一种能够进行腕手部姿势控制的气动康复手套
本申请涉及医疗器械,尤其涉及一种能够进行腕手部姿势控制的气动康复手套。
背景技术:
1、对于中枢神经系统损伤患者(如卒中偏瘫患者),经常遗留上肢及手功能障碍。即使经过正规的康复训练,患者可能仅保留一部分肩肘活动能力,而无腕手功能。患者出院后,因为腕手功能的缺失,直接导致患者无法使用受损手完成“功能性抓握”相关的日常生活动作,如“喝水”、“进餐”等。患者多次尝试失败后,可能进而放弃使用受损上肢,造成严重的上肢和手部“废用”。
2、为了解决上述问题,需要一种能够让中枢神经损伤患者日常方便佩戴使用、可实现简单“对指”以完成功能性抓握、总体质量较轻便于减轻受损上肢的负担的器械。现阶段符合上述要求的手部康复装置有外骨骼机器手和气动康复手套。
3、外骨骼机器手利用五个直线电机推动一系列连锁机构形成手指的“张抓”动作,带动患者手指进行被动运动。但由于其具有金属结构和电机驱动装置,因此总体重量较重。另外由于其缺乏腕部固定装置且佩戴不便,所以只能作为手部“训练工具”,而不能在现实生活中进行辅助使用。
4、气动康复手套主要通过弹性手套和附着在其上的波纹管带动患者手指进行被动运动,整体质量轻,便于患者佩戴。气动康复手套通过导气管对波纹管的充气和放气,改变波纹管的形状,带动手指进行运动。因为手套为柔性结构,故不能对手部进行有效的姿势控制,气动康复手套只能进行“集团伸展”和“集团屈曲”活动。加之拇指部分只能完成“侧方内收”动作,很难执行如“对指”、“柱状抓握”等日常生活相关的功能活动,所以气动康复手套仅能作为康复训练工具,辅助腕手功能障碍者进行手部的被动运动、维持手指关节活动度、降低手部痉挛,而不能辅助实际日常生活动作。
技术实现思路
1、本申请的实施例提供一种能够进行腕手部姿势控制的气动康复手套,能够完成“柱状抓握”和“球状抓握”等功能动作,实现腕手功能障碍者在现实生活场景中的日常生活应用。
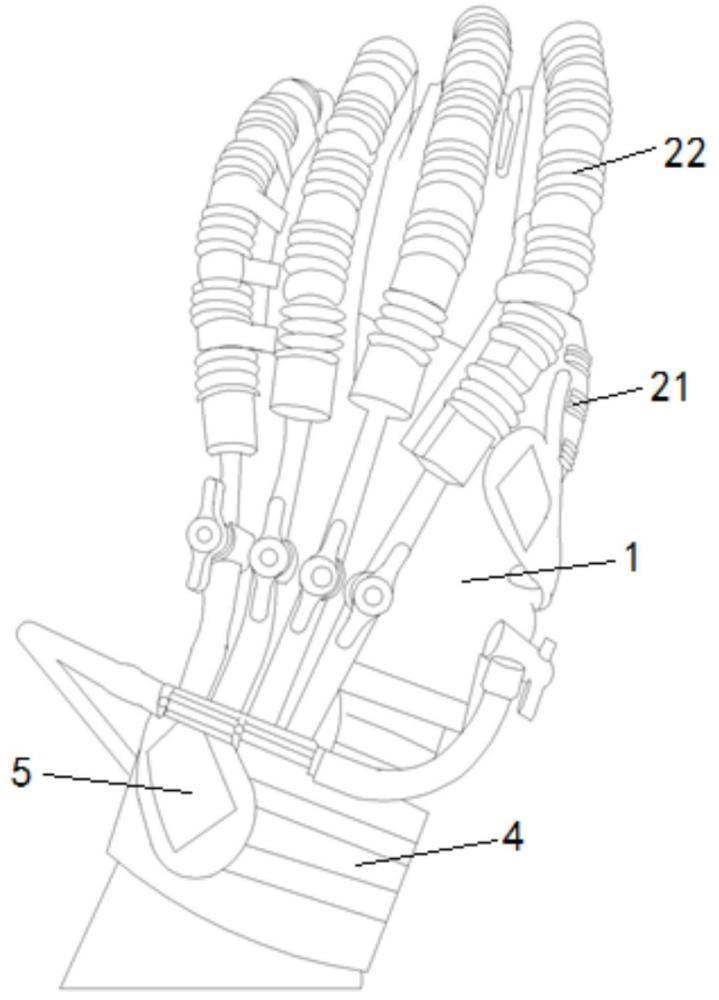
2、为达到上述目的,本申请的实施例提供了一种能够进行腕手部姿势控制的气动康复手套,包括弹性手套、波纹管和腕手固定件;所述波纹管设置在所述弹性手套的手背处且与气泵连通;所述腕手固定件的至少一部分位于所述弹性手套内;所述腕手固定件包括前臂部分、手掌部分和拇指部分;所述前臂部分和手掌部分的背伸夹角为20°~25°,尺偏夹角小于10°,拇指部分的掌侧外展角度为60°~90°;所述前臂部分通过绑带绑缚在患者的前臂上。
3、进一步地,所述拇指部分与所述手掌部分之间通过指璞部分连接;所述指璞部分与患者的拇指与食指之间的指璞相贴合。
4、进一步地,所述腕手固定件采用轻质板材加工而成。
5、进一步地,所述腕手固定件上设有透气孔。
6、进一步地,所述波纹管包括拇指波纹管和四个手指波纹管;所述拇指波纹管通过波纹管固定件固定于掌侧外展位。
7、进一步地,所述波纹管固定件包括固定带;所述固定带的第一端可拆卸地连接在所述绑带的上表面上,所述固定带的第二端从下部绕过患者的手腕后可拆卸地连接在所述弹性手套的拇指与食指之间的指璞处。
8、进一步地,所述波纹管固定件为两个。
9、进一步地,还包括控制单元和表面肌电检测装置;所述控制单元与表面肌电检测装置和气泵均通信连接;所述控制单元被配置为:接收所述表面肌电检测装置的伸展肌测量值或屈肌测量值;将所述伸展肌测量值与第一预设值进行比较,或将所述屈肌测量值与第二预设值进行比较;当所述伸展肌测量值大于第一预设值时,控制所述气泵给所述波纹管充气;当所述屈肌测量值大于第二预设值时,控制所述波纹管排气。
10、本申请相比现有技术具有以下有益效果:
11、本申请实施例能够进行腕手部姿势控制的气动康复手套,通过腕手姿势控制器和波纹管固定件的共同作用,将拇指充分掌侧外展和四指对掌,腕部背伸固定于一定角度,令手部形成“功能位”,从而在气动康复手套的带动下,完成“对掌”、“柱状抓握”、“球状抓握”等功能动作,进而实现“抓放水杯”等日常生活动作,实现腕手功能障碍者在现实生活场景中的日常生活应用。
技术特征:
1.一种能够进行腕手部姿势控制的气动康复手套,其特征在于,包括弹性手套、波纹管和腕手固定件;所述波纹管设置在所述弹性手套的手背处且与气泵连通;所述腕手固定件的至少一部分位于所述弹性手套内;所述腕手固定件包括前臂部分、手掌部分和拇指部分;所述前臂部分和手掌部分的背伸夹角为20°~25°,尺偏夹角小于10°,拇指部分的掌侧外展角度为60°~90°;所述前臂部分通过绑带绑缚在患者的前臂上。
2.根据权利要求1所述的能够进行腕手部姿势控制的气动康复手套,其特征在于,所述拇指部分与所述手掌部分之间通过指璞部分连接;所述指璞部分与患者的拇指与食指之间的指璞相贴合。
3.根据权利要求2所述的能够进行腕手部姿势控制的气动康复手套,其特征在于,所述腕手固定件采用轻质板材加工而成。
4.根据权利要求3所述的能够进行腕手部姿势控制的气动康复手套,其特征在于,所述腕手固定件上设有透气孔。
5.根据权利要求4所述的能够进行腕手部姿势控制的气动康复手套,其特征在于,所述波纹管包括拇指波纹管和四个手指波纹管;所述拇指波纹管通过波纹管固定件固定于掌侧外展位。
6.根据权利要求5所述的能够进行腕手部姿势控制的气动康复手套,其特征在于,所述波纹管固定件包括固定带;所述固定带的第一端可拆卸地连接在所述绑带的上表面上,所述固定带的第二端从下部绕过患者的手腕后可拆卸地连接在所述弹性手套的拇指与食指之间的指璞处。
7.根据权利要求6所述的能够进行腕手部姿势控制的气动康复手套,其特征在于,所述波纹管固定件为两个。
8.根据权利要求7所述的能够进行腕手部姿势控制的气动康复手套,其特征在于,还包括控制单元和表面肌电检测装置;所述控制单元与表面肌电检测装置和气泵均通信连接;所述控制单元被配置为:
技术总结
本申请公开了一种能够进行腕手部姿势控制的气动康复手套,涉及医疗器械技术领域。能够完成“柱状抓握”和“球状抓握”等功能动作,实现腕手功能障碍者在现实生活场景中的日常生活应用。该气动康复手套包括弹性手套、波纹管和腕手固定件;波纹管设置在弹性手套的手背处且与气泵连通;腕手固定件的至少一部分位于弹性手套内;腕手固定件包括前臂部分、手掌部分和拇指部分;前臂部分和手掌部分的背伸夹角为20°~25°,尺偏夹角小于10°,拇指部分的掌侧外展角度为60°~90°;前臂部分通过绑带绑缚在患者的前臂上。本申请用于提升气动康复手套的性能。
技术研发人员:刘霖,孙晨曦,朱琳
受保护的技术使用者:首都医科大学宣武医院
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!