一种康复辅助机器人的制作方法
本技术涉及康复辅助领域,具体为一种康复辅助机器人。
背景技术:
1、康复是指综合地、协调地应用医学的、教育的、社会的、职业的各种方法,使病、伤、残者已经丧失的功能尽快地、能尽最大可能地得到恢复和重建,使他们在体格上、精神上、社会上和经济上的能力得到尽可能的恢复,使他们重新走向生活,先前单单依靠医护人员进行辅助会需要大量的医护人员,在需要花费大量薪资成本的同时,会使得医护人员本身较为疲惫,无法持续辅助不同患者进行康复训练,因此通过机器人替换医护人员对患者进行康复辅助;
2、公开号为cn215021645u的中国专利公开了医疗康复腿部训练机器人,包括轮椅本体,轮椅本体右侧设有可摆动的靠背;所述轮椅本体下方设有可水平滑动的矩形块,矩形块外侧设有可摆动的腿部支撑装置,该实用新型结构新颖,构思巧妙,操作简单方便,通过对患者腿部进行摆动和按摩,从而对患者的腿部进行康复训练,加快患者的康复速度,另外,全程无需医护人员进行护理,减轻医护人员的工作强度。
3、上述专利的医疗康复腿部训练机器人在实际使用过程中,对于腿部的推动角度较为单一,对于腿部的推动水平高度较低,康复辅助训练强度较低,辅助康复的效果较低;因此,不满足现有的需求,对此本实用新型提出了一种康复辅助机器人。
技术实现思路
1、本实用新型的目的在于提供一种康复辅助机器人,由腿部包裹布通过第一魔术贴片和第二魔术贴片包裹于患者小腿,并在第一传动条纵向往返移动抬高腿部时,会通过第二传动条下端两侧的下限制块和上限制块,对腿部包裹布两侧的固定片进行包裹和限制,并由位置调整滚轮的传动可使得在腿部包裹布在抬高腿部并使得患者大腿小腿弯折过程中可以横向移动,适应腿部的弯折,解决装置在抬高腿部并使得腿部弯折的过程中装置底端需要横向位置调整的问题,提高使用过程中的稳定性,解决了上述背景技术中提出的问题。
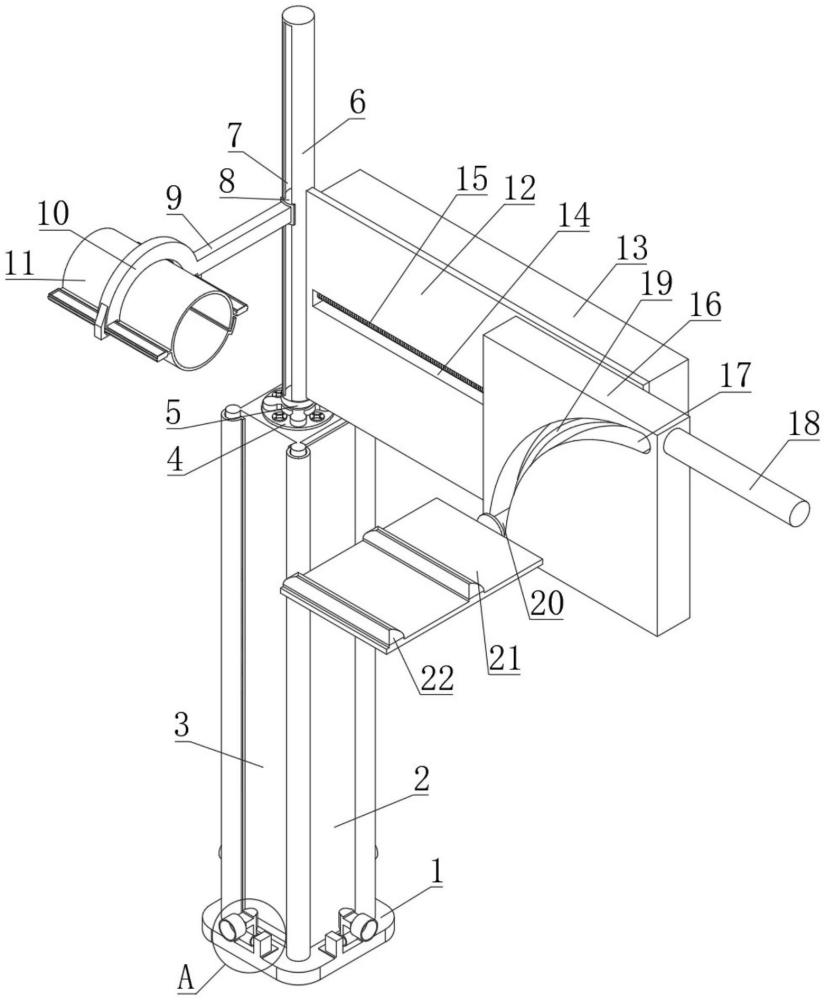
2、为实现上述目的,本实用新型提供如下技术方案:一种康复辅助机器人,包括装置底盘,所述装置底盘的上端设置有第一垂直限制框,所述第一垂直限制框的内部设置有第一滑动块,所述第一滑动块与第一垂直限制框滑动连接,所述第一滑动块的内部设置有第一纵向传动螺纹杆,所述第一纵向传动螺纹杆的外部与第一滑动块的内部螺纹配合,所述第一纵向传动螺纹杆的一端与装置底盘的上端转动连接;
3、还包括腿部包裹布,其设置于第一滑动块上端的一侧,所述腿部包裹布的前后两端均设置有固定片,所述固定片与腿部包裹布焊接固定,所述腿部包裹布的上端设置有第二传动条,所述第二传动条下端的两侧均设置有上限制块,所述上限制块与第二传动条为一体结构,两个所述上限制块的下端均设置有下限制块,所述下限制块与上限制块焊接固定,所述上限制块内部的下端和下限制块内部的上端均设置有位置调整滚轮,所述位置调整滚轮的两侧分别与上限制块和下限制块内部的两侧转动连接,所述固定片内部的上下两端均设置有第二横向滑动轨,所述第二横向滑动轨嵌入固定片的内部,所述第二横向滑动轨与位置调整滚轮的外部卡槽连接,所述第二横向滑动轨的外部设置有凸出环,所述腿部包裹布的一端设置有第二魔术贴片,所述腿部包裹布的另一端设置有第一魔术贴片,所述第一魔术贴片与第二魔术贴片粘连固定。
4、优选的,所述第一滑动块的上端设置有第二垂直限制框,所述第二垂直限制框与第一滑动块之间设置有连接片,所述连接片与第一滑动块之间通过螺栓固定连接,所述连接片与第二垂直限制框之间通过第一转动连接轴转动连接。
5、优选的,所述第二垂直限制框的内部设置有第二纵向传动螺纹杆,所述第二纵向传动螺纹杆的上下两端均与第二垂直限制框的内部转动连接,所述第二纵向传动螺纹杆外部的一侧设置有第二滑动块,所述第二滑动块的外部与纵向滑动轨的内部滑动连接,所述第二滑动块的内部与第二纵向传动螺纹杆的外部螺纹配合,所述第二滑动块的一端设置有第一传动条,所述第一传动条的两端分别与第二传动条和第二滑动块的一侧焊接固定。
6、优选的,所述第二垂直限制框的一侧设置有连接固定板,所述连接固定板的后端设置有第一收容框,所述第一收容框的内部设置有第一横向滑动轨,所述第一横向滑动轨延伸至连接固定板的一侧,所述第一横向滑动轨的内部设置有横向传动螺纹杆,所述横向传动螺纹杆的两端均与第一收容框的内部转动连接,所述横向传动螺纹杆外部的一侧设置有第二收容框,所述第二收容框外部的一侧与横向传动螺纹杆的外部螺纹配合。
7、优选的,所述第二收容框内部的一侧设置有环状滑动轨,所述环状滑动轨外部前端的一侧设置有第三滑动块,所述第三滑动块与环状滑动轨滑动连接,所述第三滑动块的一端设置有大腿托动板,所述大腿托动板与第三滑动块焊接固定,所述大腿托动板上端一侧的两端均设置有防偏移条,所述防偏移条与大腿托动板焊接固定。
8、优选的,所述第二收容框的一侧设置有伸缩装置,所述伸缩装置与第三滑动块之间通过拉动绳固定连接。
9、优选的,所述装置底盘的上端环状设置有四对支撑架,四对所述支撑架外部的上端均设置有传动折叠架,所述传动折叠架与支撑架之间通过第二转动连接轴转动连接。
10、优选的,所述传动折叠架的一端设置有吸附贴合橡胶垫,所述传动折叠架的另一端设置有抽气固定泵,所述抽气固定泵与吸附贴合橡胶垫之间密封连接。
11、与现有技术相比,本实用新型的有益效果如下:
12、1、本实用新型通过在第二垂直限制框的内部设置有纵向滑动轨,纵向滑动轨的前端设置有第二传动条,第二传动条的下端设置有腿部包裹布,腿部包裹布的前后两端均设置有上限制块,上限制块的下端设置有位置调整滚轮,在实际对患者的腿部进行康复的过程中,由腿部包裹布通过第一魔术贴片和第二魔术贴片包裹于患者小腿,并在第一传动条纵向往返移动抬高腿部时,会通过第二传动条下端两侧的下限制块和上限制块,对腿部包裹布两侧的固定片进行包裹和限制,并由位置调整滚轮的传动可使得在腿部包裹布在抬高腿部并使得患者大腿小腿弯折过程中可以横向移动,适应腿部的弯折,解决装置在抬高腿部并使得腿部弯折的过程中装置底端需要横向位置调整的问题,提高使用过程中的稳定性。
13、2、本实用新型通过在第二垂直限制框的一侧设置有连接固定板,连接固定板的前端设置有第二收容框,第二收容框的内部设置有环状滑动轨,环状滑动轨外部的前端设置有大腿托动板,在实际使用并佩戴的过程中,在安装并使用装置时,将装置放置于患者病床靠近康复腿部的一侧,由腿部包裹布通过第一魔术贴片和第二魔术贴片的粘连包裹于患者的小腿部,而通过大腿托动板直接伸入大腿下端,通过顺延环状滑动轨移动即可拖动大腿部,大腿小腿部分同时拖动并辅助产生弯曲,通过弯曲进行辅助康复,使用者躺在本身的病床上即可完成康复辅助,减少医护人员的疲劳度。
技术特征:
1.一种康复辅助机器人,包括装置底盘(1),所述装置底盘(1)的上端设置有第一垂直限制框(2),所述第一垂直限制框(2)的内部设置有第一滑动块(3),所述第一滑动块(3)与第一垂直限制框(2)滑动连接,所述第一滑动块(3)的内部设置有第一纵向传动螺纹杆(28),所述第一纵向传动螺纹杆(28)的外部与第一滑动块(3)的内部螺纹配合,所述第一纵向传动螺纹杆(28)的一端与装置底盘(1)的上端转动连接,其特征在于:
2.根据权利要求1所述的一种康复辅助机器人,其特征在于:所述第一滑动块(3)的上端设置有第二垂直限制框(6),所述第二垂直限制框(6)与第一滑动块(3)之间设置有连接片(4),所述连接片(4)与第一滑动块(3)之间通过螺栓固定连接,所述连接片(4)与第二垂直限制框(6)之间通过第一转动连接轴(5)转动连接。
3.根据权利要求2所述的一种康复辅助机器人,其特征在于:所述第二垂直限制框(6)的内部设置有第二纵向传动螺纹杆(29),所述第二纵向传动螺纹杆(29)的上下两端均与第二垂直限制框(6)的内部转动连接,所述第二纵向传动螺纹杆(29)外部的一侧设置有第二滑动块(8),所述第二滑动块(8)的外部与纵向滑动轨(7)的内部滑动连接,所述第二滑动块(8)的内部与第二纵向传动螺纹杆(29)的外部螺纹配合,所述第二滑动块(8)的一端设置有第一传动条(9),所述第一传动条(9)的两端分别与第二传动条(10)和第二滑动块(8)的一侧焊接固定。
4.根据权利要求2所述的一种康复辅助机器人,其特征在于:所述第二垂直限制框(6)的一侧设置有连接固定板(12),所述连接固定板(12)的后端设置有第一收容框(13),所述第一收容框(13)的内部设置有第一横向滑动轨(14),所述第一横向滑动轨(14)延伸至连接固定板(12)的一侧,所述第一横向滑动轨(14)的内部设置有横向传动螺纹杆(15),所述横向传动螺纹杆(15)的两端均与第一收容框(13)的内部转动连接,所述横向传动螺纹杆(15)外部的一侧设置有第二收容框(16),所述第二收容框(16)外部的一侧与横向传动螺纹杆(15)的外部螺纹配合。
5.根据权利要求4所述的一种康复辅助机器人,其特征在于:所述第二收容框(16)内部的一侧设置有环状滑动轨(17),所述环状滑动轨(17)外部前端的一侧设置有第三滑动块(20),所述第三滑动块(20)与环状滑动轨(17)滑动连接,所述第三滑动块(20)的一端设置有大腿托动板(21),所述大腿托动板(21)与第三滑动块(20)焊接固定,所述大腿托动板(21)上端一侧的两端均设置有防偏移条(22),所述防偏移条(22)与大腿托动板(21)焊接固定。
6.根据权利要求4所述的一种康复辅助机器人,其特征在于:所述第二收容框(16)的一侧设置有伸缩装置(18),所述伸缩装置(18)与第三滑动块(20)之间通过拉动绳(19)固定连接。
7.根据权利要求1所述的一种康复辅助机器人,其特征在于:所述装置底盘(1)的上端环状设置有四对支撑架(23),四对所述支撑架(23)外部的上端均设置有传动折叠架(25),所述传动折叠架(25)与支撑架(23)之间通过第二转动连接轴(24)转动连接。
8.根据权利要求7所述的一种康复辅助机器人,其特征在于:所述传动折叠架(25)的一端设置有吸附贴合橡胶垫(27),所述传动折叠架(25)的另一端设置有抽气固定泵(26),所述抽气固定泵(26)与吸附贴合橡胶垫(27)之间密封连接。
技术总结
本技术提供了一种康复辅助机器人,属于康复辅助领域。本技术的一种康复辅助机器人,包括装置底盘,所述装置底盘的上端设置有第一垂直限制框;所述腿部包裹布的前后两端均设置有固定片,所述腿部包裹布的上端设置有第二传动条,所述第二传动条下端的两侧均设置有上限制块,两个所述上限制块的下端均设置有下限制块。本技术解决了现有医疗康复腿部训练机器人对于腿部的推动角度较为单一的问题,本技术由腿部包裹布通过第一魔术贴片和第二魔术贴片包裹于患者小腿,对腿部包裹布两侧的固定片进行包裹和限制,并由位置调整滚轮的传动可使得在腿部包裹布在抬高腿部并使得患者大腿小腿弯折过程中可以横向移动。
技术研发人员:张余,王少白,吴粤,黄文汉,钟国庆,皇甫良,兰天,林金鹏
受保护的技术使用者:广东省人民医院
技术研发日:20230704
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!