一种康复床四肢训练机构的制作方法
本技术涉及康复护理床,具体地说是一种结构简单、使用方便、康复效果好、成本低、能实现小腿弯曲、大腿弯曲、大腿和小腿的外扩动作的康复床四肢训练机构。
背景技术:
1、众所周知,康复轮椅床,是行动不方便的失能病人或半失能病人在住院或居家护理时使用的病床;例如,对于瘫痪、术后、各种生理问题需要卧床或者其他行动不便的用户,合适的护理床有助于病人的康复。
2、目前,现有的康复轮椅床一般都是只包括四个活动板,四个活动板包括小腿板、脚板、臀部板、背板,脚板、小腿板、臀部板、背板相互依次铰接,通过四个板的翻转实现了膝盖部位的弯曲、腰部弯曲和脚部的弯曲,能由平躺状态变成座椅状态,也能由座椅状态变成平躺状态,但是,对于失能或半失能的病人来说,其除了平躺和座椅的两种状态外,还需要进行康复训练,现有的腿部训练器,一般都是通过小腿和大腿的弯曲实现康复训练,但是并不能实现大腿的外扩功能,而且整个结构比较复杂,一般都是通过单独的底板,底板上再安装小腿支撑盒大腿支撑件,底板上有滑轨,驱动器连接滑块,滑块在滑轨上移动,滑块与小腿板或大腿板连接,通过驱动器带动滑块移动,进而带动腿部的弯曲,结构复杂,制备成本高。
技术实现思路
1、本实用新型的目的是解决上述现有技术的不足,提供一种结构简单、使用方便、康复效果好、成本低、能实现小腿小臂弯曲、大腿大臂弯曲、大腿大臂和小腿小臂的外扩动作的康复床四肢训练机构。
2、本实用新型解决其技术问题所采用的技术方案是:
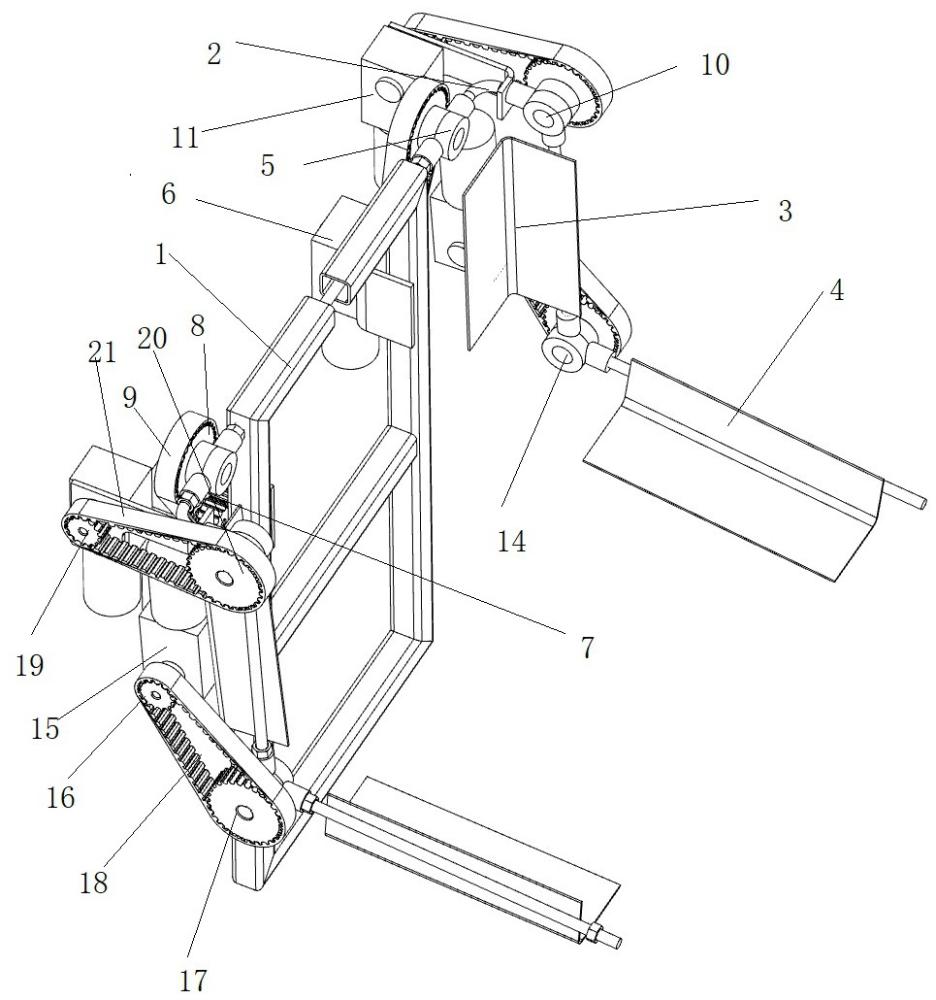
3、一种康复床四肢训练机构,其特征在于该机构包括臀背支撑架、胯肩连接臂、大腿臂支撑架、小腿臂支撑架,臀背支撑架的左右两侧分别经轴承组件与胯肩连接臂连接,胯肩连接臂经轴承组件与大腿臂支撑架连接,大腿臂支撑架经轴承组件与小腿臂支撑架连接,臀背支撑架与胯部连接部之间、胯肩连接臂与大腿臂支撑架之间、大腿臂支撑架与小腿臂支撑架之间分别设有驱动相邻的两个部件之间旋转的旋转驱动器,旋转驱动器分别固定在两个部件之间带动两个部件之间的旋转,胯肩连接臂的一端位于人体的臀部或肩膀下方,胯肩连接臂的另一端位于与人体的臀部或肩膀侧面。
4、本实用新型所述的胯肩连接臂设为弧形,弧形胯肩连接臂两端连接的轴承组件的轴线对应在人体的胯关节或肩关节部位。
5、本实用新型所述的臀背支撑架与胯肩连接臂之间的轴承组件为第一上轴承和第一下轴承,所述的第一上轴承和第二下轴承转动连接,所述的臀背支撑架与第一上轴承固定连接,胯肩连接臂与第一下轴承固定连接,臀背支撑架与胯部支撑架之间经第一旋转驱动器连接。
6、本实用新型所述的第一旋转驱动器包括第一旋转电机、第一主动齿轮、第一从动齿轮、第一齿带,第一从动齿轮连接在第一下轴承上,所述的第一旋转电机固定在臀背支撑架上,第一旋转电机的输出轴与第一主动齿轮连接,第一主动齿轮与第一从动齿轮套有第一齿带,第一旋转电机带动第一主动齿轮旋转,第一齿带带动第一从动齿轮旋转,进而带动第一下轴承旋转,第一下轴承带动胯肩连接臂旋转实现腿臂部的外扩动作。
7、本实用新型所述的胯肩连接臂与大腿臂支撑架之间的轴承组件为第二上轴承和第二下轴承,第二上轴承和第二下轴承转动连接,所述的胯肩连接臂与第二上轴承固定连接,大腿臂支撑架与第二下轴承固定连接,胯肩连接臂和大腿臂支撑架之间经第二旋转驱动器连接。
8、本实用新型所述的第二旋转驱动器包括第二旋转电机、第一连杆、第二连杆,所述的第二旋转电机固定在第二上轴承上,第二旋转电机的输出轴与第一连杆连接,第一连杆与第二连杆经销轴转动连接,第二连杆与大腿臂支撑架之间经销轴转动连接,通过第二驱动器带动大腿臂的弯曲。
9、本实用新型所述的大腿臂支撑架和小腿臂支撑架之间的轴承组件为第三上轴承和第三下轴承,第三上轴承与第三下轴承转动连接,所述的大腿臂支撑架与第三上轴承固定连接,小腿臂支撑架与第三下轴承固定连接,大腿臂支撑架和小腿臂支撑架之间经第三旋转驱动器连接。
10、本实用新型所述的第三旋转驱动器包括第三旋转电机、第三主动齿轮、第三从动齿轮、第三皮带,第三从动齿轮连接在第三下轴承上,所述的第三旋转电机固定在大腿臂支撑架上,第三旋转电机的输出轴与第三主动齿轮连接,第三主动齿轮与第三从动齿轮套有第三齿带,第三旋转电机带动第三主动齿轮旋转,第三齿带带动第三从动齿轮旋转,进而带动第三下轴承喜欢转,第三下轴承带动小腿臂实现弯曲动作。
11、本实用新型所述的第二旋转驱动器包括第二旋转电机、第二主动齿轮、第二从动齿轮、第二齿带,第二从动齿轮连接在第二下轴承上,第二旋转电机固定在第二上轴承上,第二旋转电机固定在胯肩连接臂上,第二旋转电机的出输出轴与第二主动齿轮连接,第二主动齿轮与第二从动齿轮套有第二齿带,第二三旋转电机带动第二主动齿轮旋转,第二齿带带动第二从动齿轮旋转,进而带动第二下轴承旋转,第二下轴承带动大腿臂实现弯曲动作。
12、本实用新型所述的臀背支撑架、胯肩连接臂、大腿臂支撑架、小腿臂支撑架上分别设有固定人体的绷带。
13、本实用新型由于采用上述结构,具有结构简单、使用方便、康复效果好、成本低、能实现小腿弯曲、大腿弯曲、大腿和小腿的外扩动作、大臂的弯曲、小臂的弯曲、大臂和小臂的外扩动作等优点。
技术特征:
1.一种康复床四肢训练机构,其特征在于该机构包括臀背支撑架、胯肩连接臂、大腿臂支撑架、小腿臂支撑架,臀背支撑架的左右两侧分别经轴承组件与胯肩连接臂连接,胯肩连接臂经轴承组件与大腿臂支撑架连接,大腿臂支撑架经轴承组件与小腿臂支撑架连接,臀背支撑架与胯部连接部之间、胯肩连接臂与大腿臂支撑架之间、大腿臂支撑架与小腿臂支撑架之间分别设有驱动相邻的两个部件之间旋转的旋转驱动器,旋转驱动器分别固定在两个部件之间带动两个部件之间的旋转,胯肩连接臂的一端位于人体的臀部或肩膀下方,胯肩连接臂的另一端位于与人体的臀部或肩膀侧面。
2.根据权利要求1所述的一种康复床四肢训练机构,其特征在于所述的胯肩连接臂设为弧形,弧形胯肩连接臂两端连接的轴承组件的轴线对应在人体的胯关节或肩关节部位。
3.根据权利要求1所述的一种康复床四肢训练机构,其特征在于所述的臀背支撑架与胯肩连接臂之间的轴承组件为第一上轴承和第一下轴承,所述的第一上轴承和第二下轴承转动连接,所述的臀背支撑架与第一上轴承固定连接,胯肩连接臂与第一下轴承固定连接,臀背支撑架与胯部支撑架之间经第一旋转驱动器连接。
4.根据权利要求3所述的一种康复床四肢训练机构,其特征在于所述的第一旋转驱动器包括第一旋转电机、第一主动齿轮、第一从动齿轮、第一齿带,第一从动齿轮连接在第一下轴承上,所述的第一旋转电机固定在臀背支撑架上,第一旋转电机的输出轴与第一主动齿轮连接,第一主动齿轮与第一从动齿轮套有第一齿带,第一旋转电机带动第一主动齿轮旋转,第一齿带带动第一从动齿轮旋转,进而带动第一下轴承旋转,第一下轴承带动胯肩连接臂旋转实现腿臂部的外扩动作。
5.根据权利要求1所述的一种康复床四肢训练机构,其特征在于所述的胯肩连接臂与大腿臂支撑架之间的轴承组件为第二上轴承和第二下轴承,第二上轴承和第二下轴承转动连接,所述的胯肩连接臂与第二上轴承固定连接,大腿臂支撑架与第二下轴承固定连接,胯肩连接臂和大腿臂支撑架之间经第二旋转驱动器连接。
6.根据权利要求5所述的一种康复床四肢训练机构,其特征在于所述的第二旋转驱动器包括第二旋转电机、第一连杆、第二连杆,所述的第二旋转电机固定在第二上轴承上,第二旋转电机的输出轴与第一连杆连接,第一连杆与第二连杆经销轴转动连接,第二连杆与大腿臂支撑架之间经销轴转动连接,通过第二驱动器带动大腿臂的弯曲。
7.根据权利要求1所述的一种康复床四肢训练机构,其特征在于所述的大腿臂支撑架和小腿臂支撑架之间的轴承组件为第三上轴承和第三下轴承,第三上轴承与第三下轴承转动连接,所述的大腿臂支撑架与第三上轴承固定连接,小腿臂支撑架与第三下轴承固定连接,大腿臂支撑架和小腿臂支撑架之间经第三旋转驱动器连接。
8.根据权利要求7所述的一种康复床四肢训练机构,其特征在于所述的第三旋转驱动器包括第三旋转电机、第三主动齿轮、第三从动齿轮、第三皮带,第三从动齿轮连接在第三下轴承上,所述的第三旋转电机固定在大腿臂支撑架上,第三旋转电机的输出轴与第三主动齿轮连接,第三主动齿轮与第三从动齿轮套有第三齿带,第三旋转电机带动第三主动齿轮旋转,第三齿带带动第三从动齿轮旋转,进而带动第三下轴承喜欢转,第三下轴承带动小臂腿实现弯曲动作。
9.根据权利要求5所述的一种康复床四肢训练机构,其特征在于所述的第二旋转驱动器包括第二旋转电机、第二主动齿轮、第二从动齿轮、第二齿带,第二从动齿轮连接在第二下轴承上,第二旋转电机固定在第二上轴承上,第二旋转电机固定在胯肩连接臂上,第二旋转电机的出输出轴与第二主动齿轮连接,第二主动齿轮与第二从动齿轮套有第二齿带,第二三旋转电机带动第二主动齿轮旋转,第二齿带带动第二从动齿轮旋转,进而带动第二下轴承旋转,第二下轴承带动大腿臂实现弯曲动作。
10.根据权利要求1所述的一种康复床四肢训练机构,其特征在于所述的臀背支撑架、胯肩连接臂、大腿臂支撑架、小腿臂支撑架上分别设有固定人体的绷带。
技术总结
本技术涉及康复护理床技术领域,具体地说是一种康复床四肢训练机构,该机构包括臀背支撑架、胯肩连接臂、大腿臂支撑架、小腿臂支撑架,臀背支撑架的左右两侧分别经轴承组件与胯肩连接臂连接,胯肩连接臂经轴承组件与大腿臂支撑架连接,大腿臂支撑架经轴承组件与小腿臂支撑架连接,臀背支撑架与胯部连接部之间、胯肩连接臂与大腿臂支撑架之间、大腿臂支撑架与小腿臂支撑架之间分别设有驱动相邻的两个部件之间旋转的旋转驱动器,旋转驱动器分别固定在两个部件之间带动两个部件之间的旋转,具有结构简单、使用方便、康复效果好、成本低、能实现小腿弯曲、大腿弯曲、大腿和小腿的外扩动作、大臂的弯曲、小臂的弯曲、大臂和小臂的外扩动作等优点。
技术研发人员:孙正鼐,宋再军,王令军
受保护的技术使用者:百福泰(青岛)防护科技有限公司
技术研发日:20230615
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!