外科工具的制作方法
本公开涉及具有一个或多个致动器的外科机器人工具的接合、校准和/或附加控制。
背景技术:
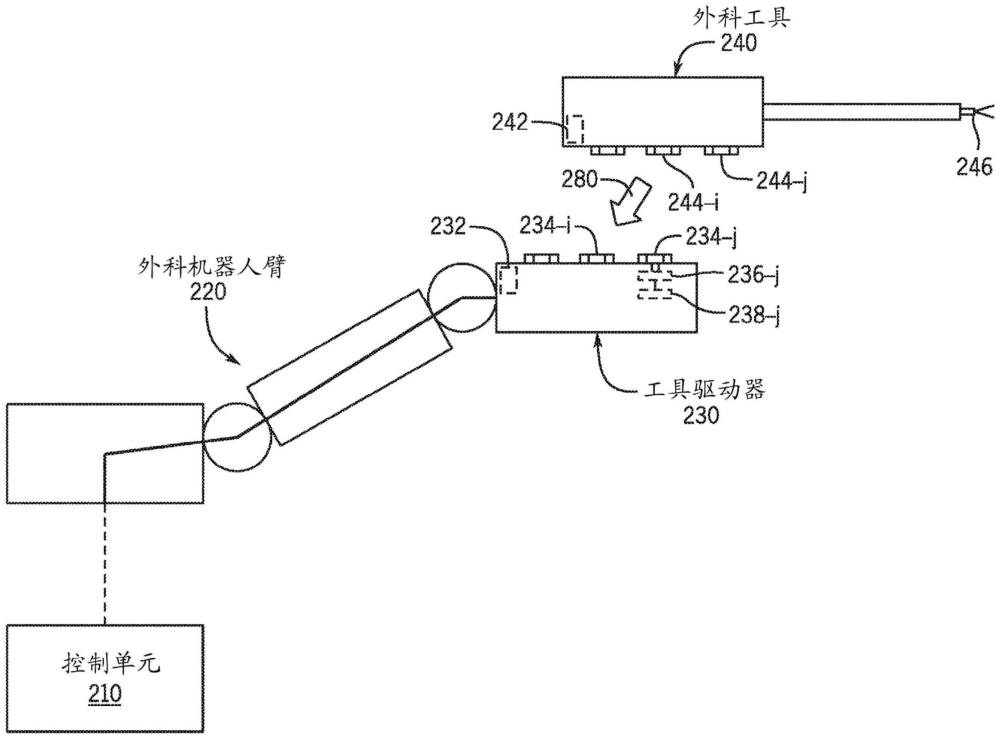
1、外科机器人系统给予操作员或用户,诸如操作外科医生,执行外科手术的一个或多个动作的能力。在该外科机器人系统中,外科工具或器械(诸如内窥镜、夹钳、切割工具、展开器、针头、能量发射器等)机械地耦接到外科机器人臂的机器人接头,使得机器人接头的移动或致动直接引起工具的一部分的旋转、枢转或直线移动。一旦工具附接到(例如,接触)臂中的工具驱动器,操作员命令就可能引起移动并激活所附接工具的功能。
2、由于外科手术的不同性质,在外科手术之前和期间可以选择性地将不同的外科工具或器械附接到外科机器人系统的同一臂。为了避免外科手术期间的设备故障,重要的是外科工具或器械不仅附接到外科机器人臂的机器人接头而且与外科机器人臂的机器人接头机械地接合。也就是说,外科手术期间使用外科工具之前,外科工具中赋予运动或启用器械特征的激活的机构应该与外科机器人系统的臂中的工具驱动器中的致动器机械地接合。在例如执行接合时出现了与检测接合或接合同步相关的挑战,并且在外科工具的后续操作中出现了与回退和安全程序相关的挑战。
技术实现思路
1、本文公开了一种机器人辅助外科机电系统,其设计用于外科医生执行微创外科手术。可以将一组兼容工具附接到安装至机器人臂的远侧端部的器械驱动器/从器械驱动器拆卸,使得外科医生能够执行各种手术任务。器械驱动器可提供进入手术部位的体内通路、通过无菌接合部对兼容工具进行的机械致动、以及通过无菌接合部和用户接触点与兼容工具的通信。
2、无限运动范围是外科器械的旋转轴线的期望临床特征。然而,在这种设计中缺乏机械硬挡块使得工具驱动器与器械的接合具有挑战性。描述了当器械没有硬挡块约束其运动并且可以自由移动时,将旋转致动器的驱动电机与器械的滚动工具盘接合的方法或设备。示例性方法可以包括检测外科工具到工具驱动器的附接,使得外科工具的滚动工具盘能够与工具驱动器的驱动盘接合,通过旋转电机驱动驱动盘,并且确定自致动以来旋转电机的测量扭矩是否超过预设扭矩阈值达预设时间段。
3、描述了在耦合机构的接合和归位期间同步两个电机的方法或设备。使用两个或更多个耦接的电机,在通过该耦合机构约束的该两个或更多个电机之间划分端部执行器负载。该方法或设备包括两级方法以安全地同步该耦合系统中的电机,并使该耦合机构接合并抵靠其硬挡块归位。示例性方法可以包括将低扭矩命令发送到耦接到外科工具的闭合接头的第一电机和耦接到外科工具的闭合接头的第二电机,确定该第一电机和该第二电机是否满足一个或多个保持接合标准,响应于该第一电机和该第二电机满足该一个或多个保持接合标准而向该第一电机和该第二电机发送高扭矩命令。
4、还描述了校准和控制具有反冲和/或顺应性的受约束机构的方法或设备。在外科器械中,端部执行器的机械设计以及驱动系的特性可以表现出反冲和/或顺应性。方法或设备被配置为控制反冲和/或顺应性并实现可接受的位置跟踪性能。示例性方法可以包括接收描述外科工具的端部执行器或致动器的期望位置的位置命令以驱动外科工具的端部执行器,将该期望位置转换成与该致动器相关联的命令,计算反冲补偿项以补偿反冲源以及基于该反冲补偿项和用于该端部执行器的该命令发送用于该致动器的电机命令。
5、最后,描述了提供安全性增强的方法或设备。为了此目标,算法可以考虑器械与其环境之间的相互作用而主动调节致动器运动。示例性方法包括接收用于外科工具的接头的初始接头命令,基于外科工具的接头的电机的电机扭矩来确定接头扭矩,基于与接头相关联的有效几何形状(例如,长度)并且基于接头扭矩来计算尖端力,将尖端力与预定阈值进行比较,响应于估计的尖端力和预定阈值的比较结果来计算导纳控制补偿项,以及基于导纳控制补偿项和初始接头命令来生成用于电机的命令。
6、至少一个所公开的实施方案涉及用于外科工具或外科机器人系统的系统和方法。由多个驱动盘驱动的耦合装置对应于第一电机和第二电机。一个或多个处理器被配置为向第一电机发送低扭矩命令,向第二电机发送该低扭矩命令,确定该第一电机和该第二电机是否满足一个或多个保持接合标准,响应于该第一电机和该第二电机满足该一个或多个保持接合标准而向该第一电机发送高扭矩命令,并且响应于该第一电机和该第二电机满足该一个或多个保持接合标准而向该第二电机发送该高扭矩命令。
7、至少一个所公开的实施方案涉及用于外科工具或外科机器人系统的系统和方法。外科工具的端部执行器被耦接到工具驱动器。致动器由工具驱动器的电机驱动并且被配置为驱动端部执行器的自由度。一个或多个处理器被配置为接收描述端部执行器的期望位置的位置命令,将该期望位置转换成与用于与该端部执行器相关联的接头的命令,计算补偿项以补偿反冲和/或顺应性的迟滞源,并且基于该补偿项和用于该端部执行器的该命令发送用于与该致动器耦接的该电机的电机命令。
8、至少一个所公开的实施方案涉及用于外科工具或外科机器人系统的系统和方法。工具驱动器的致动器或电机被配置为操作工具的接头。一个或多个处理器被配置为接收用于工具的接头的初始接头命令,基于电机或致动器的电机扭矩以及电机到接头的扭矩映射来确定接头扭矩,基于与接头相关联的有效长度并且基于接头扭矩来计算尖端力,将尖端力与预定阈值进行比较,响应于该尖端力超过该预定阈值而计算导纳控制补偿项,并且基于该导纳控制补偿项和该初始接头命令来生成用于电机或致动器的命令。
技术特征:
1.一种外科机器人系统,包括:
2.根据权利要求1所述的外科机器人系统,其中所述耦合装置是用于外科工具的闭合接头的轭机构。
3.根据权利要求2所述的外科机器人系统,其中所述耦合装置提供硬挡块以抑制对应于所述第一电机和所述第二电机的所述多个驱动盘之间的相对运动。
4.根据权利要求1所述的外科机器人系统,所述一个或多个处理器被配置为:
5.根据权利要求4所述的外科机器人系统,其中所述一个或多个归位标准包括扭矩条件,所述扭矩条件包括所述第一电机的第一扭矩与所述第二电机的第二扭矩之间的差。
6.根据权利要求4所述的外科机器人系统,其中所述一个或多个归位标准包括速度条件,其中所述速度条件是包括零速度的范围。
7.根据权利要求4所述的外科机器人系统,所述一个或多个处理器被配置为:
8.根据权利要求1所述的外科机器人系统,其中选择所述低扭矩命令以克服与所述多个驱动盘相关联的摩擦力。
9.根据权利要求1所述的外科机器人系统,其中所述一个或多个保持接合标准包括所述多个驱动盘中的一个驱动盘的速度和所述多个驱动盘中的一个驱动盘的扭矩。
10.根据权利要求1所述的外科机器人系统,所述一个或多个处理器被配置为:
11.根据权利要求1所述的外科机器人系统,还包括:
12.根据权利要求1所述的外科机器人系统,所述一个或多个处理器被配置为:
13.根据权利要求12所述的外科机器人系统,其中所述故障消息包括从所述机器人系统拆卸器械的指令。
14.根据权利要求12所述的外科机器人系统,其中所述故障消息包括指示故障的数据。
15.一种用于外科工具的闭合接头的第一电机和第二电机的操作的方法,所述方法包括:
16.根据权利要求15所述的方法,还包括:
17.根据权利要求15所述的方法,还包括:
18.根据权利要求17所述的方法,其中所述故障消息包括拆卸器械的指令或者包括指示故障的数据。
19.一种外科工具的工具驱动器,所述工具驱动器包括:
20.根据权利要求19所述的工具驱动器,其中所述耦合装置包括用于所述外科工具的闭合接头的轭机构。
技术总结
所公开的实施方案涉及用于外科工具或外科机器人系统的系统和方法。工具驱动器被耦接到机器人臂的远侧端部并且包括由旋转电机驱动的滚动驱动盘。一个或多个处理器被配置为检测外科工具到该工具驱动器的附接。该外科工具包括与该工具驱动器的该滚动驱动盘接合的滚动工具盘,通过该旋转电机致动该滚动驱动盘,确定自该致动以来该旋转电机的测量扭矩超过预设扭矩阈值达预设时间段,并且报告该滚动驱动盘与该滚动工具盘之间的成功接合。
技术研发人员:A·阿萨迪恩,A·哈里里,A·达道
受保护的技术使用者:威博外科公司
技术研发日:
技术公布日:2024/5/27
- 还没有人留言评论。精彩留言会获得点赞!