本申请涉及医疗器械,特别涉及一种控制手柄力矩获取方法及装置、电子设备、计算机可读存储介质。
背景技术:
1、随着科技和社会的发展,医疗技术也在向着自动化方向发展,各个样式的手术机器人逐渐出现在大众视线中。目前大部分的手术机器人采用的是主从控制的模式,通过主手控制器(主手)的运动来同步驱动器械末端(从手)运动,从而提升手术机器人的灵活便捷性。
2、现有的手术机器人普遍缺乏感知能力,医生在使用手术机器人进行手术时,主手控制器无法感知到手术器械末端与人体内部交互而产生的作用力,只能凭借视觉推测,影响手术效率以及手术安全性。
3、部分手术机器人的器械末端通过力传感器来感知手术器械与人体内部之间的作用力。手术机器人在手术时,如果主手控制器不具备夹持力的反馈功能,医生无法良好的感知到器械末端夹持的力度,主手控制器就无法给医生提供良好的反馈,影响手术的效率。
技术实现思路
1、本申请实施例的目的在于提供一种控制手柄力矩获取方法,控制手柄与器械末端可实现同步开合运动,通过在器械末端设置传感元件采集获取手术器械末端与人体内部交互产生的作用力,从而将该作用力反馈至控制手柄端,为操作者提供良好的力反馈,进一步提供手术效率。
2、第一方面,本申请提供了一种控制手柄力矩获取方法,所述方法应用于手术机器人,所述手术机器人通过控制手柄同步驱动器械末端运动;所述方法包括:
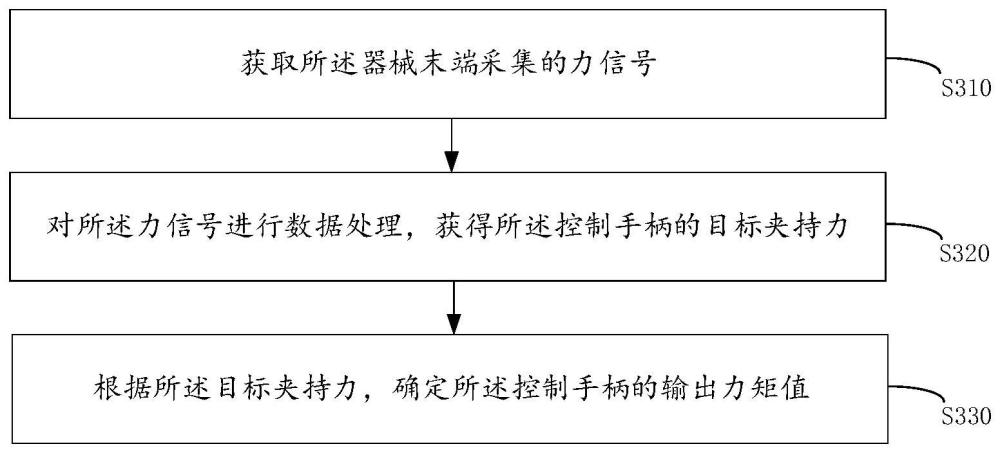
3、获取所述器械末端采集的力信号;
4、对所述力信号进行数据处理,获得所述控制手柄的目标夹持力;
5、根据所述目标夹持力,确定所述控制手柄的输出力矩值。
6、于一实施例中,所述器械末端上设有传感元件,所述获取所述器械末端采集的力信号,包括:
7、获取所述器械末端与手术对象交互产生的作用力;
8、通过所述传感元件将所述作用力转换为所述力信号。
9、于一实施例中,所述对所述力信号进行数据处理,包括:
10、对采集的原始力信号进行滤波处理,获得经过处理后的所述力信号。
11、于一实施例中,所述对所述力信号进行数据处理,获得所述控制手柄的目标夹持力,还包括:
12、对经过滤波处理后的所述力信号进行放大处理,得到经过处理后的目标力信号;
13、根据所述目标力信号,获得所述控制手柄的目标夹持力。
14、于一实施例中,所述控制手柄设于控制手柄的底座上;所述根据所述目标力信号,获得所述控制手柄的目标夹持力,包括:
15、获取所述控制手柄的底座与所述控制手柄之间的空间位姿转换关系;
16、基于所述空间位姿转换关系,将所述目标力信号转换为所述控制手柄的目标夹持力。
17、于一实施例中,所述控制手柄上设有弹性连接件;所述根据所述目标夹持力,确定所述控制手柄的输出力矩值,包括:
18、获取所述弹性连接件的弹性合力;
19、基于所述弹性合力与所述目标夹持力之间的预设计算公式,确定所述控制手柄的输出力矩值。
20、于一实施例中,所述基于所述弹性合力与所述目标夹持力之间的预设计算公式,确定所述控制手柄的输出力矩值,包括:
21、根据所述预设计算公式,计算得到所述弹性合力沿所述弹性连接件方向的分力;
22、根据所述分力,确定所述控制手柄的输出力矩值。
23、第二方面,本申请提供一种控制手柄力矩获取装置,包括:
24、采集模块,用于获取所述器械末端采集的力信号;
25、处理模块,用于对所述力信号进行数据处理,获得所述控制手柄的目标夹持力;
26、确定模块,用于根据所述目标夹持力,确定所述控制手柄的输出力矩值。
27、第三方面,本申请还提供了一种电子设备,所述电子设备包括:
28、处理器;
29、用于存储处理器可执行指令的存储器;
30、其中,所述处理器被配置为执行本申请实施例第一方面任意一项所述的控制手柄力矩获取方法。
31、第四方面,本申请还提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器运行时,用以执行本申请实施例第一方面任意一项所述的控制手柄力矩获取方法。
32、采用本申请控制手柄力矩获取方法,控制手柄与器械末端可实现同步开合运动,通过在器械末端设置传感元件采集获取手术器械末端与人体内部交互产生的作用力,从而将该作用力反馈至控制手柄端,为操作者提供良好的力反馈,进一步提供手术效率。
技术特征:1.一种控制手柄力矩获取方法,所述方法应用于手术机器人,所述手术机器人通过控制手柄同步驱动器械末端运动;其特征在于,所述方法包括:
2.根据权利要求1所述的控制手柄力矩获取方法,其特征在于,所述器械末端上设有传感元件,所述获取所述器械末端采集的力信号,包括:
3.根据权利要求1所述的控制手柄力矩获取方法,其特征在于,所述对所述力信号进行数据处理,包括:
4.根据权利要求3所述的控制手柄力矩获取方法,其特征在于,所述对所述力信号进行数据处理,获得所述控制手柄的目标夹持力,还包括:
5.根据权利要求4所述的控制手柄力矩获取方法,其特征在于,所述控制手柄设于控制手柄的底座上;所述根据所述目标力信号,获得所述控制手柄的目标夹持力,包括:
6.根据权利要求1所述的控制手柄力矩获取方法,其特征在于,所述控制手柄上设有弹性连接件;所述根据所述目标夹持力,确定所述控制手柄的输出力矩值,包括:
7.根据权利要求6所述的控制手柄力矩获取方法,其特征在于,所述基于所述弹性合力与所述目标夹持力之间的预设计算公式,确定所述控制手柄的输出力矩值,包括:
8.一种控制手柄力矩获取装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述存储介质存储有计算机程序,所述计算机程序被处理器运行时,用以执行权利要求1-7任意一项所述的控制手柄力矩获取方法。
技术总结本申请提供一种控制手柄力矩获取方法及装置、电子设备、存储介质,所述方法应用于手术机器人,手术机器人通过控制手柄同步驱动器械末端运动;所述方法包括:获取器械末端采集的力信号;对力信号进行数据处理,获得控制手柄的目标夹持力;根据目标夹持力,确定控制手柄的输出力矩值。本申请中,控制手柄与器械末端可实现同步开合运动,通过在器械末端设置传感元件采集获取手术器械末端与人体内部交互产生的作用力,从而将该作用力反馈至控制手柄端,为操作者提供良好的力反馈,进一步提供手术效率。
技术研发人员:王悦,郝思博,陈新博,崔迪,张博毅,苏豪爽,冯帅旗,曹涌
受保护的技术使用者:杭州迪视医疗生物科技有限公司
技术研发日:技术公布日:2024/6/20