一种用于腹部按摩的机器人末端执行器
本发明提供一种用于腹部按摩的机器人末端执行器,属于按摩器械领域。
背景技术:
1、在中医学说中,推脾运胃按摩法是一种针对呼吸系统疾病、运动系统疾病以及循环系统疾病等症状的常见按摩手法,但是目前对腹部的按摩还停留在人手按摩上,具体按摩方式为:人躺在按摩床上,面朝上,按摩师站于一侧,略向前俯身,利用双掌对腹部肌群进行按摩。为了达到按摩效果,按摩师需要用力对腹部进行长时间的揉动按摩,由于按摩是一个重复的运动过程,因此这也是一项繁琐、费力、耗时的工作。近几年,随着中医按摩疗法的推广以及康复按摩理疗的兴起,机器人技术被广泛的应用在按摩理疗领域,产生了多种多样的按摩专用末端执行器,但是现有的按摩器械通常针对人体腿部或背部,没有针对腹部按摩的专用按摩器械,所以本发明基于中医推脾运胃按摩法针对腹部按摩提出了一种机器人末端执行器。
技术实现思路
1、本发明针对现有技术不足,提供一种用于腹部按摩的机器人末端执行器。
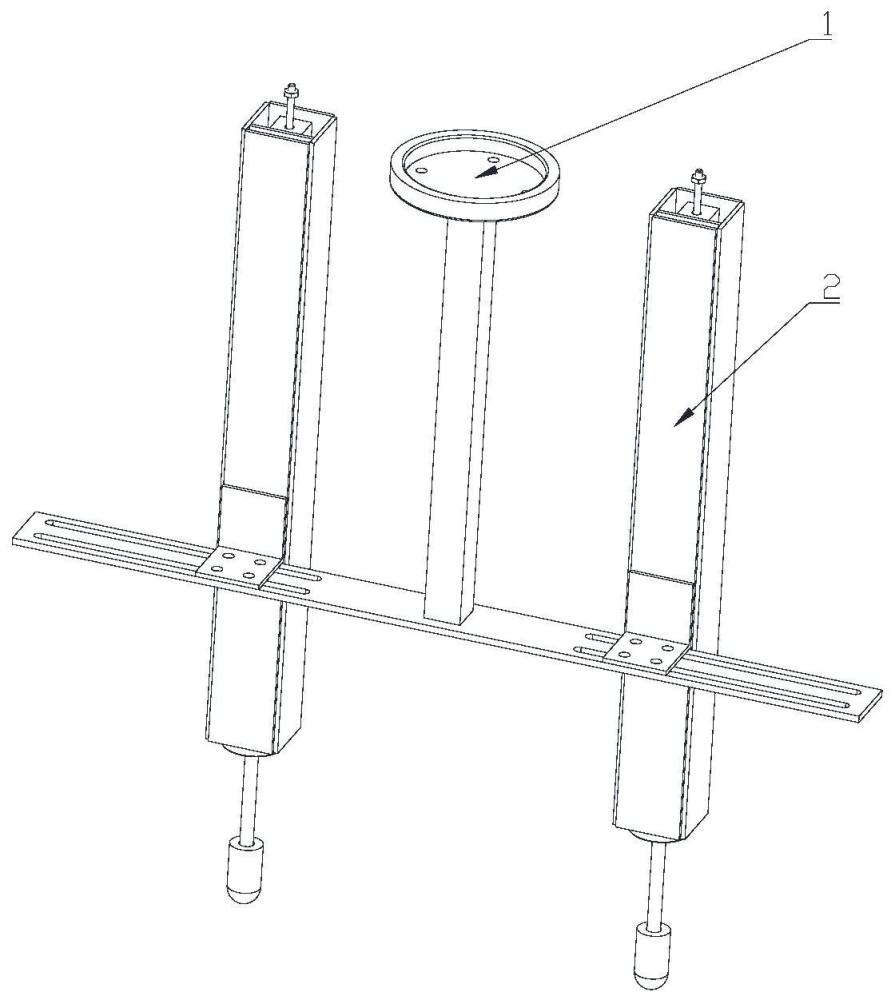
2、本发明其特征在于,由支撑架1和按摩终端2两部分组成,支撑架1一端通过通用连接口101连接在多轴机器人上,另一端通过连接板104与按摩终端2连接。
3、本装置在使用时,参阅图1,首先由工作人员调整支撑架1两侧的按摩终端2至预定位置,来配合不同患者的身材尺寸,随后由多轴机器人移动至患者需按摩位置上方,并随多轴机器人执行按摩动作,在按摩终端2中设置有电磁铁202和压力传感器205,压力传感器205在多轴机器人开始执行按摩动作时实时对按摩压力进行检测,并将检测数据传输至计算机,在多轴机器人开始执行按摩动作时,电磁铁202中的推杆处于伸出状态,当压力传感器205中的检测数据发生变化时,计算机也会随时调整电磁铁202中的电流强度,进而使电磁铁202中的推杆可以实时适应按摩压力,提升患者的舒适性,当压力传感器205中的检测数据超过安全阀值时,计算机自动使电磁铁202中的推杆缩回,进而使按摩头208离开人体,由于电磁力具有响应速度快的特点,此操作可以极大的提高患者的安全性。
技术特征:
1.一种用于腹部按摩的机器人末端执行器,其特征在于,由支撑架(1)和按摩终端(2)两部分组成,支撑架(1)一端通过通用连接口101连接在多轴机器人上,另一端通过连接板(104)与按摩终端(2)连接。
2.根据权利要求1所述的一种用于腹部按摩的机器人末端执行器,其特征在于:所述支撑架(1)由通用连接口(101),支撑梁(102),横板(103)和连接板(104)组成,连接口(101)与支撑梁(102)连接,支撑梁(102)与横板(103)连接,连接板(104)一端与横板(103)连接,另一端与按摩终端(2)连接。
3.根据权利要求1所述的一种用于腹部按摩的机器人末端执行器,其特征在于:所述按摩终端(2)由支撑架(201)、电磁铁(202)、直线轴承(203)、连接杆(204)、压力传感器(205)、直线轴承(206)、推杆(207)和按摩头(208)组成,电磁铁(202)固定在支撑架(201)上,连接杆(204)一端与电磁铁(202)连接,另一端与压力传感器(205)连接,并从直线轴承(203)中穿过,直线轴承(203)和直线轴承(206)分别固定在支撑架(201)上,推杆(207)一端与压力传感器(205)连接,另一端与按摩头(208)连接,并从直线轴承(206)中穿过。
技术总结
近几年,随着中医按摩疗法的推广以及康复按摩理疗的兴起,机器人技术被广泛的应用在按摩理疗领域,产生了多种多样的按摩专用末端执行器,但是现有的按摩器械通常针对人体腿部或背部,没有针对腹部按摩的专用按摩器械,所以本发明基于中医推脾运胃按摩法针对腹部按摩提出了一种机器人末端执行器。由支撑架1和按摩终端2两部分组成,在使用时,压力传感器205在多轴机器人开始执行按摩动作时实时对按摩压力进行检测,并将检测数据传输至计算机,由计算机控制电磁铁202中电流的强度,进而改变电磁铁的推力,配合多轴机器人完成按摩任务,由于电磁力具有响应速度快的特点,此操作可以极大的提高按摩过程的舒适性和安全性。
技术研发人员:张邦成,皮旭阳,姜大伟,吴兴全,赵占营,林铂,董贤达,毕鹏,戴佳晟
受保护的技术使用者:长春工业大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!