康复护理机器人的制作方法
本技术涉及机器人,具体是康复护理机器人。
背景技术:
1、机器人是指一种能够半自主或全自主工作的智能机械。机器人能够通过编程模块来执行诸如作业或移动等任务。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量、服务人类生活,扩大或延伸人的活动及能力范围。
2、目前,大多数机器人均具有仿人的特点,机器人所具有的非接触传感器和接触传感器相当于人的五官,这些传感器使机器人能够识别外界环境。根据功能,可将机器人分为:负责生产线操作的工业机器人、用于日常生活的服务机器人以及用于安防领域的特殊机器人。康复护理机器人则属于服务机器人类别中的重要分支。
3、现有的康复护理机器人虽然能对行动不便的人进行行走引导以及提供简单的物品搬移功能,但不能及时处理周围环境中存在的危险因素,且无法为康复中的护理者提供临时休息场所,导致康复护理机器人的护理效果有待进一步的提升和优化,基于此,本实用新型设计了康复护理机器人,以解决上述问题,完善现有康复护理机器人的护理功能。
技术实现思路
1、本实用新型的目的在于提供康复护理机器人,以解决上述提出的现有的康复护理机器人不能及时处理周围环境中存在的危险因素,且无法为康复中的护理者提供临时休息场所的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
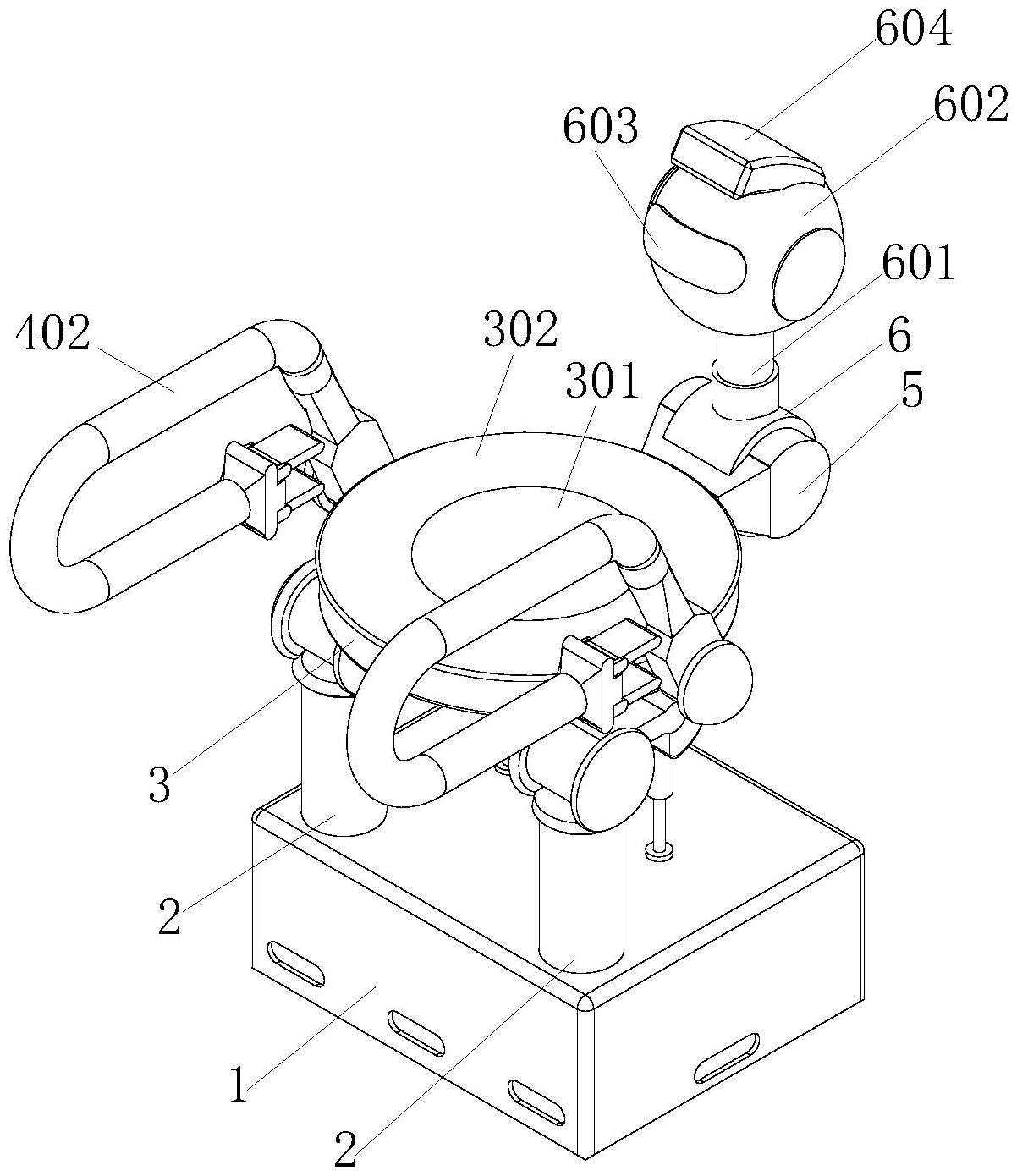
3、康复护理机器人,包括底座组件,用于降低机器人重心;所述底座组件包括行走部件和清洁部件,用于机器人行走及对行走路径的清洁,底座组件为内部安装有高度调节气缸的金属箱,通过高度调节气缸连接支撑及高度调整组件,以调整支撑及高度调整组件的高度,支撑及高度调整组件用于调整机器人高度,支撑及高度调整组件为对称的承重柱,支撑及高度调整组件相切贯穿于金属箱的内部,所述支撑及高度调整组件的顶部通过转动关节一端固定的第一转轴连接转动杆,转动杆的顶部焊接有座椅式机身,座椅式机身可调整为水平放置的座椅,便于康复人员坐下休息,尤其对于康复行走的人员,有利于练习长距离行走,通过提升锻炼时长以及方便患者休息,帮助患者早日康复;座椅式机身的底部安装有控制箱,控制箱的底部安装有对称的伸缩气缸,用于辅助控制箱及支撑座椅式机身的支撑,从而提升康复人员坐下休息的稳定性;机械操作臂组件用于帮扶辅助康复人员行走,所述机械操作臂组件的一端连接有抓手组件;机器人肩部,所述机器人肩部的内部通过驱动轴连接有机械颈,机械颈的顶部通过伸缩部连接有机器人头部,机器人头部包括正面安装的识别摄像头,用于识别行走路径中的物品,便于机器人避开障碍物,识别摄像头同时用于人脸识别、电梯楼层按钮识别、危险姿势识别并报警。
4、作为本实用新型进一步的方案:行走部件包括开设于底座组件底部对称的安装槽,四个所述安装槽的内部分别安装有自锁万向轮,底座组件的侧壁安装有位移传感器,用于探测障碍物距离。
5、作为本实用新型进一步的方案:清洁部件包括安装于底座组件底部的伸缩定位杆,伸缩定位杆的底部固定有清洁电机,清洁电机的输出端连接有盘状清理毛刷,盘状清理毛刷为若干个同心圆的海绵圈,通过盘状清理毛刷旋转接触地面,可对地面上的水渍、油渍进行吸收清洁,避免康复人员滑倒,提升使用的安全性。
6、作为本实用新型进一步的方案:所述伸缩气缸的下端连接有伸缩支撑杆,伸缩支撑杆的底部固定有防滑板,防滑板与底座组件的顶面接触,提升伸缩支撑杆支撑的可靠性。
7、作为本实用新型进一步的方案:所述支撑及高度调整组件包括顶部焊接的第一舵机,第一舵机输出端连接有转动关节,可带动转动关节转动。
8、作为本实用新型进一步的方案:所述座椅式机身的顶部安装有坐板,坐板的边沿胶合连接有防护圈,防护圈为内部填充有海绵的纺织圈,防止康复人员坐下休息时臀部滑出坐板。
9、作为本实用新型进一步的方案:所述机械操作臂组件包括驱动杆以及与所述驱动杆一端固定连接的操作臂,用于帮助康复人员行走以及搬运物品、按压电梯楼层。
10、作为本实用新型进一步的方案:所述抓手组件包括与操作臂一端连接的定位板,定位板的一端连接有一对铰接块,两个铰接块的内壁分别轴连接有抓板,抓板用于抓取物品,定位板的一侧设置有紫外线灯管。
11、作为本实用新型进一步的方案:所述机器人头部的顶部安装有导航模块,用于连接局域网对机器人导航。
12、与现有技术相比,本实用新型的有益效果是:
13、1、本实用新型中,通过设置可调整为水平放置的座椅式机身,便于康复人员坐下休息,尤其对于康复行走的人员,有利于练习长距离行走,通过提升锻炼时长以及方便患者休息,帮助患者早日康复,通过盘状清理毛刷旋转接触地面,可对地面上的水渍、油渍进行吸收清洁,避免康复人员滑倒,提升使用的安全性。
14、2、本实用新型中,通过控制箱的底部安装对称的伸缩气缸,启动伸缩气缸至抵紧底座组件顶部的状态,可用于辅助支撑控制箱及支撑座椅式机身,提升康复人员坐下休息的稳定性。
15、3、本实用新型中,通过设置对称的机械操作臂组件,可帮扶辅助康复人员练习行走,当康复人员坐下休息时,机械操作臂组件则作为扶手,对坐下休息的康复人员提供手扶结构,提升康复人员休息过程的安全性。
技术特征:
1.康复护理机器人,其特征在于,包括:
2.根据权利要求1所述的康复护理机器人,其特征在于:行走部件包括开设于底座组件(1)底部对称的安装槽(101),四个所述安装槽(101)的内部分别安装有自锁万向轮(102),底座组件(1)的侧壁安装有位移传感器(106),用于探测障碍物距离。
3.根据权利要求1所述的康复护理机器人,其特征在于:清洁部件包括安装于底座组件(1)底部的伸缩定位杆(103),伸缩定位杆(103)的底部固定有清洁电机(104),清洁电机(104)的输出端连接有盘状清理毛刷(105),盘状清理毛刷(105)为若干个同心圆的海绵圈。
4.根据权利要求1所述的康复护理机器人,其特征在于:所述伸缩气缸(701)的下端连接有伸缩支撑杆(702),伸缩支撑杆(702)的底部固定有防滑板(703),防滑板(703)与底座组件(1)的顶面接触。
5.根据权利要求1所述的康复护理机器人,其特征在于:所述支撑及高度调整组件(2)包括顶部焊接的第一舵机(201),第一舵机(201)输出端连接有转动关节(203)。
6.根据权利要求1所述的康复护理机器人,其特征在于:所述座椅式机身(3)的顶部安装有坐板(301),坐板(301)的边沿胶合连接有防护圈(302),防护圈(302)为内部填充有海绵的纺织圈。
7.根据权利要求1所述的康复护理机器人,其特征在于:所述机械操作臂组件(4)包括驱动杆(401)以及与所述驱动杆(401)一端固定连接的操作臂(402)。
8.根据权利要求7所述的康复护理机器人,其特征在于:所述抓手组件包括与操作臂(402)一端连接的定位板(403),定位板(403)的一端连接有一对铰接块(404),两个铰接块(404)的内壁分别轴连接有抓板(405)。
9.根据权利要求1所述的康复护理机器人,其特征在于:所述机器人头部(602)的顶部安装有导航模块(604)。
技术总结
本技术公开了机器人技术领域的康复护理机器人,包括底座组件,用于降低机器人重心;所述底座组件包括行走部件和清洁部件,底座组件为内部安装有高度调节气缸的金属箱,支撑及高度调整组件用于调整机器人高度,所述支撑及高度调整组件的顶部通过转动关节一端固定的第一转轴连接转动杆,转动杆的顶部焊接有座椅式机身。本技术中通过设置可调整为水平放置的座椅式机身,便于康复人员坐下休息,尤其对于康复行走的人员,有利于练习长距离行走,通过提升锻炼时长以及方便患者休息,帮助患者早日康复,通过盘状清理毛刷旋转接触地面,可对地面上的水渍、油渍进行吸收清洁,避免康复人员滑倒,提升使用的安全性。
技术研发人员:许春,赵芳
受保护的技术使用者:上海奥莆奇智能科技有限公司
技术研发日:20230531
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!