本技术涉及医疗器械,尤其涉及一种多功能手指康复训练机器人。
背景技术:
1、我国现有的脑中风患者多达600万以上。虽然现有的医疗水平可以治愈60-70%的中风患者,但大多数的幸存患者均存在上肢或下肢运动功能缺陷。手是人类生活和从事社会生产劳动的精细工具,但由于其内部神经、血管、小肌肉纵横交错,导致手部损伤的治疗难度增大,且治疗周期时间长。手指功能障碍是中风后的高致残的表现之一,常表现为患侧上肢手指不能握力,屈伸功能障碍,甚至完全丧失。因此中风患者手指康复训练尤为重要,指关节训练仪是基于人体仿生学,体验舒适,模拟运动更真实,它将手部运动包括集团屈曲张开及分指、轮指等二十多种精细动作用于手部康复,患者能更好的提高康复疗效。同时配有机械手外壳及痉挛反馈机制,更好地保护患者。
2、现有的大多数的手指康复训练机器人,其在对于手指的固定方面并不理想,很容易造成患者关节跟不上节奏,导致产生手指与装置脱离的情况,并且现有的大多数的手指康复训练机器人,其在调节装置的松紧程度上并不理想。因此,本领域技术人员提供了一种多功能手指康复训练机器人,以解决上述背景技术中提出的问题。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种多功能手指康复训练机器人,其具有固定手指关节更加稳固的功能,并且其还具有对于固定关节的松紧程度进行调整的功能,以及可以自行进行关节调整活动的功能。
2、为实现上述目的,本实用新型提供了如下技术方案:
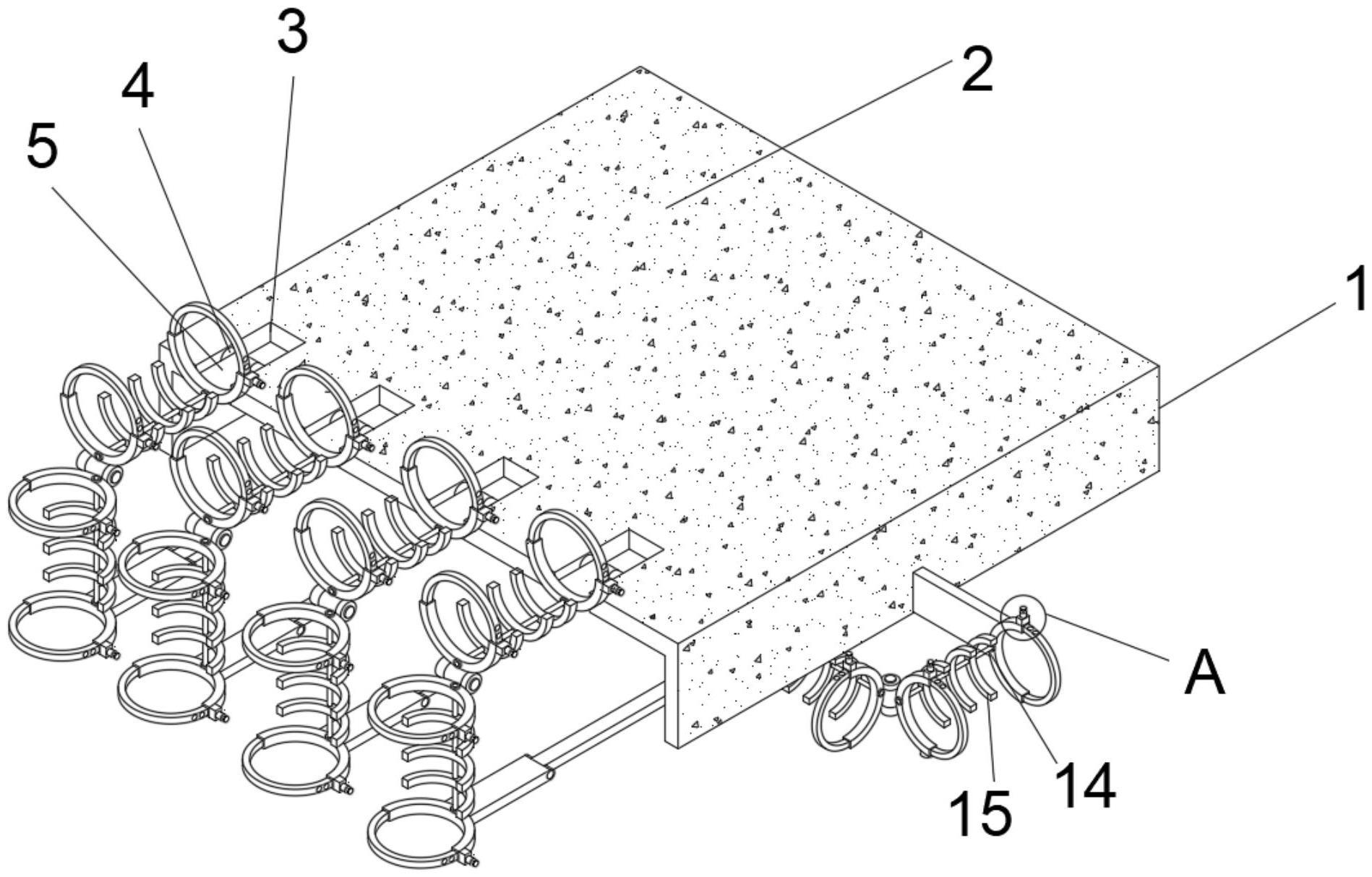
3、一种多功能手指康复训练机器人,包括板体,所述板体的上端面铺设有柔软层,所述板体的一侧开设有多个转动槽,多个所述转动槽的一侧固定连接有转动轴,多个所述转动轴的外侧壁套设有连接块,多个所述连接块远离转动轴的一侧固定连接有套杆,多个所述套杆的一侧套设有伸缩杆,多个所述伸缩杆的一侧开设有多个凹槽,多个所述套杆的一端的一侧固定连接有固定块,多个所述固定块的上端面均固定连接有螺纹座,多个所述螺纹座的上端面贯穿设置有固定螺栓;
4、靠下端的多个所述套杆的一侧固定连接有连系板,多个所述连系板远离套杆的一端固定连接有连系杆,多个所述连系杆的一端套设有传动气缸。
5、通过上述技术方案,通过设置连接杆、固定架、板体、套杆、伸缩杆和柔软层,使得装置得以通过多个连接杆和固定架,对手指进行更加牢固的固定,通过设置套杆和伸缩杆,使得装置得以固定更加牢固,通过设置套杆、伸缩杆、凹槽、固定块、螺纹座和固定螺栓,使得装置得以通过伸缩杆套设在套杆内,使得装置得以通过滑动伸缩杆来根据病人调整尺寸,当尺寸调整完毕,通过固定螺栓拧动进入螺纹座和固定块从而卡到凹槽内,使得装置得以自由的根据病人调整尺寸,使得装置使用更加方便,通过设置转动槽、转动轴、连接块、连系杆、传动气缸、控制器、连接线和接线板,使得装置得以通过传动气缸和连系板来带动固定架和套杆,使得装置得以转动角度,手部的接触信号,传递到控制器,通过控制器来调整传动气缸从而调整装置的角度,使得装置使用更加灵活,使用更加方便。
6、进一步地,所述板体的内地端面固定设置有控制器,所述控制器的下端面固定连接有连接线,所述连接线远离控制器的一端固定连接至接线板;
7、通过上述技术方案,使得装置得以根据手指情况进行控制装置弯曲角度。
8、进一步地,多个所述套杆的一侧转动连接有转动块,多个所述转动块的一侧贯穿设置有连接轴;
9、通过上述技术方案,通过设置转动块和连接轴,使得装置得以更方便转动。
10、进一步地,多个所述套杆的一侧固定连接有连接杆,多个所述连接杆的外侧壁固定连接有多个固定架;
11、通过上述技术方案,通过设置连接杆和固定架,使得装置得以更好的固定手指关节。
12、进一步地,所述控制器与多个所述传动气缸之间为电性连接;
13、通过上述技术方案,通过设置控制器与多个所述传动气缸之间为电性连接,使得装置得以更方便调整。
14、进一步地,多个所述连系板的数量为五个;
15、通过上述技术方案,通过设置多个连系板,使得装置得以控制弯曲的角度。
16、进一步地,所述控制器位于传动气缸的后方;
17、通过上述技术方案,通过设置控制器位于传动气缸的后方,使得双方互不干涉。
18、进一步地,所述接线板位于板体的后方;
19、通过上述技术方案,通过设置接线板位于板体的后方,使得接线板得以更方便接通线路。
20、本实用新型具有如下有益效果:
21、1、本实用新型提出的一种多功能手指康复训练机器人,通过设置连接杆、固定架、板体、套杆、伸缩杆和柔软层,使得装置得以通过多个连接杆和固定架,对手指进行更加牢固的固定,通过设置套杆和伸缩杆,使得装置得以固定更加牢固。
22、2、本实用新型提出的一种多功能手指康复训练机器人,通过设置套杆、伸缩杆、凹槽、固定块、螺纹座和固定螺栓,使得装置得以通过伸缩杆套设在套杆内,使得装置得以通过滑动伸缩杆来根据病人调整尺寸,当尺寸调整完毕,通过固定螺栓拧动进入螺纹座和固定块从而卡到凹槽内,使得装置得以自由的根据病人调整尺寸,使得装置使用更加方便。
23、3、本实用新型提出的一种多功能手指康复训练机器人,通过设置转动槽、转动轴、连接块、连系杆、传动气缸、控制器、连接线和接线板,使得装置得以通过传动气缸和连系板来带动固定架和套杆,使得装置得以转动角度,手部的接触信号,传递到控制器,通过控制器来调整传动气缸从而调整装置的角度,使得装置使用更加灵活,使用更加方便。
技术特征:1.一种多功能手指康复训练机器人,包括板体(1),其特征在于:所述板体(1)的上端面铺设有柔软层(2),所述板体(1)的一侧开设有多个转动槽(3),多个所述转动槽(3)的一侧固定连接有转动轴(4),多个所述转动轴(4)的外侧壁套设有连接块(5),多个所述连接块(5)远离转动轴(4)的一侧固定连接有套杆(16),多个所述套杆(16)的一侧套设有伸缩杆(17),多个所述伸缩杆(17)的一侧开设有多个凹槽(18),多个所述套杆(16)的一端的一侧固定连接有固定块(19),多个所述固定块(19)的上端面均固定连接有螺纹座(20),多个所述螺纹座(20)的上端面贯穿设置有固定螺栓(21);
2.根据权利要求1所述的一种多功能手指康复训练机器人,其特征在于:所述板体(1)的内地端面固定设置有控制器(8),所述控制器(8)的下端面固定连接有连接线(9),所述连接线(9)远离控制器(8)的一端固定连接至接线板(10)。
3.根据权利要求1所述的一种多功能手指康复训练机器人,其特征在于:多个所述套杆(16)的一侧转动连接有转动块(12),多个所述转动块(12)的一侧贯穿设置有连接轴(13)。
4.根据权利要求1所述的一种多功能手指康复训练机器人,其特征在于:多个所述套杆(16)的一侧固定连接有连接杆(14),多个所述连接杆(14)的外侧壁固定连接有多个固定架(15)。
5.根据权利要求2所述的一种多功能手指康复训练机器人,其特征在于:所述控制器(8)与多个所述传动气缸(7)之间为电性连接。
6.根据权利要求1所述的一种多功能手指康复训练机器人,其特征在于:多个所述连系板(11)的数量为五个。
7.根据权利要求2所述的一种多功能手指康复训练机器人,其特征在于:所述控制器(8)位于传动气缸(7)的后方。
8.根据权利要求2所述的一种多功能手指康复训练机器人,其特征在于:所述接线板(10)位于板体(1)的后方。
技术总结本技术涉及医疗器械技术领域,公开了一种多功能手指康复训练机器人,包括板体,所述板体的上端面铺设有柔软层,所述板体的一侧开设有多个转动槽,多个所述转动槽的一侧固定连接有转动轴,多个所述转动轴的外侧壁套设有连接块,多个所述连接块远离转动轴的一侧固定连接有套杆,多个所述套杆的一侧套设有伸缩杆,多个所述伸缩杆的一侧开设有多个凹槽,多个所述套杆的一端的一侧固定连接有固定块。本技术中,该用于一种多功能手指康复训练机器人,其具有固定手指关节更加稳固的功能,并且其还具有对于固定关节的松紧程度进行调整的功能,以及可以自行进行关节调整活动的功能。
技术研发人员:朱伟,严勇进,孙红英,徐晨
受保护的技术使用者:上海泉涟维康智能科技有限公司
技术研发日:20230508
技术公布日:2024/1/15