一种基于对称双平行四杆构型的眼科手术机器人
本技术涉及医疗机器人,具体是涉及一种基于对称双平行四杆构型的眼科手术机器人。
背景技术:
1、随着医学影像技术、传感器技术及机器人技术的快速发展,医疗机器人已成为先进机器人领域的重要研究方向,机器人辅助外科手术在操作灵活性、稳定性及精准性等方面具有明显优势,很好地改善了医生手术震颤问题,也很好地规避了由于医生疲劳引起的手术事故,促进了眼科手术向微创化、智能化、精准化方向发展。
2、在进行眼科手术的过程中,许多术式如白内障手术都需要围绕眼内一点进行操作,而这限制了末端执行器最多有四个自由度:绕刺入点的三个转动自由度和沿器械轴线方向的一个移动自由度。远程运动中心(remote center of motion,rcm))机构就是针对上述要求而设计的一类特殊机构。该机构的特点是机构的输出构件可以绕空间中某固定点转动以及沿着过该固定点的轴线移动,并且在此固定点处并没有实际的转动副存在。rcm机构可以预留出足够的手术空间,并且通过机构限制自由度,安全度相较于算法控制更高,已被广泛应用于医疗机器人的结构设计中。由于手术进给量、各种自由度要求不同,产生了多种不同构型的rcm机构。加州大学洛杉矶分校的wilson等人设计了一种机器人系统,其独特的弧形导轨构型的rcm机构使得机器人的腕关节、肘关节和末端都获得了较大的运动范围;哥伦比亚大学的wei等于2007年提出了一种配有眼内灵巧操作器的双臂机器人,每个机械臂由2自由度的眼内灵巧操作器和6自由度的并联机械臂组成,其末端操作精度优于5μm;黄龙等基于仿图仪的结构设计了一种平面rcm机构,其在基座铰链处实现了机构的进给自由度,这种构型不仅减轻了机构末端的负载,而且提高了rcm机构的刚性。
3、目前,许多rcm机构未实现末端执行器的进给运动,其驱动机构大都安装在机构末端,增加了rcm机构末端的重量及转动惯量,并且一定程度上减小了医生的手术空间,对rcm点的精度有不利影响。
技术实现思路
1、实用新型目的:针对以上缺点,本实用新型提供一种提高rcm点的定位精度的可安拆的基于对称双平行四杆构型的眼科手术机器人。
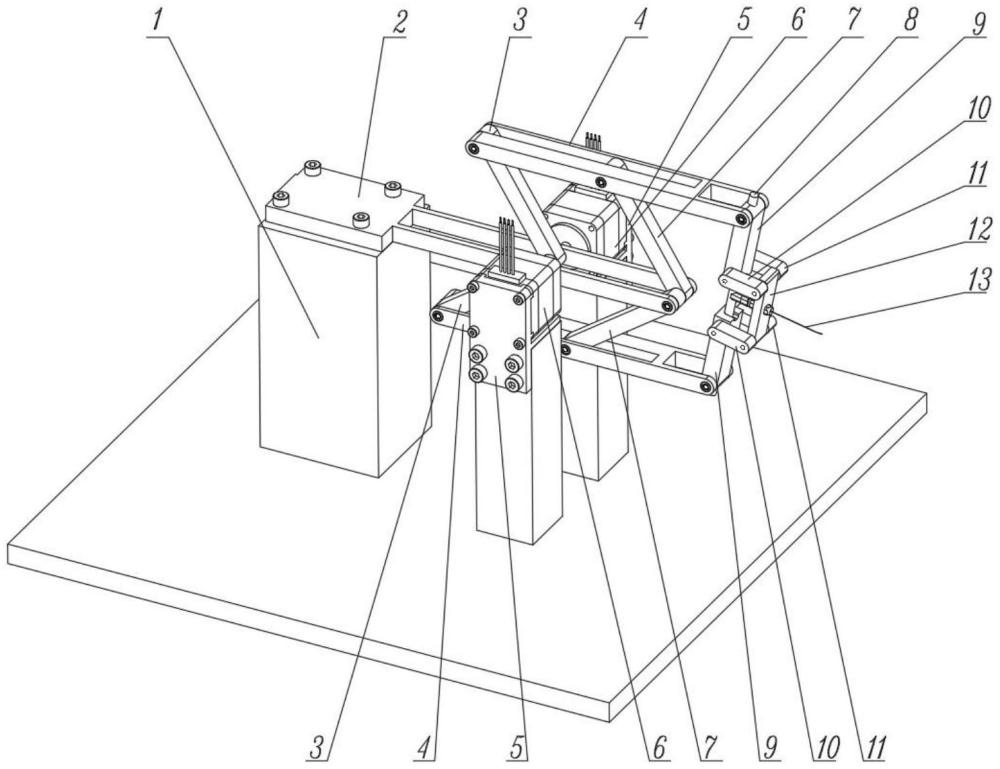
2、技术方案:为解决上述问题,本实用新型采用一种基于对称双平行四杆构型的眼科手术机器人,包括基部、固定在基部上的传动系统以及末端执行器;其中所述传动系统包括支链基座杆、两个支链驱动电机、两个支链以及位于两个支链末端的执行器定位件,每个支链均包括与支链驱动电机旋转连接且与支链基座杆铰接的第一杆件、与支链基座杆铰接的第二杆件、与第一杆件和第二杆件均铰接的第三杆件,执行器定位件包括两个与第三杆件铰接的滑块、固定末端执行器的t型导轨,所述t型导轨两端与两个滑块移动副连接。
3、进一步的,所述执行器定位件还包括两个分别与两个滑块铰接的第四杆件、两个分别与两个滑块铰接的第五杆件、与两个第四杆件和两个第五杆件均铰接的导向块,所述导向块设置导向通孔,所述末端执行器一端与t型导轨固定连接,另一端穿过导向块的导向通孔。所述末端执行器延伸方向垂直于t型导轨与滑块的相对运动方向。
4、进一步的,在任一支链中,所述支链基座杆与所述第一杆件、第二杆件、第三杆件铰接围成一平行四边形,两支链关于所述支链基座杆对称。
5、进一步的,两个支链驱动电机以相同角速度同方向旋转或者以相同角速度反方向旋转。
6、进一步的,所述第三杆件上与所述滑块的铰接点的运动轨迹为一圆弧,圆弧半径满足:
7、r=l1
8、其中,r为圆弧半径,l1为所述第一杆件或第二杆件有效杆长,即所述第一杆件上两铰接圆孔圆心之间的距离。
9、进一步的,所述基部包括基座(1)、固定在基座上电机支架(5),支链基座杆固定在基座上,所述电机架(5)用以固定支链驱动电机。
10、进一步的,所述末端执行器的轴线始终过所述基座(1)坐标系下的固定一点,该点坐标为
11、prcm=(l3,0)
12、其中,prcm是所述固定一点的坐标,称为远程运动中心点,l3是所述第三杆件(4)的有效杆长。
13、进一步的,所述第三杆件的有效杆长大于支链基座杆有效杆长的两倍。
14、进一步的,所述驱动电机带有编码器作为位置反馈。
15、有益效果:本实用新型相对于现有技术,其优点是:
16、(1)两个支链采用并联结构,刚度较高;
17、(2)动力源均位于基座,减小手术操作时末端的占用空间以及转动惯量。
技术特征:
1.一种基于对称双平行四杆构型的眼科手术机器人,其特征在于,包括基部、固定在基部上的传动系统以及末端执行器(13);其中所述传动系统包括支链基座杆(2)、两个支链驱动电机(6)、两个支链以及位于两个支链末端的执行器定位件,每个支链均包括与支链驱动电机(6)旋转连接且与支链基座杆(2)铰接的第一杆件(3)、与支链基座杆(2)铰接的第二杆件(7)、与第一杆件(3)和第二杆件(7)均铰接的第三杆件(4),执行器定位件包括两个与第三杆件(4)铰接的滑块(9)、固定末端执行器(13)的t型导轨(8),所述t型导轨(8)两端与两个滑块(9)移动副连接。
2.根据权利要求1所述的眼科手术机器人,其特征在于,所述执行器定位件还包括两个分别与两个滑块(9)铰接的第四杆件(10)、两个分别与两个滑块(9)铰接的第五杆件(11)、与两个第四杆件(10)和两个第五杆件(11)均铰接的导向块(12),所述导向块(12)设置导向通孔,所述末端执行器(13)一端与t型导轨(8)固定连接,另一端穿过导向块(12)的导向通孔。
3.根据权利要求2所述的眼科手术机器人,其特征在于,所述末端执行器(13)延伸方向垂直于t型导轨(8)与滑块(9)的相对运动方向。
4.根据权利要求1所述的眼科手术机器人,其特征在于,在任一支链中,所述支链基座杆(2)与所述第一杆件(3)、第二杆件(7)、第三杆件(4)铰接围成一平行四边形,两支链关于所述支链基座杆(2)对称。
5.根据权利要求1所述的眼科手术机器人,其特征在于,两个支链驱动电机(6)以相同角速度同方向旋转或者以相同角速度反方向旋转。
6.根据权利要求1所述的眼科手术机器人,其特征在于,所述第三杆件(4)上与所述滑块(9)的铰接点的运动轨迹为一圆弧,圆弧半径满足:
7.根据权利要求1所述的眼科手术机器人,其特征在于,所述基部包括基座(1)、固定在基座上电机支架(5),支链基座杆(2)固定在基座上,所述电机支架(5)用以固定支链驱动电机(6)。
8.根据权利要求7所述的眼科手术机器人,其特征在于,所述末端执行器(13)的轴线始终过所述基座(1)坐标系下的固定一点,该点坐标为
9.根据权利要求8所述的眼科手术机器人,其特征在于,所述第三杆件的有效杆长大于支链基座杆的有效杆长的两倍。
10.根据权利要求1所述的眼科手术机器人,其特征在于,所述支链驱动电机(6)带有编码器作为位置反馈。
技术总结
本技术公开了一种基于对称双平行四杆构型的眼科手术机器人,包括基部、固定在基部上的传动系统以及末端执行器;其中所述传动系统包括支链基座杆、两个支链驱动电机、两个支链以及位于两个支链末端的执行器定位件,每个支链均包括与支链驱动电机旋转连接且与支链基座杆铰接的第一杆件、与支链基座杆铰接的第二杆件、与第一杆件和第二杆件均铰接的第三杆件,执行器定位件包括两个与第三杆件铰接的滑块、固定末端执行器的T型导轨,所述T型导轨两端与两个滑块移动副连接。两个支链采用并联结构,刚度较高;动力源均位于基座,减小手术操作时末端的占用空间以及转动惯量。
技术研发人员:段榆洲,曹振强,曾香云,周顺,凌杰,朱玉川
受保护的技术使用者:南京航空航天大学
技术研发日:20231219
技术公布日:2024/9/19
- 还没有人留言评论。精彩留言会获得点赞!