用于血管介入手术的导丝及血管介入手术机器人的制作方法
本技术涉及医疗设备,具体而言,涉及一种用于血管介入手术的导丝及血管介入手术机器人。
背景技术:
1、在血管介入手术中,导丝是必不可少的医疗器械,其作用包括:
2、a、引导并支持导管通过皮下组织、动脉壁等软组织,经穿刺孔进入血管;
3、b、引导导管通过迂曲、硬化的血管,选择性或超选择进入检查的血管分支;
4、c、加强导管硬度,利于操纵导管;
5、d、作交换导管用,头端柔软可减少导管对血管的损伤。
6、相关技术中为更好地推送导丝,采用在导丝的前端安装具有监测功能的电子器件来反馈导丝的推送情况。由于电子器件均为刚性结构,导致导丝的前端也呈现为刚性。在导丝推送的过程中,刚性的前端容易在推送方向上挤压血管壁,造成血管损伤。
技术实现思路
1、本实用新型的主要目的在于提供一种用于血管介入手术的导丝,以解决相关技术中安装有电子器件的导丝在推送过程中,刚性的前端容易在推送方向上过于挤压血管壁,造成血管损伤的问题。
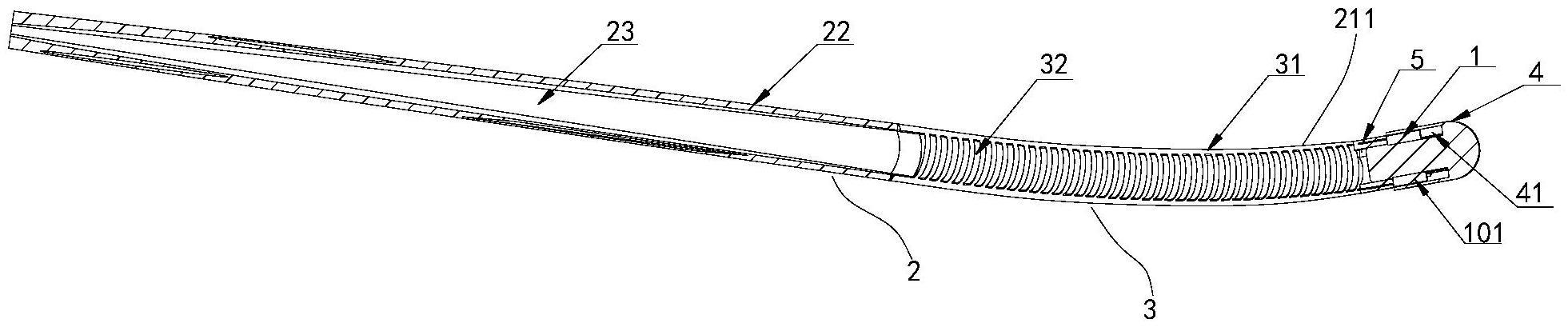
2、为了实现上述目的,本实用新型提供了一种用于血管介入手术的导丝,该用于血管介入手术的导丝包括:
3、介入主体;
4、柔性连接段,设于所述介入主体的靠近介入端的一侧,所述柔性连接段可相对于所述介入主体的轴向偏移和/或可相对于所述介入主体的轴向收缩;
5、安装段,设于所述柔性连接段的靠近介入端的一侧;
6、电子器件,设于所述安装段上。
7、进一步的,电子器件设置为超声阵元或压力传感器。
8、进一步的,超声阵元设置为若干个并沿所述安装段的周向布置。
9、进一步的,超声阵元设置成能够沿朝向血管壁的方向发射超声波并接收回波以测得检测点与血管壁之间的距离。
10、进一步的,安装段上设置有环形空腔,所述超声阵元设置在所述环形空腔中,并且所述超声阵元的两侧分别与所述环形空腔的两个侧壁抵接。
11、进一步的,柔性连接段包括柔性内芯和第一亲水层,所述第一亲水层包覆在所述柔性内芯的外周上,所述超声阵元的信号线缆穿设于所述第一亲水层中。
12、进一步的,柔性内芯为螺旋状的金属件。
13、进一步的,介入主体包括金属内芯和第二亲水层,所述第二亲水层包覆在所述金属内芯的外周上,所述超声阵元的信号线缆还穿设于所述第二亲水层中,所述柔性内芯的两端分别与所述安装段和所述金属内芯相连。
14、进一步的,第一亲水层和所述第二亲水层一体设置。
15、根据本申请的另一方面,提供一种血管介入手术机器人,包括机器人主体以及与所述机器人主体相连的导丝,所述导丝为上述的导丝。
16、在本实用新型实施例中,通过设置介入主体、柔性连接段和电子器件;并将柔性连接段设于所述介入主体的靠近介入端的一侧,所述柔性连接段可相对于所述介入主体的轴向偏移和/或可相对于所述介入主体的轴向收缩;安装段设于所述柔性连接段的靠近介入端的一侧;电子器件设于所述安装段上,达到了在介入主体推送的过程中,当安装有电子器件的安装段与血管壁相抵时,可利用柔性连接段的形变来吸收多余的推力的目的,从而实现了避免刚性的安装段对血管壁造成较大的挤压,消除安装段对血管的损伤,提升使用安全性的技术效果,进而解决了相关技术中安装有电子器件的导丝在推送过程中,刚性的前端容易在推送方向上过于挤压血管壁,造成血管损伤的问题。
技术特征:
1.一种用于血管介入手术的导丝,其特征在于,包括:
2.根据权利要求1所述的用于血管介入手术的导丝,其特征在于:所述电子器件设置为超声阵元或压力传感器。
3.根据权利要求2所述的用于血管介入手术的导丝,其特征在于:所述超声阵元设置为若干个并沿所述安装段的周向布置。
4.根据权利要求3所述的用于血管介入手术的导丝,其特征在于:所述超声阵元设置成能够沿朝向血管壁的方向发射超声波并接收回波以测得检测点与血管壁之间的距离。
5.根据权利要求3所述的用于血管介入手术的导丝,其特征在于:所述安装段上设置有环形空腔,所述超声阵元设置在所述环形空腔中,并且所述超声阵元的两侧分别与所述环形空腔的两个侧壁抵接。
6.根据权利要求3至5任一项所述的用于血管介入手术的导丝,其特征在于:所述柔性连接段包括柔性内芯和第一亲水层,所述第一亲水层包覆在所述柔性内芯的外周上,所述超声阵元的信号线缆穿设于所述第一亲水层中。
7.根据权利要求6所述的用于血管介入手术的导丝,其特征在于:所述柔性内芯为螺旋状的金属件。
8.根据权利要求6所述的用于血管介入手术的导丝,其特征在于:所述介入主体包括金属内芯和第二亲水层,所述第二亲水层包覆在所述金属内芯的外周上,所述超声阵元的信号线缆还穿设于所述第二亲水层中,所述柔性内芯的两端分别与所述安装段和所述金属内芯相连。
9.根据权利要求8所述的用于血管介入手术的导丝,其特征在于:所述第一亲水层和所述第二亲水层一体设置。
10.一种血管介入手术机器人,其特征在于,包括机器人主体以及与所述机器人主体相连的导丝,所述导丝为权利要求1至9任一项所述的导丝。
技术总结
本技术涉及医疗设备技术领域,具体公开了一种用于血管介入手术的导丝,包括:介入主体;柔性连接段,设于介入主体的靠近介入端的一侧,柔性连接段可相对于介入主体的轴向偏移和/或可相对于介入主体的轴向收缩;安装段,设于柔性连接段的靠近介入端的一侧;电子器件,设于安装段上。本技术能够在介入主体推送的过程中,当安装有电子器件的安装段与血管壁相抵时,可利用柔性连接段的形变吸收多余的推力,从而实现了避免刚性的安装段对血管壁造成较大的挤压,消除安装段对血管的损伤,提升使用安全性的技术效果,进而解决了相关技术中安装有电子器件的导丝在推送过程中,刚性的前端容易在推送方向上过于挤压血管壁,造成血管损伤的问题。
技术研发人员:请求不公布姓名
受保护的技术使用者:北京万思医疗器械有限公司
技术研发日:20230531
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!