一种动力盒、手术机器人从操纵臂及手术机器人的制作方法
本申请涉及医疗器械,尤其涉及一种动力盒、手术机器人从操纵臂及手术机器人。
背景技术:
1、微创手术是一种利用腹腔镜、胸腔镜等医疗器械及相关设备进行的手术,具有创伤小、疼痛轻、恢复快的优点。医生可以通过手术机器人执行微创手术操作,手术机器人包括主控制臂和从操纵臂,主控制臂采集到医生的操作信号经控制系统处理后生成从操纵臂的控制信号,由从操纵臂执行手术操作。
2、从操纵臂上设置有可移动的动力盒,搭载多种手术器械的器械盒通过无菌隔离板卡接在动力盒上,以使器械盒和动力盒中的动力设备形成传动连接,并在动力设备的驱动下,进行各类的手术工作。
3、为了确保从操纵臂手术过程的安全性,在术前需要对动力盒、无菌隔离板和器械盒的卡接牢固程度进行校验。为此,通常会在动力盒中设置检测组件,例如中国实用新型专利cn218960929u中的方案包括对射装置和遮挡柱。无菌隔离板和器械盒在卡接到动力盒上时,会依次推动对应的遮挡柱下降,导致依次挡在发射端和接收端之间,使得对射装置的接收端收不到发射端发来的光线,从而生成完成卡接的提示信号。但是,由于动力盒是金属材料制成,位于外侧的对射装置的发射端发出的光线会在金属内壁产生反射,从而绕过遮挡柱反射至接收端,导致信号干扰,从而影响手术进程。
技术实现思路
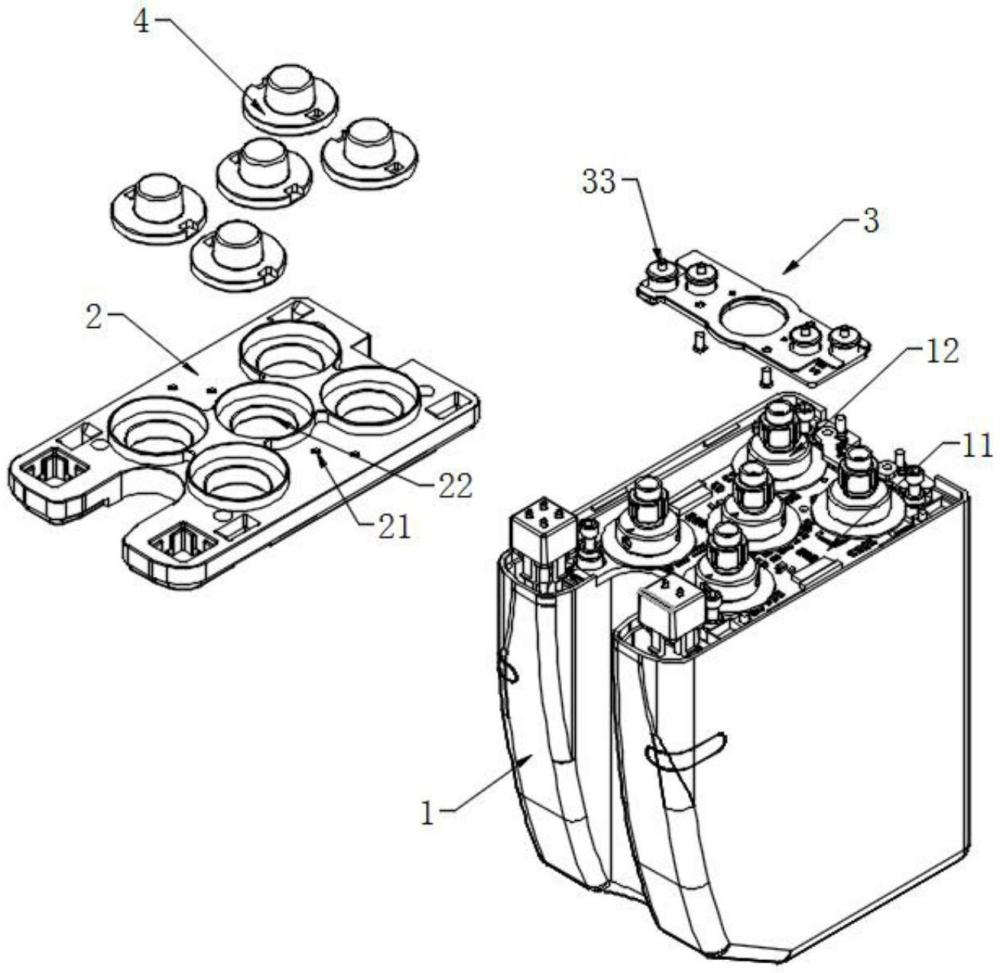
1、为了减少动力盒的侧壁将对射装置的发射端发出的光线反射到对射装置的接收端所造成的信号干扰,第一方面,本申请的部分实施例提供一种动力盒,包括:壳体,顶板和检测组件;
2、所述壳体为具有开口端的盒体,所述顶板覆盖在所述壳体的开口端,所述检测组件设置在所述壳体内部;
3、在所述检测组件设置有对射装置,所述对射装置包括相对设置的发射端和接收端,所述发射端出光方向中心射线与所述壳体的目标侧壁之间的角度在预设角度范围内,所述预设角度范围使得所述发射端的反射光强小于所述接收端的报警数值,且在部分遮挡时的直射光强大于接收端的报警数值,所述目标侧壁为与所述发射端出光方向中心射线相邻且不相交的壳体侧壁;
4、所述检测组件包括遮挡柱,所述遮挡柱可在轴向外力作用下伸入所述发射端和所述接收端之间。
5、在一些实施例中,所述检测组件包括至少两组所述对射装置;
6、一组所述对射装置的接收端设置在背离另一组所述发射端出光方向中心射线的位置,且该组所述对射装置的发射端背向设置在另一组所述接收端接收方向的位置。
7、在一些实施例中,所述检测组件的截面为矩形,所述对射装置平行于矩形的短边方向,在所述矩形的长边方向上,所述位于外侧的发射端的出光方向中心射线与所述矩形的长边方向之间的角度在预设角度范围内;
8、位于内侧的发射端的出光方向中心射线与所述矩形的长边方向之间的角度为90°。
9、在一些实施例中,还包括传动盘,所述壳体内部设置有动力设备,所述动力设备上设置有传动轴,所述顶板设置有传动轴孔,所述传动轴穿过所述传动轴孔与所述传动盘连接。
10、在一些实施例中,所述检测组件靠近所述动力设备的端面设置有四组对射装置,四组所述对射装置设置在所述检测组件的两侧,每侧设置有两组对射装置。
11、在一些实施例中,所述检测组件设置在所述顶板靠近动力设备的端面。
12、在一些实施例中,所述顶板上设置有装配孔,所述遮挡柱靠近所述顶板的一端设置有固定盘,所述固定盘的一侧设置有凸起部,所述凸起部与所述装配孔插接;
13、所述固定盘的另一侧设置有复位件,所述复位件由弹性材料制成。
14、在一些实施例中,所述检测组件设置有固定销,所述固定销与所述固定盘同侧设置,所述固定销与所述顶板靠近所述动力设备的端面限位固定。
15、第二方面,本申请的部分实施例还提供一种手术机器人从操纵臂,包括从操纵臂主体、器械盒、无菌隔离板以及第一方面记载的动力盒,所述动力盒可移动设置在所述操纵臂主体上,所述器械盒通过所述无菌隔离板卡接固定在所述动力盒上。
16、第三方面,本申请的部分实施例还提供一种手术机器人,手术机器人主控制臂和第二方面提供的手术机器人从操纵臂。
17、由以上技术方案可知,本申请提供一种动力盒、手术机器人从操纵臂及手术机器人,所述动力盒包括壳体、顶板和检测组件,壳体为具有开口端的盒体,顶板覆盖在壳体的开口端,检测组件设置在壳体内容。检测组件上设置有对射装置,对射装置的发射端的出光方向中心射线与壳体的目标侧壁之间的角度在预设角度范围内检测组件包括遮挡柱,遮挡柱可在轴向外力作用下伸入发射端和接收端之间。本申请通过将对射装置中的发射端与目标侧壁之间形成偏移角度,降低发射至目标侧壁上的光束光强,从而在遮挡柱遮挡发射端的直射光束时,反射光束的光强不足以触发接收端的报警,减少信号干扰。
技术特征:
1.一种动力盒,其特征在于,包括:壳体,顶板和检测组件;
2.根据权利要求1所述的动力盒,其特征在于,所述检测组件包括至少两组所述对射装置;
3.根据权利要求2所述的动力盒,其特征在于,所述检测组件的截面为矩形,所述对射装置平行于矩形的短边方向,在所述矩形的长边方向上,位于外侧的发射端的出光方向中心射线与所述矩形的长边方向之间的角度在预设角度范围内;
4.根据权利要求2所述的动力盒,其特征在于,还包括传动盘,所述壳体内部设置有动力设备,所述动力设备上设置有传动轴,所述顶板设置有传动轴孔,所述传动轴穿过所述传动轴孔与所述传动盘连接。
5.根据权利要求4所述的动力盒,其特征在于,所述检测组件靠近所述动力设备的端面设置有四组对射装置,四组所述对射装置设置在所述检测组件的两侧,每侧设置有两组对射装置。
6.根据权利要求4所述的动力盒,其特征在于,所述检测组件设置在所述顶板靠近动力设备的端面。
7.根据权利要求4所述的动力盒,其特征在于,所述顶板上设置有装配孔,所述遮挡柱靠近所述顶板的一端设置有固定盘,所述固定盘的一侧设置有凸起部,所述凸起部与所述装配孔插接;
8.根据权利要求7所述的动力盒,其特征在于,所述检测组件设置有固定销,所述固定销与所述固定盘同侧设置,所述固定销与所述顶板靠近所述动力设备的端面限位固定。
9.一种手术机器人从操纵臂,其特征在于,包括从操纵臂主体、器械盒、无菌隔离板以及权利要求1-8任意一项所述的动力盒,所述动力盒可移动设置在所述操纵臂主体上,所述器械盒通过所述无菌隔离板卡接固定在所述动力盒上。
10.一种手术机器人,其特征在于,包括手术机器人主控制臂和权利要求9所述的手术机器人从操纵臂。
技术总结
本申请涉及医疗器械技术领域,本申请提供一种动力盒、手术机器人从操纵臂及手术机器人,所述动力盒包括壳体、顶板和检测组件,壳体为具有开口端的盒体,顶板覆盖在壳体的开口端,检测组件设置在壳体内容。检测组件上设置有对射装置,对射装置的发射端的出光方向中心射线与壳体的目标侧壁之间的角度在预设角度范围内检测组件包括遮挡柱,遮挡柱可在轴向外力作用下伸入发射端和接收端之间。本申请通过将对射装置中的发射端与目标侧壁之间形成偏移角度,降低发射至目标侧壁上的光束光强,从而在遮挡柱遮挡发射端的直射光束时,反射光束的光强不足以触发接收端的报警,减少信号干扰。
技术研发人员:请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名
受保护的技术使用者:敏捷医疗科技(苏州)有限公司
技术研发日:20231121
技术公布日:2024/12/10
- 还没有人留言评论。精彩留言会获得点赞!