一种可移动智能颈椎牵引机器人的制作方法
本技术涉及颈椎牵引机器人,具体涉及一种可移动智能颈椎牵引机器人。
背景技术:
1、颈椎病是因颈椎间盘退变本身及其继发性的一系列病理改变,如局部组织肿涨淤血,颈椎增生,间隙变窄,椎节失稳、髓核突出或脱出,韧带肥厚,椎管狭窄等,压迫或刺激了颈部神经根、脊髓、椎动脉及颈部交感神经等组织而引起的一组综合症,颈椎牵引治疗在颈椎病的非术治疗中有着非常重要的地位,是神经根型颈椎病的常用治疗方法,颈椎的牵引治疗应在临床医生的指导下针对患者的病情调整牵引的角度、重量、时间、体位等,只有综合运用这些因素才能起到更好效果;
2、中国专利公告号cn105853149a公开了一种颈椎牵引康复机器人及其附属理疗组件,其可以实现颈椎牵引角度、方向和牵引力大小的精准调控,对颈椎疾病患者可以进行全方位的康复治疗,大大缩短颈椎疾病的康复时间,但上述技术中的支柱、座椅独立设置,这导致其体积庞大,难以居家实用,患者不得不前往医院进行牵引治疗,造成了严重的治疗负担,为此本实用新型提供一种可移动智能颈椎牵引机器人用以解决上述问题。
技术实现思路
1、(1)要解决的技术问题
2、本实用新型的目的在于克服现有技术的不足,适应现实需要,提供一种可移动智能颈椎牵引机器人,以解决上述技术问题。
3、(2)技术方案
4、为了实现本实用新型的目的,本实用新型所采用的技术方案为:
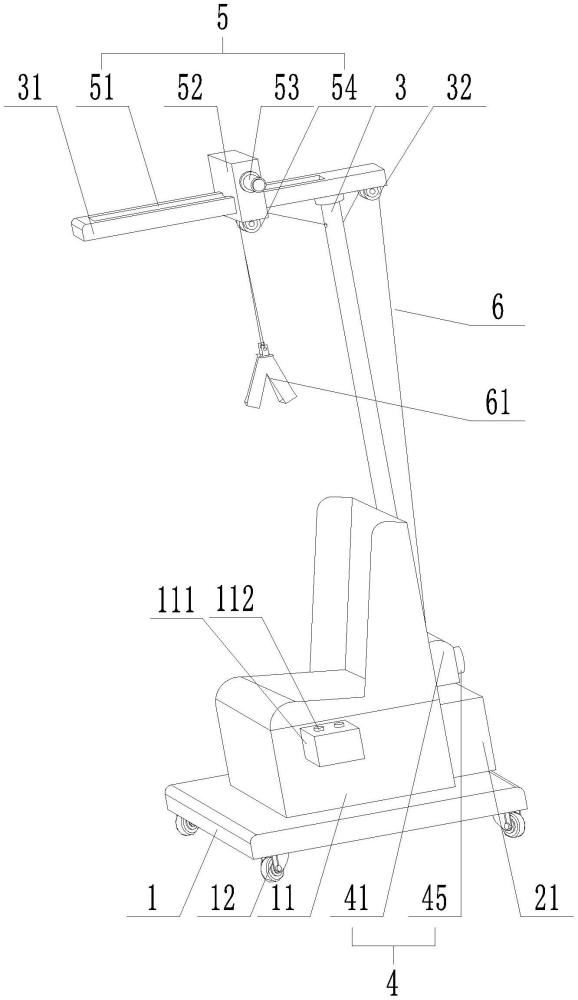
5、一种可移动智能颈椎牵引机器人,包括底座,所述底座上侧固定有按摩座椅,所述底座上侧安装有角度调节组件,所述角度调节组件用以带动竖直臂作水平摆动,所述竖直臂的底部一侧安装有拉力调节组件,所述竖直臂的顶端固定有水平臂,所述水平臂一端下方安装有平移组件,所述平移组件上设置有活动滑轮,且所述水平臂的另一端下侧固定有定滑轮,其中,所述拉力调节组件连接有牵引绳,所述牵引绳依次绕过定滑轮、活动滑轮后连接有牵引头套,且所述按摩座椅的扶手侧面安装有用以控制角度调节组件、拉力调节组件和平移组件运行的控制器,所述控制器上安装有控制按钮,所述控制按钮至少包括开关按钮与急停按钮。
6、进一步地,所述角度调节组件包括固定在底座上侧的动力箱,所述动力箱的上下内壁之间转动嵌设有竖直臂,且所述竖直臂的顶端穿出动力箱设置,所述动力箱的底壁上固定有第一伺服电机,所述第一伺服电机的输出端固定有主动齿轮,所述主动齿轮啮合连接有从动齿轮,所述从动齿轮固定套设在竖直臂的外侧。
7、进一步地,所述拉力调节组件包括固定在竖直臂底部一侧的收纳箱,所述收纳箱的两侧内壁之间转动连接有横轴,所述横轴外侧固定套设有蜗轮与线盘,所述收纳箱的外侧螺丝固定有第二伺服电机,所述第二伺服电机的输出端固定有蜗杆,所述蜗杆与蜗轮保持传动连接,且所述线盘的外侧缠绕设置有牵引绳,所述牵引绳穿出收纳箱顶壁设置。
8、进一步地,所述平移组件包括位于水平臂上侧凹槽以及滑动套设在水平臂外侧的密闭箱,所述凹槽底部密布设置有多个凸齿,所述密闭箱一侧螺丝固定有第三伺服电机,所述第三伺服电机的输出端固定连接有啮齿轮,所述啮齿轮可沿凹槽底部的凸齿滚动,所述密闭箱下侧固定有活动滑轮。
9、进一步地,所述底座上侧固定有按摩座椅,所述底座下侧四角均安装有脚轮,所述脚轮上均安装有轮刹。
10、有益效果:
11、本实用新型中,水平臂以竖直臂为轴心作水平摆动,活动滑轮可沿着水平臂作前后移动,能够完成对颈椎前屈、后伸及左右侧屈的牵引,由线盘缠绕牵引绳,使得牵引绳向上提拉牵引头套,实现对颈椎牵引角度、方向和牵引力大小的控制,自由度高,体积小,按压急停按钮,能够随时解除牵引效果,可避免危险情况发生,能够满足颈椎病患者在医院、社区及家庭内进行康复治疗的需要。
技术特征:
1.一种可移动智能颈椎牵引机器人,包括底座(1),所述底座(1)上侧固定有按摩座椅(11),其特征在于,所述底座(1)上侧安装有角度调节组件(2),所述角度调节组件(2)用以带动竖直臂(3)作水平摆动,所述竖直臂(3)的底部一侧安装有拉力调节组件(4),所述竖直臂(3)的顶端固定有水平臂(31),所述水平臂(31)一端下方安装有平移组件(5),所述平移组件(5)上设置有活动滑轮(54),且所述水平臂(31)的另一端下侧固定有定滑轮(32),其中,所述拉力调节组件(4)连接有牵引绳(6),所述牵引绳(6)依次绕过定滑轮(32)、活动滑轮(54)后连接有牵引头套(61),且所述按摩座椅(11)的扶手侧面安装有用以控制角度调节组件(2)、拉力调节组件(4)和平移组件(5)运行的控制器(111),所述控制器(111)上安装有控制按钮(112),所述控制按钮(112)至少包括开关按钮与急停按钮。
2.如权利要求1所述的一种可移动智能颈椎牵引机器人,其特征在于:所述角度调节组件(2)包括固定在底座(1)上侧的动力箱(21),所述动力箱(21)的上下内壁之间转动嵌设有竖直臂(3),且所述竖直臂(3)的顶端穿出动力箱(21)设置,所述动力箱(21)的底壁上固定有第一伺服电机(22),所述第一伺服电机(22)的输出端固定有主动齿轮(23),所述主动齿轮(23)啮合连接有从动齿轮(24),所述从动齿轮(24)固定套设在竖直臂(3)的外侧。
3.如权利要求1所述的一种可移动智能颈椎牵引机器人,其特征在于:所述拉力调节组件(4)包括固定在竖直臂(3)底部一侧的收纳箱(41),所述收纳箱(41)的两侧内壁之间转动连接有横轴(42),所述横轴(42)外侧固定套设有蜗轮(43)与线盘(44),所述收纳箱(41)的外侧螺丝固定有第二伺服电机(45),所述第二伺服电机(45)的输出端固定有蜗杆(46),所述蜗杆(46)与蜗轮(43)保持传动连接,且所述线盘(44)的外侧缠绕设置有牵引绳(6),所述牵引绳(6)穿出收纳箱(41)顶壁设置。
4.如权利要求1所述的一种可移动智能颈椎牵引机器人,其特征在于:所述平移组件(5)包括位于水平臂(31)上侧凹槽(51)以及滑动套设在水平臂(31)外侧的密闭箱(52),所述凹槽(51)底部密布设置有多个凸齿,所述密闭箱(52)一侧螺丝固定有第三伺服电机(53),所述第三伺服电机(53)的输出端固定连接有啮齿轮(55),所述啮齿轮(55)可沿凹槽(51)底部的凸齿滚动,所述密闭箱(52)下侧固定有活动滑轮(54)。
5.如权利要求1所述的一种可移动智能颈椎牵引机器人,其特征在于:所述底座(1)下侧四角均安装有脚轮(12),所述脚轮(12)上均安装有轮刹。
技术总结
本技术涉及一种可移动智能颈椎牵引机器人,涉及颈椎牵引机器人技术领域,包括底座,所述底座上侧安装有角度调节组件,所述角度调节组件用以带动竖直臂作水平摆动,所述竖直臂的底部一侧安装有拉力调节组件,所述竖直臂的顶端固定有水平臂,所述水平臂一端下方安装有平移组件,水平臂以竖直臂为轴心作水平摆动,活动滑轮可沿着水平臂作前后移动,能够完成对颈椎前屈、后伸及左右侧屈的牵引,由线盘缠绕牵引绳,使得牵引绳向上提拉牵引头套,实现对颈椎牵引角度、方向和牵引力大小的控制,自由度高,体积小,按压急停按钮,能够随时解除牵引效果,可避免危险情况发生,能够满足颈椎病患者在医院、社区及家庭内进行康复治疗的需要。
技术研发人员:李春磊,张锦明,张思睿
受保护的技术使用者:李春磊
技术研发日:20231212
技术公布日:2024/9/2
- 还没有人留言评论。精彩留言会获得点赞!