一种可自由转动的眼科手术机器人
本技术涉及医用设备,具体为一种可自由转动的眼科手术机器人。
背景技术:
1、在眼科手术中,眼内手术的手术目标组织位于眼球内部,其以晶状体后膜为界,又分为眼前节手术(例如白内障超声乳化切除术和小梁切除术等)和眼后节手术(例如玻璃体切除术、视网膜静脉血管插管术和视网膜静脉血管搭桥术等)。尤其眼后节手术,目标组织最为精密、操作精度要求最高。比如在视网膜静脉插管术中,医生要在显微镜视野下操作,将显微注射针穿过巩膜切口并刺入25um、平均直径在80-120um的堵塞血管中,并需要保持2mins注册溶解剂,而医生手部颤抖平均幅度达到156um,因此该类手术已经超过了人类手术操作的精细度极限于是,运动精度高、稳定性好的手术机器人辅助或者代替医生进行手术,成了科学界解决以上痛点的研究方向。
2、现有的眼科手术机器人普遍不方便将机械臂拆卸下来进行维修,当机械臂出现问题时,不能更快的更换其他机械臂,从而增加了停机时间,降低了工作效率,且市面上的眼科手术机器人虽然转动自由度高,但是体型偏大,容易遮挡医生视野,从而带来不便,降低了实用性。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种可自由转动的眼科手术机器人,以解决上述背景技术中提出的眼科手术机器人普遍不方便将机械臂拆卸下来进行维修,当机械臂出现问题时,不能更快的更换其他机械臂,从而增加了停机时间,降低了工作效率,且市面上的眼科手术机器人虽然转动自由度高,但是体型偏大,容易遮挡医生视野,从而带来不便,降低了实用性的问题。
3、(二)技术方案
4、为实现上述目的,本实用新型提供如下技术方案:一种可自由转动的眼科手术机器人,包括底座,所述底座的外端固定连接有安装头,所述安装头上开设有螺纹孔,所述底座的内部设置有磁吸机构,所述底座的上端设置有转动机构,所述底座的上端设置有快拆机构;
5、所述磁吸机构包括磁吸接口、放置槽、限位槽、限位块、固定块、安装块、供电接口、磁吸插头、蓄电池、wifi模块、控制模块、控制线接口、连接线,所述底座的上端固定连接有固定块,所述固定块上开设有放置槽,所述放置槽的左右两端开设有限位槽,所述限位槽开设有两个,所述放置槽的内部设置有磁吸接口,所述磁吸接口的上端活动连接有磁吸插头。
6、优选的,所述底座的内部设置有蓄电池,所述底座的内部设置有wifi模块,所述底座的内部设置有控制模块,所述底座的后端开设有控制线接口,所述控制线接口的后端设置有连接线,所述连接线与外部控制设备连接,所述磁吸接口的上端固定连接有安装块,所述安装块的左右两端固定连接有限位块,所述限位块设置有两个,两个所述限位块与限位槽活动连接。
7、优选的,所述底座的右端设置有供电接口,所述供电接口与磁吸接口电性连接,所述供电接口与外部供电线活动连接。
8、优选的,所述转动机构包括电动转轴一、转动柱、连接臂、电动转轴二、辅助臂、加固柱、加固板、定位块,所述安装块的上端转动连接有电动转轴一,所述电动转轴一的上端转动连接有转动柱,所述转动柱上设置有连接臂,所述连接臂呈圆弧状,所述连接臂的前后两端设置有定位块,所述定位块设置有多个,所述辅助臂的左右两端固定连接有加固板。
9、优选的,所述加固板设置有两个,所述连接臂的上端设置有电动转轴二,所述电动转轴二的左右两端转动连接有辅助臂,所述辅助臂之间固定连接有加固柱,所述加固柱设置有多个。
10、优选的,所述快拆机构包括磁吸头、刀头接头、电动夹爪、转动块,两个所述辅助臂之间转动连接有刀头接头,所述刀头接头的前端活动连接有磁吸头。
11、优选的,所述磁吸头的前端设置有转动块,所述转动块的前端设置有电动夹爪,所述转动块与刀头接头活动连接。
12、与现有技术相比,本实用新型提供了一种可自由转动的眼科手术机器人,具备以下有益效果:
13、该装置体积较小,通过定位块和加固板用来支撑连接臂的部分,从而实现较小的零件高强度支撑,使医生在使用时不会起到大面积遮挡,通过磁吸接口和磁吸插头进行磁吸,配合限位块和限位槽匹配,从而使机械臂快速与底座进行组装,在工作时发生意外时也可以第一时间断电进行更换机械臂,提高了工作效率,减少了停机时间。
技术特征:
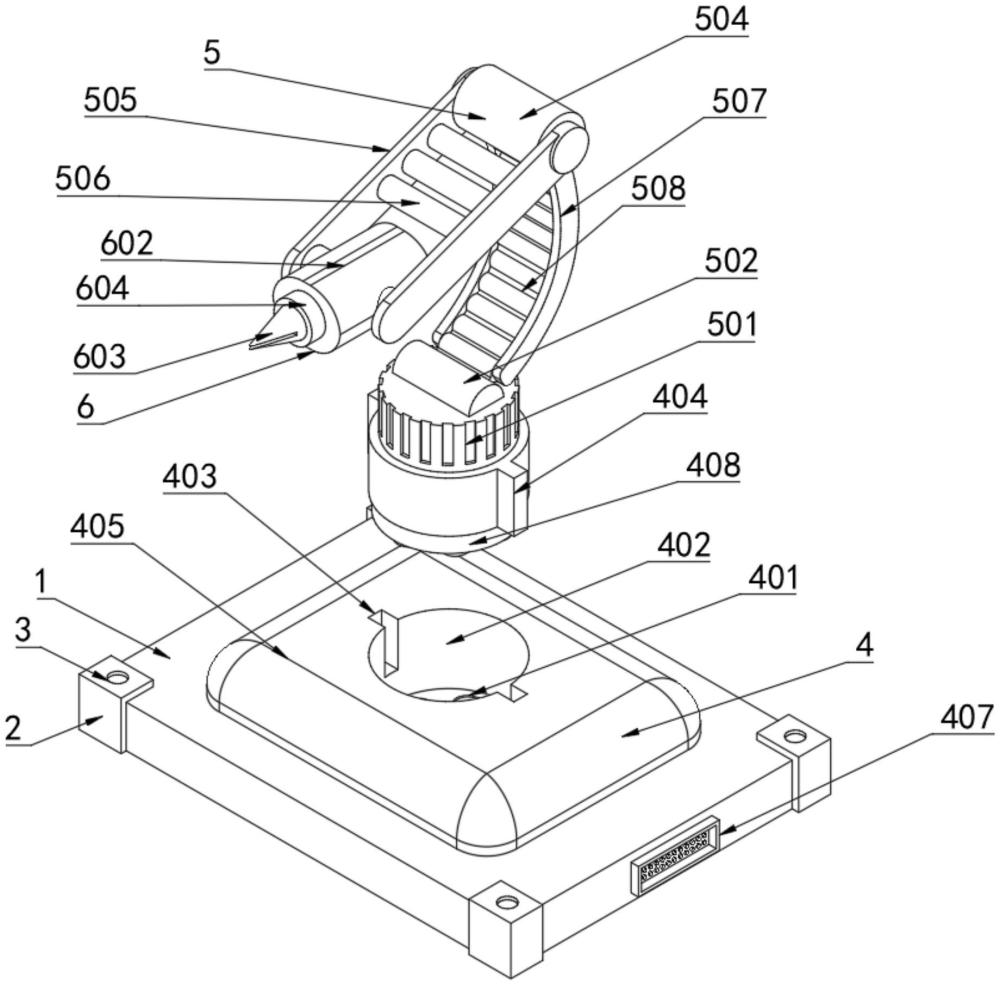
1.一种可自由转动的眼科手术机器人,包括底座(1),其特征在于:所述底座(1)的外端固定连接有安装头(2),所述安装头(2)上开设有螺纹孔(3),所述底座(1)的内部设置有磁吸机构(4),所述底座(1)的上端设置有转动机构(5),所述底座(1)的上端设置有快拆机构(6);
2.根据权利要求1所述的一种可自由转动的眼科手术机器人,其特征在于:所述底座(1)的内部设置有蓄电池(409),所述底座(1)的内部设置有wifi模块(410),所述底座(1)的内部设置有控制模块(411),所述底座(1)的后端开设有控制线接口(412),所述控制线接口(412)的后端设置有连接线(413),所述连接线(413)与外部控制设备连接,所述磁吸接口(401)的上端固定连接有安装块(406),所述安装块(406)的左右两端固定连接有限位块(404),所述限位块(404)设置有两个,两个所述限位块(404)与限位槽(403)活动连接。
3.根据权利要求2所述的一种可自由转动的眼科手术机器人,其特征在于:所述底座(1)的右端设置有供电接口(407),所述供电接口(407)与磁吸接口(401)电性连接,所述供电接口(407)与外部供电线活动连接。
4.根据权利要求3所述的一种可自由转动的眼科手术机器人,其特征在于:所述转动机构(5)包括电动转轴一(501)、转动柱(502)、连接臂(503)、电动转轴二(504)、辅助臂(505)、加固柱(506)、加固板(507)、定位块(508),所述安装块(406)的上端转动连接有电动转轴一(501),所述电动转轴一(501)的上端转动连接有转动柱(502),所述转动柱(502)上设置有连接臂(503),所述连接臂(503)呈圆弧状,所述连接臂(503)的前后两端设置有定位块(508),所述定位块(508)设置有多个,所述辅助臂(505)的左右两端固定连接有加固板(507)。
5.根据权利要求4所述的一种可自由转动的眼科手术机器人,其特征在于:所述加固板(507)设置有两个,所述连接臂(503)的上端设置有电动转轴二(504),所述电动转轴二(504)的左右两端转动连接有辅助臂(505),所述辅助臂(505)之间固定连接有加固柱(506),所述加固柱(506)设置有多个。
6.根据权利要求5所述的一种可自由转动的眼科手术机器人,其特征在于:所述快拆机构(6)包括磁吸头(601)、刀头接头(602)、电动夹爪(603)、转动块(604),两个所述辅助臂(505)之间转动连接有刀头接头(602),所述刀头接头(602)的前端活动连接有磁吸头(601)。
7.根据权利要求6所述的一种可自由转动的眼科手术机器人,其特征在于:所述磁吸头(601)的前端设置有转动块(604),所述转动块(604)的前端设置有电动夹爪(603),所述转动块(604)与刀头接头(602)活动连接。
技术总结
本技术涉及医用设备技术领域,且公开了一种可自由转动的眼科手术机器人,包括底座,所述底座的外端固定连接有安装头,所述安装头上开设有螺纹孔,所述底座的内部设置有磁吸机构,所述底座的上端设置有转动机构,所述底座的上端设置有快拆机构。该可自由转动的眼科手术机器人,该装置体积较小,通过定位块和加固板用来支撑连接臂的部分,从而实现较小的零件高强度支撑,使医生在使用时不会起到大面积遮挡,通过磁吸接口和磁吸插头进行磁吸,配合限位块和限位槽匹配,从而使机械臂快速与底座进行组装,在工作时发生意外时也可以第一时间断电进行更换机械臂,提高了工作效率,减少了停机时间,提高了实用性。
技术研发人员:徐春明,杨子卿,林佳慧,张悦
受保护的技术使用者:新疆医科大学
技术研发日:20231030
技术公布日:2024/10/10
- 还没有人留言评论。精彩留言会获得点赞!