三轴上肢康复外骨骼机器人的制作方法
本技术涉及医疗康复器械,具体涉及三轴上肢康复外骨骼机器人。
背景技术:
1、上肢外骨骼康复机器人是一种通过机电一体化技术、传感器技术和控制算法将人工智能技术应用于康复领域的设备。它可以辅助或代替患者进行上肢康复训练,以恢复患者手臂的功能。
2、授权公告号为cn106038175a的专利文件中,公开了一种用于上肢康复训练的关节复合运动机械臂,其中通过带轮和皮带来实现各个机械臂的传动,由于采用皮带进行传动,所有的皮带均需要设置外壳来将皮带进行包裹,这样就导致整个康复装置更加复杂,同时各个机械臂的运动也会更加的笨拙,从而无法更加灵活地对患者进行康复训练。
3、除了上述类型的康复训练器之外,也有通过电机来驱动各机械臂进行移动的,然而该种类型的康复装置通常只设有一个康复臂,使用过程中,仅能针对单个手臂进行训练,部分可以进行左右臂同时康复的装置往往无法有效调节两个康复臂之间的距离,从而在面对体格形体不同的患者时,不能很好地进行装夹匹配,继而影响患者的使用体验。
技术实现思路
1、本实用新型的目的是提供一种三轴上肢康复外骨骼机器人,以解决传统的上肢康复训练装置无法灵活使用的问题。
2、为实现上述目的,本实用新型采用如下技术方案:
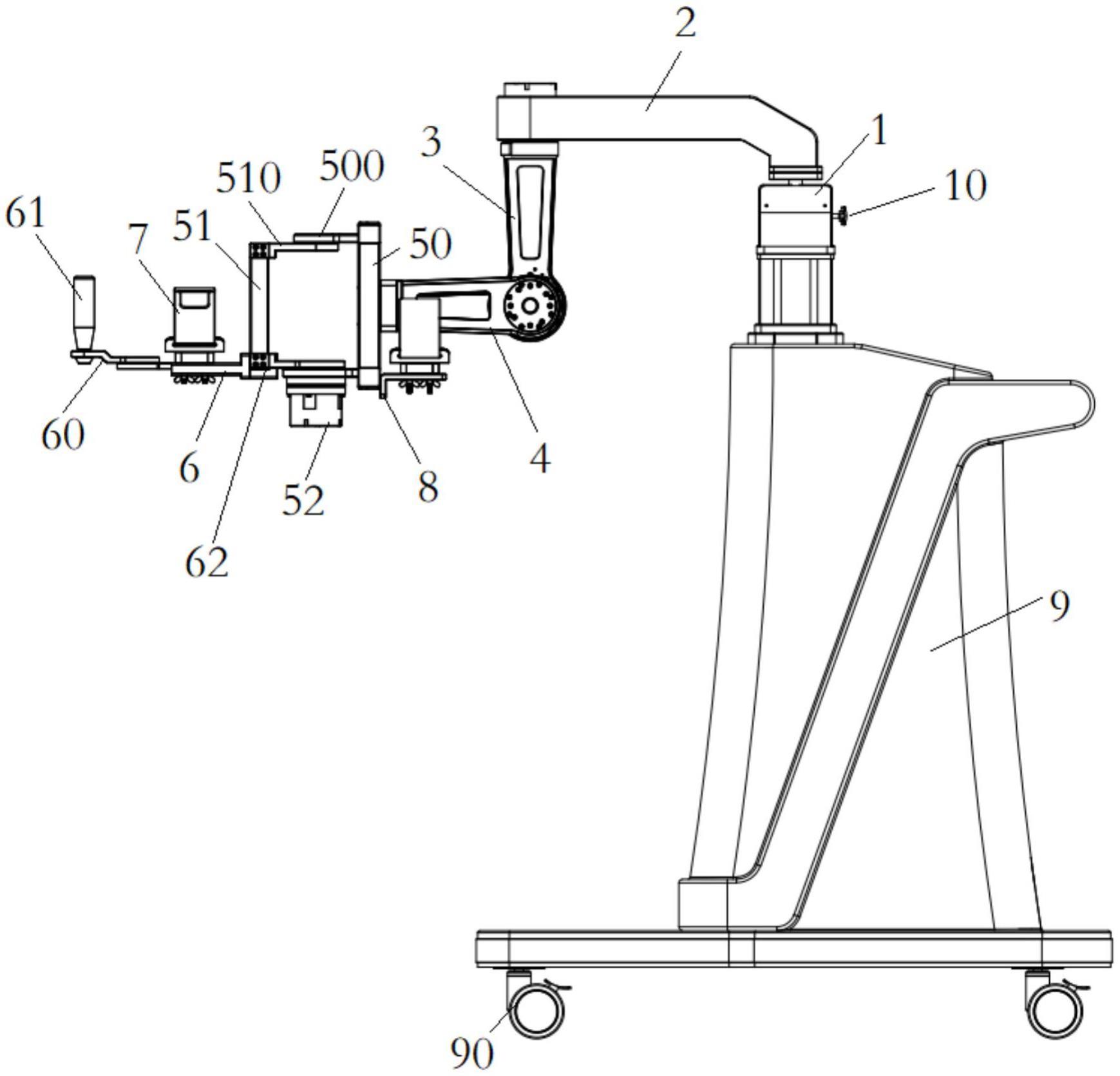
3、三轴上肢康复外骨骼机器人,包括横梁、滑动模组、第一转动模组、第二转动模组、屈轴固定环组件、支撑组件;
4、所述滑动模组横向滑动设置在所述横梁中;
5、所述第一转动模组的一端部与所述滑动模组的一端部于水平方向转动连接;所述第二转动模组的一端部与所述第一转动模组的另一端部于竖直方向转动连接;
6、所述屈轴固定环组件设置在所述第二转动模组的另一端部;所述支撑组件滑动设置在所述屈轴固定环组件的环身;
7、所述屈轴固定环组件上还设有支撑部。
8、进一步地,所述横梁的上侧开设有滑动槽,所述滑动模组的后端滑动设置在所述滑动槽中;
9、所述横梁的后侧壁开设有卡接槽,所述卡接槽与所述滑动槽相互连通;所述横梁上设有用于限位所述滑动模组位置的锁紧旋钮;所述锁紧旋钮穿过所述卡接槽旋设在所述滑动模组中。
10、进一步地,所述第一转动模组呈l型结构;
11、所述第一转动模组的上端与所述滑动模组的前端转动连接;
12、所述滑动模组的前端设有驱使所述第一转动模组转动的第一电机。
13、进一步地,所述第二转动模组的后端与所述第一转动模组的下端转动连接;所述第一转动模组的下端设有用于驱动所述第二转动模组转动的第二电机。
14、进一步地,所述屈轴固定环组件包括半环状结构的大臂固定环和小臂固定环;
15、所述大臂固定环与所述小臂固定环前后间隔设置;
16、所述大臂固定环的端部朝向所述小臂固定环设有第一铰接柄,所述小臂固定环的端部朝向所述大臂固定环设有第二铰接柄,所述第一铰接柄与所述第二铰接柄铰接设置;
17、所述第一铰接柄上设有用于驱动所述小臂固定环相对大臂固定环转动的第三电机。
18、进一步地,所述支撑组件包括用于支撑小臂的臂托;
19、所述小臂固定环上设有弧形卡接槽,所述臂托的后端设有凹槽,所述小臂固定环滑动设置在所述凹槽中,所述凹槽上设有用于限制所述臂托滑动位置的旋紧件,所述旋紧件的一端位于所述弧形卡接槽中。
20、进一步地,所述支撑部设置在所述大臂固定环的后侧,用于支撑大臂。
21、进一步地,所述臂托和所述支撑部上均设有用于固定胳膊的袖带。
22、进一步地,所述臂托的前端转动设有腕托,所述腕托上设有把手。
23、进一步地,所述三轴上肢康复外骨骼机器人还包括主体,所述横梁设置在所述主体的上方,所述主体的下方设有便于移动的滚轮。
24、本实用新型的有益效果:
25、该实用新型中,滑动模组通过滑动卡接的方式设置在横梁上,对于后续同时设置两组滑动模组时,可以基于不同的使用人员进行调整,非常方便;同时第一转动模组、第二转动模组以及屈轴固定环组件均通过电机进行动作,相比传统中采用带轮、皮带传动的康复臂来说,更加灵活,更加人性化。
26、进一步地,臂托可以相对屈轴固定环组件线进行滑动,以在使用过程中调整整个胳膊进行屈轴时的角度,使得使用者具有一个较佳的使用体验;在臂托上设置了袖带,保证用户在康复过程中的舒适度。
技术特征:
1.三轴上肢康复外骨骼机器人,其特征在于:包括横梁、滑动模组、第一转动模组、第二转动模组、屈轴固定环组件、支撑组件;
2.根据权利要求1所述的三轴上肢康复外骨骼机器人,其特征在于:所述横梁的上侧开设有滑动槽,所述滑动模组的后端滑动设置在所述滑动槽中;
3.根据权利要求1所述的三轴上肢康复外骨骼机器人,其特征在于:所述第一转动模组呈l型结构;
4.根据权利要求3所述的三轴上肢康复外骨骼机器人,其特征在于:所述第二转动模组的后端与所述第一转动模组的下端转动连接;
5.根据权利要求1所述的三轴上肢康复外骨骼机器人,其特征在于:所述屈轴固定环组件包括半环状结构的大臂固定环和小臂固定环;
6.根据权利要求5所述的三轴上肢康复外骨骼机器人,其特征在于:所述支撑组件包括用于支撑小臂的臂托;
7.根据权利要求6所述的三轴上肢康复外骨骼机器人,其特征在于:所述支撑部设置在所述大臂固定环的后侧,用于支撑大臂。
8.根据权利要求7所述的三轴上肢康复外骨骼机器人,其特征在于:所述臂托和所述支撑部上均设有用于固定胳膊的袖带。
9.根据权利要求6所述的三轴上肢康复外骨骼机器人,其特征在于:所述臂托的前端转动设有腕托,所述腕托上设有把手。
10.根据权利要求1所述的三轴上肢康复外骨骼机器人,其特征在于:所述三轴上肢康复外骨骼机器人还包括主体,所述横梁设置在所述主体的上方,所述主体的下方设有便于移动的滚轮。
技术总结
本技术涉及三轴上肢康复外骨骼机器人,包括横梁、滑动模组、第一转动模组、第二转动模组、屈轴固定环组件、支撑组件;滑动模组横向滑动设置在横梁中;第一转动模组的一端部与滑动模组的一端部于水平方向转动连接;第二转动模组的一端部与第一转动模组的另一端部于竖直方向转动连接;屈轴固定环组件设置在第二转动模组的另一端部;支撑组件滑动设置在屈轴固定环组件的环身;屈轴固定环组件上还设有支撑部。该技术中,第一转动模组、第二转动模组以及屈轴固定环组件均通过电机进行动作,相比传统中采用带轮、皮带传动的康复臂来说,更加灵活,更加人性化。
技术研发人员:李永良,王前前,侯林锋
受保护的技术使用者:郑州上禾电子科技有限公司
技术研发日:20230510
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!