一种底座结构的制作方法
本申请涉及医疗机器人,更具体地,涉及一种用于安装从端机器人的底座结构。
背景技术:
1、由于血管介入手术过程中会对术者造成辐射的影响,因此目前其中一种解决方式为采用血管介入机器人进行远程手术,常规的方式会使用机械臂固定从端机器人,通过控制机械臂调节从端机器人的初始安装位置,以满足不同的临床需求。
2、对于老款的数字减影血管造影手术床(dsa床)而言,老款dsa床调节长度有限,且手术室内空间小,通常机械臂无法直接准确安装到目标位置,需要多次调节机械臂的位置。而现有的机械臂装设在手术床以后将被固定锁紧,底座无法相对手术床移动,因此,机械臂安装后无法相对手术床调节,不便于医生进行手术。
技术实现思路
1、本申请实施例所要解决的技术问题是现有的机械臂底座安装后固定锁紧,无法相对手术床调节,不便于手术的进行。
2、为了解决上述技术问题,本申请实施例提供一种底座结构,采用了如下所述的技术方案:
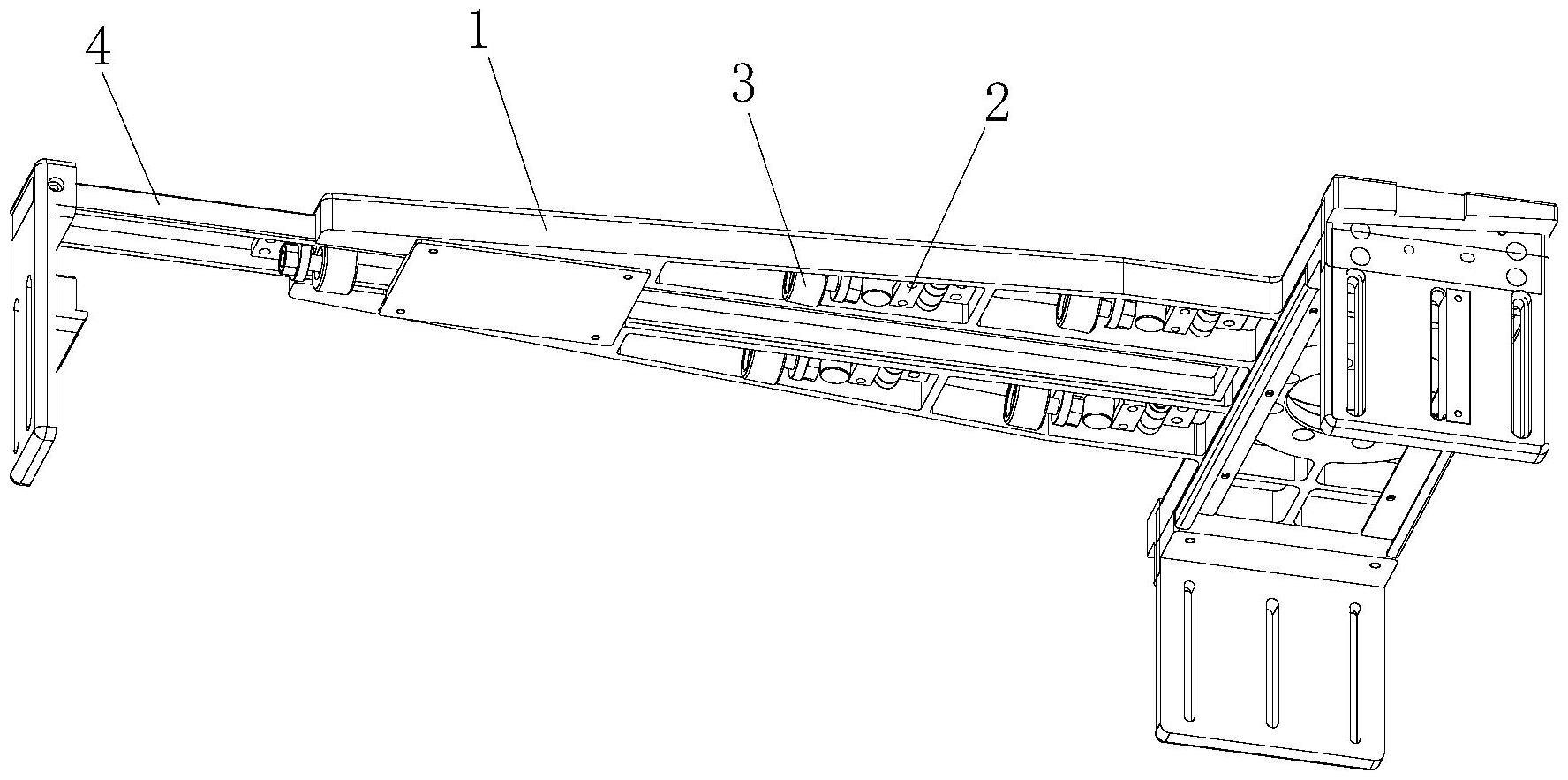
3、一种底座结构,用于安装介入机器人,并将所述介入机器人固定在手术床上,包括安装底座、角度调节组件和滑轮组件;
4、所述角度调节组件装设于所述安装底座的下表面,所述滑轮组件装设于所述角度调节组件上;
5、所述安装底座滑设于所述手术床上,通过所述滑轮组件相对所述手术床滑动;
6、所述角度调节组件用于调节所述滑轮组件的倾斜角度,以使所述滑轮组件的表面保持与所述手术床的上表面接触。
7、进一步地,所述滑轮组件包括滚轮,所述滚轮转动装设于所述角度调节组件的一端;
8、当所述底座结构安装在所述手术床上时,所述角度调节组件调节所述滚轮的倾斜角度,以使所述滚轮的表面保持与所述手术床的上表面接触。
9、进一步地,所述滑轮组件还包括调节件,所述调节件装设于所述角度调节组件上;
10、所述滚轮转动连接于所述调节件上,所述调节件用于沿所述滚轮的轴向调节滚轮的位置。
11、进一步地,所述角度调节组件包括固定件和摆动件;
12、所述固定件设置在所述安装底座的下表面;
13、所述摆动件的一端与所述固定件铰接,另一端与所述滑轮组件连接,所述摆动件相对铰接位置转动,以调节所述滑轮组件的倾斜角度,使所述滑轮组件的表面保持与所述手术床的上表面接触。
14、进一步地,所述固定件设置有固定孔,所述摆动件包括枢轴,所述枢轴安装在所述固定孔,以使所述摆动件相对所述固定件转动。
15、进一步地,所述角度调节组件还包括限位件,所述限位件装设于所述安装底座的下表面,用于限制所述摆动件绕所述枢轴旋转的最大旋转角度。
16、进一步地,所述限位件上设有限位槽,所述限位槽的槽口朝向所述安装底座;
17、所述摆动件穿设于所述限位槽内,以绕所述枢轴在所述限位槽的槽底与所述安装底座的下表面之间转动。
18、进一步地,所述角度调节组件还包括弹性件;
19、所述弹性件设置于所述摆动件与所述安装底座之间,以使所述滚轮和所述安装底座下表面之间形成间隙。
20、进一步地,所述摆动件包括容纳槽;
21、所述容纳槽的开口朝向所述安装底座,所述弹性件安装在所述容纳槽内,且保持压缩状态。
22、进一步地,所述底座结构还包括装设于所述安装底座一侧的夹紧组件,所述夹紧组件位于所述安装底座的下表面,通过所述安装底座与所述夹紧组件配合,以使所述底座结构固定在所述手术床上;
23、当所述夹紧组件夹紧所述手术床时,所述安装底座向所述夹紧组件一侧倾斜,所述摆动件绕铰接位置转动,调整所述滑轮组件的倾斜角度,且使所述弹性件产生形变,所述弹性件向所述安装底座提供一个向上的弹性力。
24、与现有技术相比,本申请实施例主要有以下有益效果:
25、本申请提供一种底座结构,通过在安装底座的底面设置滑轮组件,使底座结构安装在手术床上以后,可以沿手术床进行位置调节,以便于底座结构在安装后可以进行二次调整,直至目标位置,以便于医生手术的进行;通过角度调节组件的设置,可以使滑轮组件的表面始终保持与所述手术床的上表面接触,从而提高底座结构的安装稳定性。
技术特征:
1.一种底座结构,用于安装介入机器人,并将所述介入机器人固定在手术床上,其特征在于,包括安装底座、角度调节组件和滑轮组件;
2.根据权利要求1所述的底座结构,其特征在于,所述滑轮组件包括滚轮,所述滚轮转动装设于所述角度调节组件的一端;
3.根据权利要求2所述的底座结构,其特征在于,所述滑轮组件还包括调节件,所述调节件装设于所述角度调节组件上;
4.根据权利要求2或3所述的底座结构,其特征在于,所述角度调节组件包括固定件和摆动件;
5.根据权利要求4所述的底座结构,其特征在于,所述固定件设置有固定孔,所述摆动件包括枢轴,所述枢轴安装在所述固定孔,以使所述摆动件相对所述固定件转动。
6.根据权利要求5所述的底座结构,其特征在于,所述角度调节组件还包括限位件,所述限位件装设于所述安装底座的下表面,用于限制所述摆动件绕所述枢轴旋转的最大旋转角度。
7.根据权利要求6所述的底座结构,其特征在于,所述限位件上设有限位槽,所述限位槽的槽口朝向所述安装底座;
8.根据权利要求4所述的底座结构,其特征在于,所述角度调节组件还包括弹性件;
9.根据权利要求8所述的底座结构,其特征在于,所述摆动件包括容纳槽;
10.根据权利要求8所述的底座结构,其特征在于,所述底座结构还包括装设于所述安装底座一侧的夹紧组件,所述夹紧组件位于所述安装底座的下表面,通过所述安装底座与所述夹紧组件配合,以使所述底座结构固定在所述手术床上;
技术总结
本申请实施例属于医疗机器人技术领域,涉及一种底座结构,用于安装介入机器人,并将介入机器人固定在手术床上,包括安装底座、角度调节组件和滑轮组件;角度调节组件装设于安装底座的下表面,滑轮组件装设于角度调节组件上;安装底座滑设于手术床上,通过滑轮组件相对手术床滑动;角度调节组件用于调节滑轮组件的倾斜角度,以使滑轮组件的表面保持与手术床的上表面接触。本申请提供的底座结构能够使介入机器人根据手术需求沿手术床移动调整至目标位置,以便于医生手术的进行。
技术研发人员:张桂林
受保护的技术使用者:深圳市爱博医疗机器人有限公司
技术研发日:20230620
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!