介入手术机器人的制作方法
本技术涉及医疗器械,特别涉及一种介入手术机器人。
背景技术:
1、目前,介入手术机器人的机器人主体与耗材盒之间多设置无菌膜(无菌薄膜),以实现机器人主体与耗材盒的无菌隔离。无菌膜包括自带孔或者不带孔两种结构。采用自带孔的无菌膜时,若无菌膜的孔位未与机器人主体和耗材盒传输部对齐,则机器人主体与耗材盒传输部无法安装到位,不便对准;若无菌膜的孔位比传输部大很多时,虽然方便对准,但不利于机器人主体与耗材盒无菌隔离。采用不带孔的无菌膜时,则需要借助其他工具扎孔,容易造成无菌膜的污染,不利于机器人主体与耗材盒的无菌隔离,操作过程繁琐。
2、因此,如何降低无菌膜的安装难度,成为本领域技术人员亟待解决的技术问题。
技术实现思路
1、本实用新型提出了一种介入手术机器人,以降低无菌膜的安装难度。
2、为了实现上述目的,本实用新型提供如下技术方案:
3、本实用新型公开了一种介入手术机器人,包括耗材盒和机器人主体,其中,耗材盒具有第一传输部,机器人主体具有第二传输部,机器人主体与耗材盒的对接侧用于设置无菌膜;
4、第一传输部位于耗材盒的对接侧的一端或者第二传输部位于机器人主体的对接侧的一端设置有刺破部,耗材盒与机器人主体对接时,刺破部刺破无菌膜;
5、耗材盒与机器人主体对接到位时,第一传输部与第二传输部传动连接。
6、可选的,本实用新型的介入手术机器人中,第一传输部包括第一传输段和第二传输段,第一传输段远离第二传输部的一端设置有传动齿轮,其另一端与第二传输段可拆卸连接,刺破部位于第二传输段远离第一传输段的一端。
7、可选的,本实用新型的介入手术机器人中,刺破部为圆锥结构。
8、可选的,本实用新型的介入手术机器人中,第一传输段靠近第二传输段的部位设置有第一插接部,第二传输段靠近第一传输段的部位设置有第二插接部,第一插接部和第二插接部插接配合以使第一传输段与第二传输段传动连接。
9、可选的,本实用新型的介入手术机器人中,第一插接部为六棱孔,第二插接部为与六棱孔相配合的六棱柱结构。
10、可选的,本实用新型的介入手术机器人中,第二传输部靠近第一传输部的一端设置有第一传动部,第一传输部远离第二传输段的部位设置有第二传动部,第一传动部能够与第二传动部接合以使第二传输部与第一传输部传动连接。
11、可选的,本实用新型的介入手术机器人中,第一传动部为设置于第二传输部端部的齿槽,第二传动部为设置于第一传输部外周的传动齿,传动齿能够与齿槽接合。
12、可选的,本实用新型的介入手术机器人中,齿槽的顶面与机器人主体的对接面的距离l满足:l>d/2,其中,d为第二传输段的最大外径。
13、可选的,本实用新型的介入手术机器人中,第二传输部沿对接方向从机器人主体的壳体外侧可拆卸的设置于机器人主体上。
14、可选的,本实用新型的介入手术机器人中,机器人主体的壳体上设置有安装孔;第二传输部靠近第一传输部的一端设置有搭接沿,搭接沿搭接在安装孔的边缘。
15、可选的,本实用新型的介入手术机器人中,介入手术机器人还包括用于压紧无菌膜且位于刺破部周围区域的压膜器。
16、可选的,本实用新型的介入手术机器人中,压膜器包括套设在第一传输部外周的压紧套和弹性件,压紧套可滑动地设置在耗材盒的壳体上;弹性件的一端与第一传输部或者耗材盒的壳体相抵,弹性件的另一端与压紧套相抵,在耗材盒与机器人主体对接时,压紧套最先接触无菌膜,并且机器人主体能够推动压紧套移动并因此挤压弹性件收缩,以使压紧套向耗材盒的壳体内移动。
17、可选的,本实用新型的介入手术机器人中,压紧套远离机器人主体的一端设置有弹性仓,弹性件能够被挤压至弹性仓内。
18、可选的,本实用新型的介入手术机器人中,压紧套中部设置有第一限位部,耗材盒的壳体上或者第一传输部设置有与第一限位部抵接的第二限位部;压紧套未受到机器人主体的挤压作用时,第一限位部与第二限位部在弹性件的弹力作用下抵接,刺破部全部位于压紧套内。
19、可选的,本实用新型的介入手术机器人中,压紧套靠近机器人主体的一端的端面设置有向外凸出的固膜凸台。
20、可选的,本实用新型的介入手术机器人中,固膜凸台为多个,多个固膜凸台围绕至少一个圆布置;不同的圆同心布置。
21、可选的,本实用新型的介入手术机器人中,机器人主体的对接侧设置有与压膜器相配合的导向槽。
22、可选的,本实用新型的介入手术机器人中,机器人主体包括驱动盒,第二传输部与驱动盒的输出轴传动连接;或者第二传输部为驱动盒的输出轴。
23、可选的,本实用新型的介入手术机器人中,第二传输部和第一传输部的数量均为两个,且第一传输部和第二传输部一一对应连接。
24、可选的,本实用新型的介入手术机器人中,介入手术机器人还包括卡扣组件,卡扣组件设置于机器人主体上,并配置有实现机器人主体与耗材盒连接的锁紧位和实现机器人主体与耗材盒的解除连接的解锁位。
25、由上述技术方案可以看出,本实用新型实施例的介入手术机器人组装时,将无菌膜覆盖在机器人主体上,以使其对接处的部分平铺在机器人主体的对接侧,对齐第一传动轴和第二传动轴;施加外力以对接机器人主体和耗材盒,刺破部率先接触无菌膜并在外力持续增加时刺破无菌膜;继续施加外力直至机器人主体和耗材盒对接到位,第一传输部与第二传输部传动连接。由于本实用新型实施例中的介入手术机器人在对接过程中,无需借助介入手术机器人以外的工具刺破无菌膜,因此,能够降低无菌膜被污染的风险,简化耗材盒的安装过程。
技术特征:
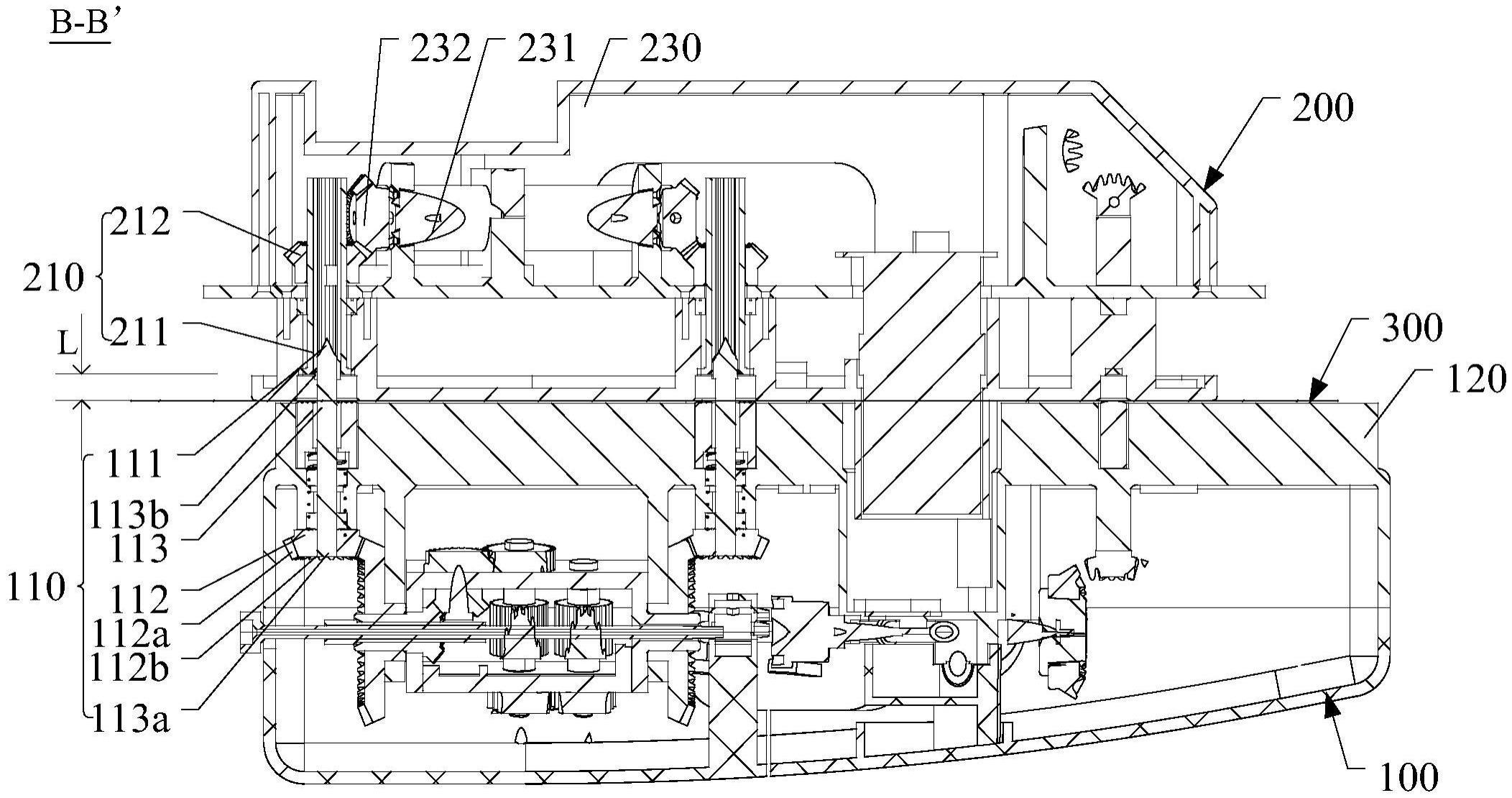
1.一种介入手术机器人,其特征在于,包括耗材盒(100)和机器人主体(200),其中,所述耗材盒(100)具有第一传输部(110),所述机器人主体(200)具有第二传输部(210),所述机器人主体(200)与所述耗材盒(100)的对接侧用于设置无菌膜(300);
2.如权利要求1所述的介入手术机器人,其特征在于,所述第一传输部(110)包括第一传输段(112)和第二传输段(113),所述第一传输段(112)远离所述第二传输部(210)的一端设置有传动齿轮(112a),其另一端与所述第二传输段(113)可拆卸连接,所述刺破部(111)位于所述第二传输段(113)远离所述第一传输段(112)的一端。
3.如权利要求2所述的介入手术机器人,其特征在于,所述刺破部(111)为圆锥结构。
4.如权利要求2所述的介入手术机器人,其特征在于,所述第一传输段(112)靠近所述第二传输段(113)的部位设置有第一插接部(112b),所述第二传输段(113)靠近所述第一传输段(112)的部位设置有第二插接部(113a),所述第一插接部(112b)和所述第二插接部(113a)插接配合以使所述第一传输段(112)与所述第二传输段(113)传动连接。
5.如权利要求4所述的介入手术机器人,其特征在于,所述第一插接部(112b)为六棱孔,所述第二插接部(113a)为与所述六棱孔相配合的六棱柱结构。
6.如权利要求2所述的介入手术机器人,其特征在于,所述第二传输部(210)靠近所述第二传输段(113)的一端设置有第一传动部(211),所述第一传输部(110)靠近所述第二传输部(210)的部位设置有第二传动部(113b),所述第一传动部(211)能够与所述第二传动部(113b)接合以使所述第二传输部(210)与所述第一传输部(110)传动连接。
7.如权利要求6所述的介入手术机器人,其特征在于,所述第一传动部(211)为设置于所述第二传输部(210)端部的齿槽(211a),所述第二传动部(113b)为设置于所述第二传输部(210)外周的传动齿,所述传动齿能够与所述齿槽(211a)接合。
8.如权利要求7所述的介入手术机器人,其特征在于,所述齿槽(211a)的顶面与所述机器人主体(200)的对接面的距离l满足:l>d/2,其中,d为所述第二传输段(113)的最大外径。
9.如权利要求1所述的介入手术机器人,其特征在于,所述第二传输部(210)沿对接方向从所述机器人主体(200)的壳体外侧可拆卸的设置于所述机器人主体(200)上。
10.如权利要求9所述的介入手术机器人,其特征在于,所述机器人主体(200)的壳体上设置有安装孔;所述第二传输部(210)靠近所述第一传输部(110)的一端设置有搭接沿(213),所述搭接沿(213)搭接在所述安装孔的边缘。
11.如权利要求1至10中任一项所述的介入手术机器人,其特征在于,所述介入手术机器人还包括用于压紧所述无菌膜(300)且位于所述刺破部(111)周围区域的压膜器(400)。
12.如权利要求11所述的介入手术机器人,其特征在于,所述压膜器(400)包括套设在所述第一传输部(110)外周的压紧套(410)和弹性件(420),所述压紧套(410)可滑动地设置在所述耗材盒(100)的壳体上;所述弹性件(420)的一端与所述第一传输部(110)或者所述耗材盒(100)的壳体相抵,所述弹性件(420)的另一端与所述压紧套(410)相抵,在所述耗材盒(100)与所述机器人主体(200)对接时,所述压紧套(410)最先接触所述无菌膜(300),并且所述机器人主体(200)能够推动所述压紧套(410)移动并因此挤压所述弹性件(420)收缩,以使所述压紧套(410)向所述耗材盒(100)的壳体内移动。
13.如权利要求12所述的介入手术机器人,其特征在于,所述压紧套(410)远离所述机器人主体(200)的一端设置有弹性仓(411),所述弹性件(420)能够被挤压至所述弹性仓(411)内。
14.如权利要求13所述的介入手术机器人,其特征在于,所述压紧套(410)中部设置有第一限位部(412),所述耗材盒(100)的壳体上或者所述第一传输部(110)设置有与所述第一限位部(412)抵接的第二限位部(114);所述压紧套(410)未受到所述机器人主体(200)的挤压作用时,所述第一限位部(412)与所述第二限位部(114)在所述弹性件(420)的弹力作用下抵接,所述刺破部(111)全部位于所述压紧套(410)内。
15.如权利要求12所述的介入手术机器人,其特征在于,所述压紧套(410)靠近所述机器人主体(200)的一端的端面设置有向外凸出的固膜凸台(413)。
16.如权利要求15所述的介入手术机器人,其特征在于,所述固膜凸台(413)为多个,多个所述固膜凸台(413)围绕至少一个圆布置;不同的圆同心布置。
17.如权利要求11所述的介入手术机器人,其特征在于,所述机器人主体(200)的对接侧设置有与所述压膜器(400)相配合的导向槽(220)。
18.如权利要求1至10中任一项所述的介入手术机器人,其特征在于,所述机器人主体(200)包括驱动盒(230),所述第二传输部(210)与所述驱动盒(230)的输出轴传动连接;或者所述第二传输部(210)为所述驱动盒(230)的输出轴。
19.如权利要求18所述的介入手术机器人,其特征在于,所述第二传输部(210)和所述第一传输部(110)的数量均为两个,且所述第一传输部(110)和所述第二传输部(210)一一对应连接。
20.如权利要求1至10中任一项所述的介入手术机器人,其特征在于,所述介入手术机器人还包括卡扣组件(500),所述卡扣组件(500)设置于所述机器人主体(200)上,并配置有实现所述机器人主体(200)与所述耗材盒(100)连接的锁紧位和实现所述机器人主体(200)与所述耗材盒(100)的解除连接的解锁位。
技术总结
本技术涉及医疗器械技术领域,具体公开了一种介入手术机器人,包括耗材盒和机器人主体,耗材盒具有第一传输部,机器人主体具有第二传输部,机器人主体与耗材盒的对接侧用于设置无菌膜;第一传输部位于耗材盒的对接侧的一端或者第二传输部位于机器人主体的对接侧的一端设置有刺破部,耗材盒与机器人主体对接时,刺破部刺破无菌膜;耗材盒与机器人主体对接到位时,第一传输部与第二传输部传动连接。由于本技术实施例中的介入手术机器人在对接过程中,无需借助介入手术机器人以外的工具刺破无菌膜,因此,能够降低无菌膜被污染的风险,简化耗材盒的安装过程。
技术研发人员:请求不公布姓名
受保护的技术使用者:北京万思医疗器械有限公司
技术研发日:20230619
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!