一种基于VR技术的医疗机器人
本技术涉及医疗设备,尤其涉及一种基于vr技术的医疗机器人。
背景技术:
1、随着现代科技的发展,医疗机器人已在各类医疗场所被广泛应用,如手术室、康复治疗中心等。这种医疗机器人可以执行精确的手术操作,减少医生的疲劳,提高医疗质量和疗效。同时,虚拟现实(virtual reality,vr)技术以其提供的身临其境的虚拟环境,使得医疗学习和培训过程变得更为直观和经验化。如今,通过将vr技术与医疗机器人技术结合,可以使医生在无需接触患者的情况下,通过操控机器人进行手术,不仅降低了医生的风险,同时也提高了患者的舒适度。迄今为止,基于vr技术的医疗机器人已在一些领域展示了其强大的潜力,包括远程手术、手术模拟、手术训练等。但是,尽管vr技术在医疗中的应用有诸多优点,仍面临一些重大挑战,比如机器人结构复杂,造价成本高,目前无法在医院得到普及;并且机器人操作不够灵活、安全性有待提升。
技术实现思路
1、本实用新型克服了现有技术的不足,提供了一种基于vr技术的医疗机器人。
2、为达到上述目的,本实用新型采用的技术方案为:
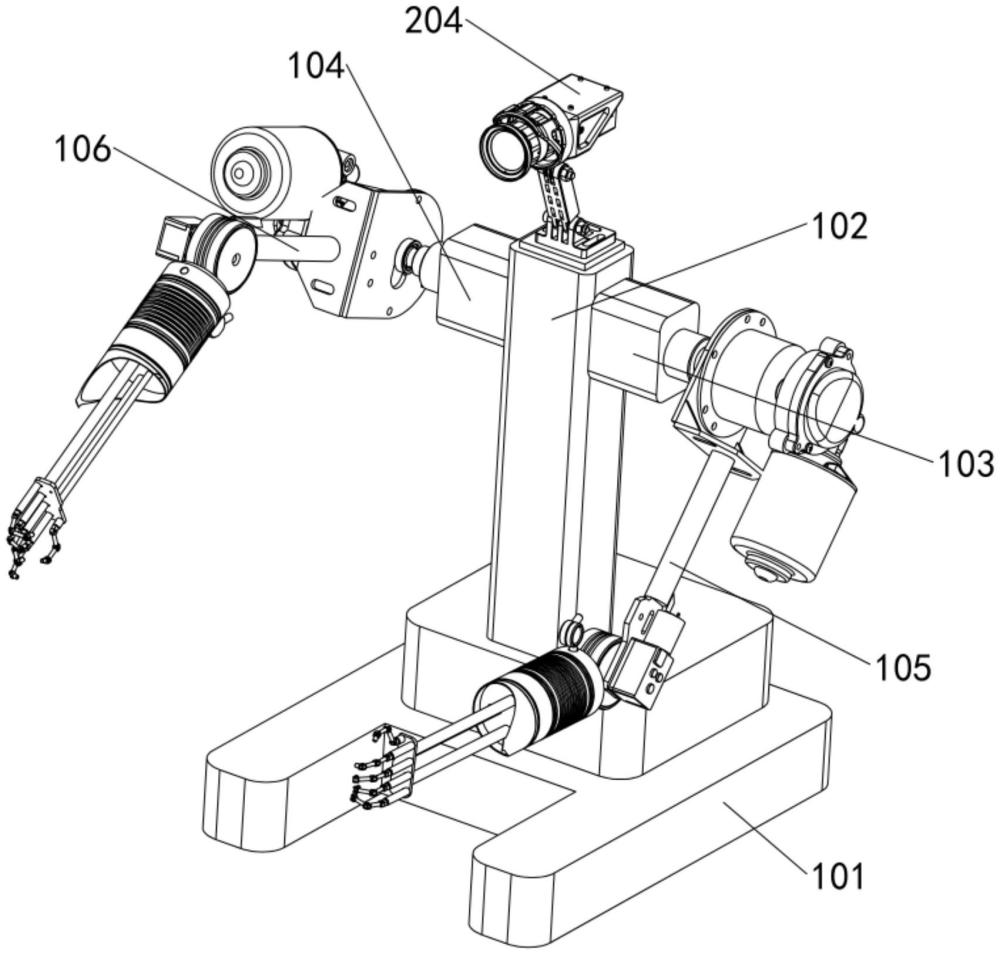
3、本实用新型公开了一种基于vr技术的医疗机器人,包括底座,所述底座上设置有支柱,所述支柱的左侧设置有第一连接件,所述支柱的右侧设置有第二连接件,所述第一连接件配合连接有第一操作臂,所述第二连接件配合连接有第二操作臂;
4、所述第一操作臂包括第一关节,所述第一关节的一端转动连接在所述第一连接件上,所述第一关节的另一端与第二关节的一端相转动连接,所述第二关节的另一端配合连接有第一仿生机械手;所述第二操作臂包括第三关节,所述第三关节的一端转动连接在所述第二连接件上,所述第三关节的另一端与第四关节的一端相转动连接,所述第四关节的另一端配合连接有第二仿生机械手;
5、所述支柱的顶部固定连接有摄像机;
6、所述医疗机器人还包括ar头盔。
7、进一步地,本实用新型的一个较佳实施例中,所述第一关节与第一连接件之间通过第一传动轴相连接,所述第一关节上设置有第一电机,所述第一电机的输出端与所述第一传动轴的端部相连接。
8、进一步地,本实用新型的一个较佳实施例中,所述第一关节与第二关节之间通过第二传动轴相连接,所述第一关节上设置有第二电机,所述第二电机的输出端与所述第二传动轴的端部相连接。
9、进一步地,本实用新型的一个较佳实施例中,所述第三关节与第二连接件之间通过第三传动轴相连接,所述第三关节上设置有第三电机,所述第三电机的输出端与所述第三传动轴的端部相连接。
10、进一步地,本实用新型的一个较佳实施例中,所述第三关节与第四关节之间通过第四传动轴相连接,所述第三关节上设置有第四电机,所述第四电机的输出端与所述第四传动轴的端部相连接。
11、进一步地,本实用新型的一个较佳实施例中,所述第二关节包括第一伸缩气缸,所述第一伸缩气缸的伸缩端与第一伸缩杆的一端配合连接,所述第一伸缩杆的另一端与所述第一仿生机械手配合连接。
12、进一步地,本实用新型的一个较佳实施例中,所述第四关节包括第二伸缩气缸,所述第二伸缩气缸的伸缩端与第二伸缩杆的一端配合连接,所述第二伸缩杆的另一端与所述第二仿生机械手配合连接。
13、进一步地,本实用新型的一个较佳实施例中,所述第一电机与第二电机均为伺服电机。
14、进一步地,本实用新型的一个较佳实施例中,所述第三电机与第四电机均为伺服电机。
15、本实用新型解决了背景技术中存在的缺陷,本实用新型具备以下有益效果:通过人机交互的方式,将虚拟模型实时叠加到真实的手术场景中,医生如同带了一副“透视”眼镜,极大地降低了手术风险,并且机器人结构简单,造价成本低,机器人操作灵活、精度高、安全性能好。
技术特征:
1.一种基于vr技术的医疗机器人,包括底座,其特征在于,所述底座上设置有支柱,所述支柱的左侧设置有第一连接件,所述支柱的右侧设置有第二连接件,所述第一连接件配合连接有第一操作臂,所述第二连接件配合连接有第二操作臂;
2.根据权利要求1所述的一种基于vr技术的医疗机器人,其特征在于,所述第一关节与第一连接件之间通过第一传动轴相连接,所述第一关节上设置有第一电机,所述第一电机的输出端与所述第一传动轴的端部相连接。
3.根据权利要求2所述的一种基于vr技术的医疗机器人,其特征在于,所述第一关节与第二关节之间通过第二传动轴相连接,所述第一关节上设置有第二电机,所述第二电机的输出端与所述第二传动轴的端部相连接。
4.根据权利要求1所述的一种基于vr技术的医疗机器人,其特征在于,所述第三关节与第二连接件之间通过第三传动轴相连接,所述第三关节上设置有第三电机,所述第三电机的输出端与所述第三传动轴的端部相连接。
5.根据权利要求4所述的一种基于vr技术的医疗机器人,其特征在于,所述第三关节与第四关节之间通过第四传动轴相连接,所述第三关节上设置有第四电机,所述第四电机的输出端与所述第四传动轴的端部相连接。
6.根据权利要求1所述的一种基于vr技术的医疗机器人,其特征在于,所述第二关节包括第一伸缩气缸,所述第一伸缩气缸的伸缩端与第一伸缩杆的一端配合连接,所述第一伸缩杆的另一端与所述第一仿生机械手配合连接。
7.根据权利要求1所述的一种基于vr技术的医疗机器人,其特征在于,所述第四关节包括第二伸缩气缸,所述第二伸缩气缸的伸缩端与第二伸缩杆的一端配合连接,所述第二伸缩杆的另一端与所述第二仿生机械手配合连接。
8.根据权利要求3所述的一种基于vr技术的医疗机器人,其特征在于,所述第一电机与第二电机均为伺服电机。
9.根据权利要求5所述的一种基于vr技术的医疗机器人,其特征在于,所述第三电机与第四电机均为伺服电机。
技术总结
本技术涉及医疗设备技术领域,尤其涉及一种基于VR技术的医疗机器人,一种基于VR技术的医疗机器人,包括底座,所述底座上设置有支柱,所述支柱的左侧设置有第一连接件,所述支柱的右侧设置有第二连接件,所述第一连接件配合连接有第一操作臂,所述第二连接件配合连接有第二操作臂;所述第一操作臂包括第一关节,所述第一关节的一端转动连接在所述第一连接件上,所述第一关节的另一端与第二关节的一端相转动连接,所述第二关节的另一端配合连接有第一仿生机械手,机器人结构简单,造价成本低,机器人操作灵活、精度高、安全性能好。
技术研发人员:周敏
受保护的技术使用者:南华大学附属第二医院
技术研发日:20230801
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!