用于测量手术机器人主从控制延迟时间的装置的制作方法
本技术涉及一种医疗器械技术,特别涉及一种用于测量手术机器人主从控制延迟时间的装置。
背景技术:
1、手术机器人的使用可提高医生操作精度、扩大医生可操作空间、降低手术对医生经验的依赖性,目前手术机器人辅助系统已经大量临床应用。手术机器人大量采用主从控制模式,主从控制延迟时间是判断手术机器人在电磁兼容、环境与安全可靠性检测之后,功能是否保持正常的重要判据。
2、主从控制延迟时间影响手术机器人响应速度和医生使用舒适性,目前已有的测量手术机器人主从控制延迟时间的装置,设计复杂、测量精度低、操作过程繁琐。
3、微创手术机器人主从跟踪延时测试方法中利用外部相机拍摄主手输入矩形条和从手输出矩形条的转动方位,通过计算两个矩形条之间的角度差转换为系统延时。首先相机拍照速度有限,数据采样率低;该测试方法通过图像处理技术边缘检测算法检测矩形条边缘,再计算两个矩形条之间的角度差,转换为系统延时,这种间接测量方法将增加测量误差;使用模型等效替代手术机器人的运动过程,无法得到真实的手术机器人运动数据。
技术实现思路
1、针对检测人员需要测量手术机器人主从控制延迟时间值问题,提出了一种用于测量手术机器人主从控制延迟时间的装置。
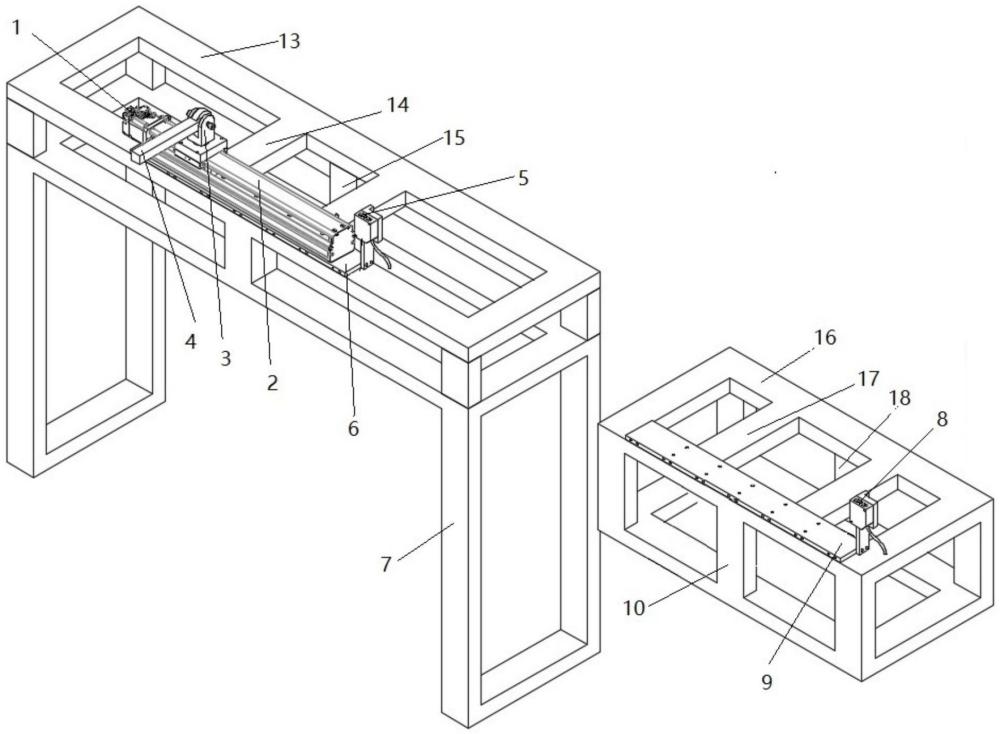
2、本实用新型的技术方案为:一种用于测量手术机器人主从控制延迟时间的装置,包括伺服电机、直线模组、夹具、第一位移传感器、第一支架、第一型材支撑架、第二位移传感器、第二支架、第二型材支撑架、电脑、伺服驱动器、plc控制器;
3、作为直线模组驱动单元的伺服电机与直线模组驱动装配,装配后的伺服电机与直线模组固定在第一支架上,第一支架固定在第一型材支撑架边框上;
4、所述固定手术机器人主端设备末端操作手柄的夹具通过螺钉固定在直线模组上;
5、所述检测手术机器人主端设备位移的第一位移传感器固定在第一支架右侧末端位置;
6、所述第二支架固定在第二型材支撑架的边框上;
7、所述检测手术机器人从端设备位移的第二位移传感器固定在第二支架右侧末端位置;
8、所述第一位移传感器和第二位移传感器检测数据送至plc控制器;
9、所述plc控制器输出控制信号至伺服电机的伺服驱动器。
10、优选的,所述第一型材支撑架包括x轴向边框、y轴向边框和z轴向边框,边框上有螺纹孔,通过螺钉将第一支架固定在第一型材支撑架的x、y或z轴向边框上。
11、优选的,所述直线模组通过夹具与手术机器人主端设备末端的操作手柄刚性连接。
12、优选的,所述第二型材支撑架包括x轴向边框、y轴向边框和z轴向边框,边框上有螺纹孔,通过螺钉将第二支架固定在第二型材支撑架的x、y或z轴向边框上。
13、优选的,所述手术机器人从端设备与手术机器人主端设备同轴方向,搁置在第二支架上,手术机器人从端设备跟随手术机器人主端设备直线移动。
14、优选的,所述用于测量手术机器人主从控制延迟时间的装置,还包括电脑,电脑中设置伺服电机运动参数送plc控制器,运动参数包括运动时间、速度。
15、优选的,所述plc控制器同时接收第一位移传感器和第二位移传感器检测的手术机器人主端设备和从端设备位移-时间数据。
16、优选的,所述伺服电机型号为msmf042l1v2m,额定扭矩:1.27nm;所述直线模组型号为fsks75-350-l10-rf-p400w-s3,额定扭矩:1.3nm;额定推力:680n;最高运转速度:500mm/s;最高负载质量:水平20kg,垂直8kg;重复定位精度:±0.01mm,最长行程:350mm;所述第一位移传感器、第二位移传感器型号均为blg-250n(p)m,检测距离:250mm;检测范围:±150mm;线性精度:±0.1%f.s,f.s.=300mm;分辨率:75μm。
17、本实用新型的有益效果在于:本实用新型用于测量手术机器人主从控制延迟时间的装置,当手术机器人主端操作手柄有变化时,只需更换装置的夹具,因此该装置适合各种类型的手术机器人延迟时间测试;该装置结构简单、操作方便,只需要夹具夹紧主端设备操作手柄,并调节从端设备末端位于合适的空间位置,工程师即可快速、方便的测量位移-时间数据,经过简单线性计算,得到系统延迟时间,数据可靠、精度更高,据此判断手术机器人在环境与可靠性、安全性和电磁兼容测试前后,其功能是否降低/丧失。
技术特征:
1.一种用于测量手术机器人主从控制延迟时间的装置,其特征在于,包括伺服电机、直线模组、夹具、第一位移传感器、第一支架、第一型材支撑架、第二位移传感器、第二支架、第二型材支撑架、电脑、伺服驱动器、plc控制器;作为直线模组驱动单元的伺服电机与直线模组驱动装配,装配后的伺服电机与直线模组固定在第一支架上,第一支架固定在第一型材支撑架边框上;
2.根据权利要求1所述用于测量手术机器人主从控制延迟时间的装置,其特征在于,所述第一型材支撑架包括x轴向边框、y轴向边框和z轴向边框,边框上有螺纹孔,通过螺钉将第一支架固定在第一型材支撑架的x、y或z轴向边框上。
3.根据权利要求2所述用于测量手术机器人主从控制延迟时间的装置,其特征在于,所述直线模组通过夹具与手术机器人主端设备末端的操作手柄刚性连接。
4.根据权利要求2或3所述用于测量手术机器人主从控制延迟时间的装置,其特征在于,所述第二型材支撑架包括x轴向边框、y轴向边框和z轴向边框,边框上有螺纹孔,通过螺钉将第二支架固定在第二型材支撑架的x、y或z轴向边框上。
5.根据权利要求4所述用于测量手术机器人主从控制延迟时间的装置,其特征在于,所述手术机器人从端设备与手术机器人主端设备同轴方向,搁置在第二支架上,手术机器人从端设备跟随手术机器人主端设备直线移动。
6.根据权利要求5所述用于测量手术机器人主从控制延迟时间的装置,其特征在于,还包括电脑,电脑中设置伺服电机运动参数送plc控制器,运动参数包括运动时间、速度。
7.根据权利要求6所述用于测量手术机器人主从控制延迟时间的装置,其特征在于,所述plc控制器同时接收第一位移传感器和第二位移传感器检测的手术机器人主端设备和从端设备位移-时间数据。
8.根据权利要求1、2、3、5、6或7中任意一项所述用于测量手术机器人主从控制延迟时间的装置,其特征在于,所述伺服电机型号为msmf042l1v2m,额定扭矩:1.27nm;所述直线模组型号为fsks75-350-l10-rf-p400w-s3,额定扭矩:1.3nm;额定推力:680n;最高运转速度:500mm/s;最高负载质量:水平20kg,垂直8kg;重复定位精度:±0.01mm,最长行程:350mm;所述第一位移传感器、第二位移传感器型号均为blg-250n(p)m,检测距离:250mm;检测范围:±150mm;线性精度:±0.1%f.s,f.s.=300mm;分辨率:75μm。
技术总结
本技术涉及一种用于测量手术机器人主从控制延迟时间的装置,手术机器人主端设备末端操作手柄通过固定单元结构固定在具有X、Y或Z轴向边框的第一型材支撑架上,手术机器人从端设备与手术机器人主端设备同轴方向,搁置在第二型材支撑架上,手术机器人主端设备在伺服电机带动下直线运动,手术机器人从端设备跟随直线移动,通过处理两台位移传感器测量的位移‑时间数据,即可得到手术机器人主从控制延迟时间。结构简单、易于操作,通过测量手术机器人主从端参考点位移‑时间数据,经过简单线性计算即可得到延迟时间,测量精度更高,该设备能够协助检测人员快速判断手术机器人在环境与可靠性、安全性和电磁兼容检测前后,其性能是否下降/丧失。
技术研发人员:孙丽杰,陈婉如,黄薛青,熊信文
受保护的技术使用者:上海市计量测试技术研究院(中国上海测试中心、华东国家计量测试中心、上海市计量器具强制检定中心)
技术研发日:20230731
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!