是:
3、一方面,本实用新型提供一种非侵入式的探测跟踪器,包括:
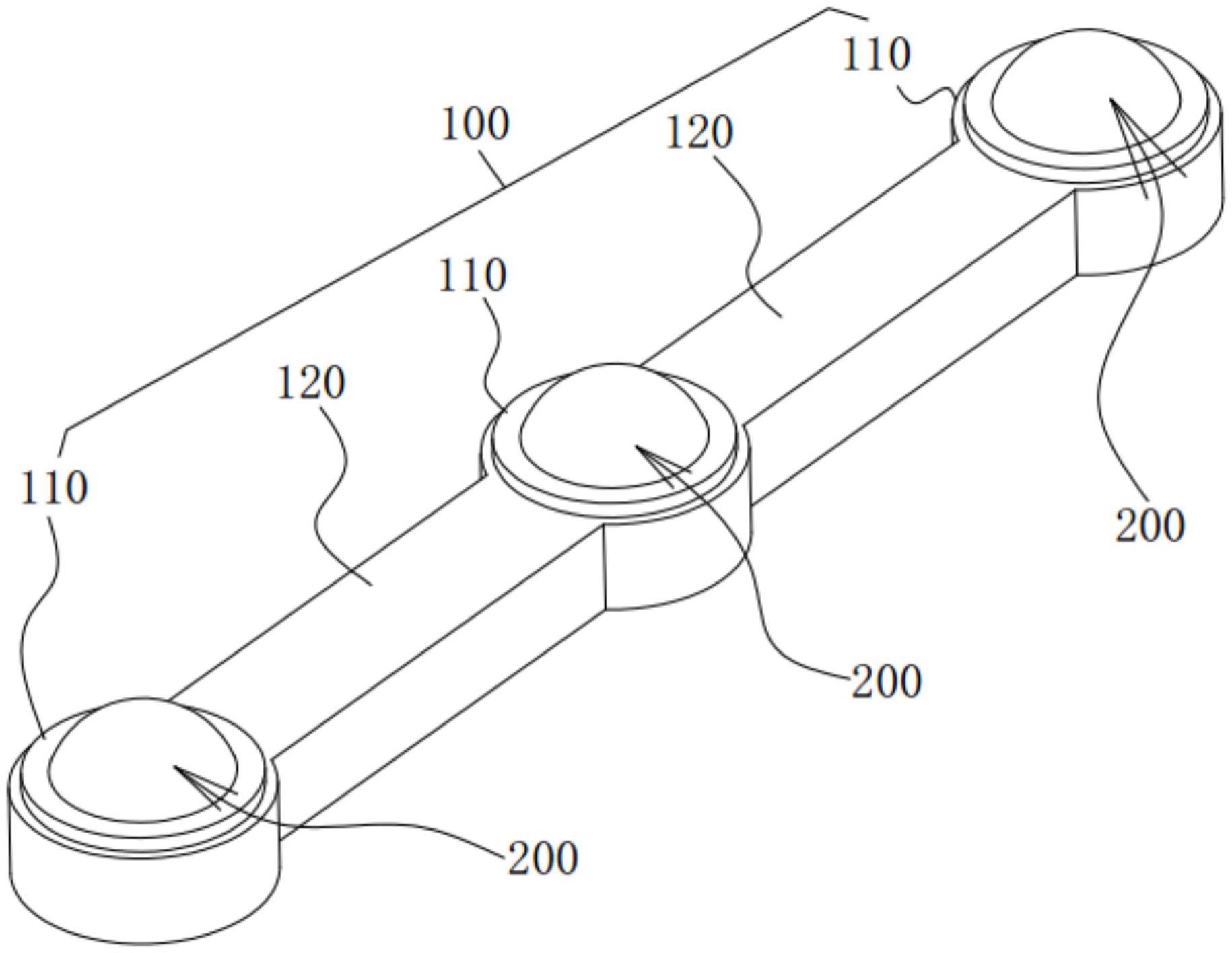
4、壳体,壳体用于设置在患者的皮肤表面;
5、多个光学标记部,多个光学标记部均连接在壳体上并沿预设方向呈直线间隔设置;
6、多个光学标记部的分布直线用于与患者跟踪器的坐标轴之间形成监测角度,多个光学标记部的分布直线的端点用于与患者跟踪器的坐标原点之间形成监测距离。
7、在一个实施例中,壳体包括:安装座,安装座设置有多个,多个光学标记部分别安装在多个安装座上,
8、连接部,连接部连接相邻的两个安装座。
9、在一个实施例中,安装座为圆形,连接部为长条形;
10、安装座的直径大于长条形的宽度。
11、在一个实施例中,相邻安装座之间的距离相等。
12、在一个实施例中,光学标记部为被动式反光标记部,并用于被导航相机识别到探测原点以及分布直线,其中探测原点为多个被动式反光标记部所形成的探测坐标的原点,分布直线为多个被动式反光标记部在预设方向上的连线。
13、在一个实施例中,被动式反光标记部包括:透光球体,透光球体具有上半球体,透光球体连接在安装座上且上半球体凸出于安装座;
14、反光层,反光层设置在安装座内,并用于将上半球体进入的光反射出去。
15、在一个实施例中,光学标记部设置有三个,三个光学标记部呈直线排列。
16、在一个实施例中,壳体通过粘接件连接在患者的皮肤表面。
17、在一个实施例中,粘接件包括胶带,胶带粘接连接部以及患者的皮肤表面。
18、另一方面,本申请还提出一种手术导航系统,其中包括导航相机、患者跟踪器以及如上所述的探测跟踪器;
19、导航相机用于检测探测跟踪器的直线方向与患者跟踪器的角度,以及探测跟踪器到患者跟踪器的距离。
20、本实用新型提供的一种非侵入式的探测跟踪器以及手术导航系统的有益效果至少在于:通过将壳体固定设置在患者的手术区域附近的皮肤上,当患者的术区位置安装患者跟踪器进行定位后,使壳体上的光学标记部也被识别,由于本探测跟踪器中的各光学标记部的位置固定,因此只要患者跟踪器不动,那么两者之间的相对位置也不同。基于此原理,在手术过程中,通过在手术过程中,监控患者跟踪器与本探测跟踪器的距离以及角度,就能判断出患者跟踪器的位置是否移动,从而实现了对患者跟踪器的位置监测。通过本方案一方面可以借用手术机器人自动的导航相机,采用多个光学标记部呈直线间隔设置的方式,方便导航相机识别,且可以确立以预设方向所排列的直线作为判断患者跟踪器是否移动的参考基准,从而降低测量成本;另一方面,由于本探测跟踪器是设置在患者皮肤表面,从而实现的是非接触的测量,不会像校验钉那样对人体产生伤害,手术危险性小。
技术特征:
1.一种非侵入式的探测跟踪器,其特征在于,包括:壳体,所述壳体用于设置在患者的皮肤表面;
2.如权利要求1所述的非侵入式的探测跟踪器,其特征在于,所述壳体包括:安装座,所述安装座设置有多个,多个所述光学标记部分别安装在多个所述安装座上,
3.如权利要求2所述的非侵入式的探测跟踪器,其特征在于,所述安装座为圆形,所述连接部为长条形;
4.如权利要求3所述的非侵入式的探测跟踪器,其特征在于,相邻所述安装座之间的距离相等。
5.如权利要求2所述的非侵入式的探测跟踪器,其特征在于,所述光学标记部为被动式反光标记部,并用于被导航相机识别到探测原点以及分布直线,其中所述探测原点为多个所述被动式反光标记部所形成的探测坐标的原点,所述分布直线为多个所述被动式反光标记部在所述预设方向上的连线。
6.如权利要求5所述的非侵入式的探测跟踪器,其特征在于,所述被动式反光标记部包括:透光球体,所述透光球体具有上半球体,所述透光球体连接在所述安装座上且所述上半球体凸出于所述安装座;
7.如权利要求1所述的非侵入式的探测跟踪器,其特征在于,所述光学标记部设置有三个,三个所述光学标记部呈直线排列。
8.如权利要求2所述的非侵入式的探测跟踪器,其特征在于,所述壳体通过粘接件连接在患者的皮肤表面。
9.如权利要求8所述的非侵入式的探测跟踪器,其特征在于,所述粘接件包括胶带,所述胶带粘接所述连接部以及患者的皮肤表面。
10.一种手术导航系统,其特征在于,包括导航相机、患者跟踪器以及如权利要求1-9任一所述的探测跟踪器;
技术总结
本技术涉及手术机器人技术领域,提供一种非侵入式的探测跟踪器以及手术导航系统,包括:壳体,壳体用于设置在患者的皮肤表面;多个光学标记部,多个光学标记部均连接在壳体上并沿预设方向呈直线间隔设置;多个光学标记部的分布直线用于与患者跟踪器的坐标轴之间形成监测角度,多个光学标记部的分布直线的端点用于与患者跟踪器的坐标原点之间形成监测距离。本技术用具有能在患者体外被检测到,替换现有的校验钉,不会对患者产生伤害,降低了手术的危险性的优点。
技术研发人员:邓明明,李丙乐
受保护的技术使用者:北京天智航医疗科技股份有限公司
技术研发日:20230411
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!