一种脊柱微创手术机器人的制作方法
本发明涉及医疗器械的,具体为一种脊柱微创手术机器人。
背景技术:
1、手术机器人操纵骨锯的动作可以分为进给和锯切两个动作,所谓进给就是将手术器械移动到手术部位的动作,通常动作幅度较大、移动距离较远,动作慢、频率低;所谓锯切就是根据骨锯的种类执行振动或者旋转的动作,通常动作幅度小、移动距离短,但速度快、频率高。环锯是用作环形锯开的一种外科手术器械,常用作胸腰椎前路减压、腰椎间盘突出等椎间孔镜手术中。例如,在治疗椎间盘突出症时,在椎间盘脱出的情况下,为了使工作通道安全到达脊柱腔,需要使用环锯切除小关节远端增生的骨质和部分上关节突起的部分以扩大椎间孔,使脊柱内窥镜的工作通道到达脊柱腔,使用手术器械摘除疝出的髓核组织,达到治疗椎间盘突出症的目的。手术中使用环锯的时候只能顺时针转,转完整的圆才会实现孔镜下的关节突成形,并且切割的力量和旋转的速度完全依靠临床医生的手感和个人经验,手术风险比较大。现在已有临床医生在改进操作方法后通过反复半圆来实现椎间盘突出的安全切割。例如中国专利2020203057017公开了《脊柱内镜正反向环锯》,公开号是cn211911714u,这种正反向环锯包括底部设置有环形锯齿的管状的管体,该管体上部自下而上依次滑动连接有限位挡板和限位管,限位管中部外圆周转动连接有可水平转动的刻度板,刻度板底部后侧底部固定连接有延伸柱,延伸柱底部滑动连接有可上下移动的滑杆,滑杆前端固定连接有环形的卡环,卡环内侧设置有可径向移动的卡片,卡环和所述管体同轴;所述管体顶部可拆卸的连接有手柄。这样就解决了目前腰椎间盘手术中环锯在使用中存在的切整圆危险系数较高、往复半圆切割效率低的问题。但是,该正反向环锯仍需要手动操作,环锯的进给和锯切动作都由医生手动控制并执行,无法实现精确的进给定位以及准确的扭矩控制,手术中,针对不同的手术个体、不同的手术部位,需要环锯切割的骨质密度存在较大的差异,不同的骨密度对应的切割速度和扭矩也存在一定的差异。因此,现在技术中的环锯以及上述正反向环锯在降低手术风险方面仍有待进一步提高。
技术实现思路
1、针对上述技术问题,本发明的目的在于提供一种自动化程度高、手术安全性强并准确控制进给定位的脊柱微创手术机器人。
2、为实现上述目的,本发明采用如下技术方案:
3、本发明所述一种脊柱微创手术机器人包括多轴机械臂和安装在多轴机械臂上的骨锯执行机构、安装在所述骨锯执行机构上的骨锯,所述骨锯执行机构包括用于安装骨锯并驱动骨锯实现锯切动作的骨锯驱动总成、用于安装骨锯驱动总成并驱动骨锯驱动总成线性移动的线性驱动机构;所述线性驱动机构通过安装底板固定安装在多轴机械臂的末端;所述骨锯为内腔中设置有骨组织厚度检测装置的环锯,所述骨组织厚度检测装置与控制骨锯动作的控制电路电连接。
4、通过本方案,该手术机器人能够多角度精确定位骨锯驱动总成的移动位置,从而实现骨锯进给动作的精密控制,提高手术的自动化程度并提高安全性。
5、优选地,所述骨组织厚度检测装置是拾音器,所述拾音器连接在拾音控制模块的信号采集端,所述拾音控制模块包括用于接收音频信号的信号采集与转换单元、用于处理音频信号的滤波去噪单元、控制与信号处理单元,所述控制与信号处理单元与控制电路电连接。
6、通过本方案,该机器人可以根据骨锯工作时产生的噪音判断被切割骨组织的厚度,并据此调整骨锯的工作参数,提高手术的安全性。
7、优选地,所述骨组织厚度检测装置是超声换能器,所述超声换能器连接在超声控制模块的信号收发端,所述超声控制模块包括用于向超声换能器发送超声激励信号的超声波脉冲发生器、用于接收超声换能器传送的回波信号并对回波信号进行滤波去噪处理的回波集采与转换电路、控制与信号处理器,所述控制与信号处理器与控制电路电连接。
8、通过本方案,该机器人可以通过超声波探测被切割骨组织的厚度,并据此调整骨锯的工作参数,提高手术的安全性。
9、优选地,所述骨锯驱动总成通过滑板滑动安装在线性驱动机构上;所述线性驱动机构包括安装底板、固定连接在安装底板上的滑轨、两端通过轴座可旋转地连接在安装底板上的丝杠、滑动连接在滑轨上并与丝杠螺纹连接的滑块;所述滑板固定连接在滑块上;所述丝杠的一端与第一驱动电机传动连接;所述滑轨的一侧设置有用于检测滑块移动位置的位移检测装置装置,所述位移检测装置的信号采集端与控制电路电连接,所述控制电路根据位移检测装置的信号控制第一驱动电机的动作。
10、通过本方案,可以精确定位骨锯驱动总成的移动位置,从而实现骨锯进给动作的精密控制,提高自动化程度。
11、优选地,所述骨锯驱动总成包括用于安装环锯的骨锯接头、与骨锯接头传动连接的第二驱动电机,所述第二驱动电机的输出端通过偏摆机构连接到扭矩传感器的扭矩输入端,所述扭矩传感器的扭矩输入端固定连接骨锯接头,所述扭矩传感器的信号采集端与控制电路电连接,所述控制电路根据扭矩传感器的信号控制第二驱动电机的转速;所述偏摆机构包括安装在第二驱动电机转轴上的偏心轮、固定连接在扭矩传感器扭矩输入端的摆杆,所述摆杆上设置有匹配所述偏心轮的长孔,所述偏心轮通过轴承安装在长孔中。
12、通过本方案,采用电机驱动骨锯代替手工操作,自动化程度高并且能够根据扭矩传感器的信号控制第二驱动电机的转速,手术安全性强;以摆动切割代替单向旋转切割,解决了目前腰椎间盘手术环锯使用中存在的切整圆危险系数较高的问题。
13、优选地,所述安装底板固定连接设置有u形架,所述u形架上安装有用于检测手术部位的标记物感应器;所述标记物感应器是带有手术通道夹持装置的光学传感器;所述手术通道夹持装置包括安装在双向丝杠上的左夹持爪和右夹持爪,所述双向丝杠与第三电机传动连接。
14、通过本方案,可以实现手术部位的自动追踪定位。
15、与现有技术相比,本发明的有益效果是:该机器人自动化程度高、手术安全性强并能准确识别手术部位、控制进给定位和锯切动作。使用环锯时,能够实时检测本切割骨组织的厚度并据此调整环锯的工作参数,提高手术的安全性;环锯以摆动切割代替单向旋转切割,解决了目前腰椎间盘手术环锯使用中存在的切整圆危险系数较高的问题。
技术特征:
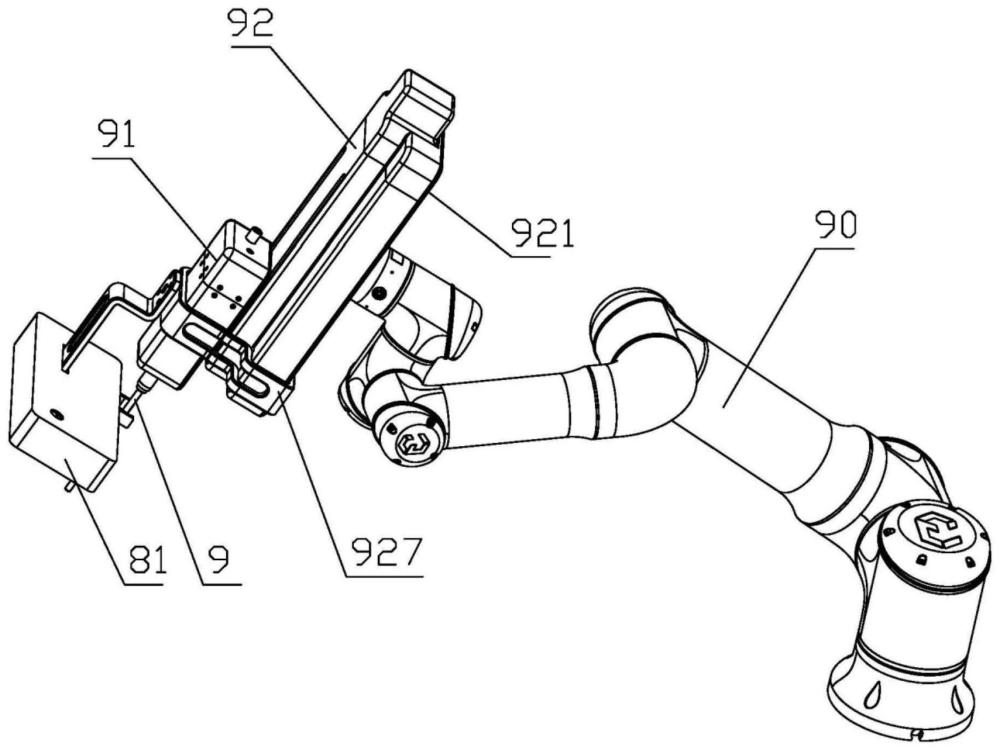
1.一种脊柱微创手术机器人,包括多轴机械臂(90)和安装在多轴机械臂(90)上的骨锯执行机构、安装在所述骨锯执行机构上的骨锯(9),其特征在于:所述骨锯执行机构包括用于安装骨锯(9)并驱动骨锯(9)实现锯切动作的骨锯驱动总成(91)、用于安装骨锯驱动总成(91)并驱动骨锯驱动总成(91)线性移动的线性驱动机构(92);所述线性驱动机构(92)通过安装底板(921)固定安装在多轴机械臂(90)的末端;所述骨锯(9)为内腔中设置有骨组织厚度检测装置的环锯,所述骨组织厚度检测装置与控制骨锯(9)动作的控制电路(pcb)电连接。
2.根据权利要求1所述一种脊柱微创手术机器人,其特征在于:所述骨组织厚度检测装置是拾音器(101),所述拾音器(101)连接在拾音控制模块(103)的信号采集端,所述拾音控制模块(103)包括用于接收音频信号的信号采集与转换单元(131)、用于处理音频信号的滤波去噪单元(132)、控制与信号处理单元(133),所述控制与信号处理单元(133)与控制电路(pcb)电连接。
3.根据权利要求1所述一种脊柱微创手术机器人,其特征在于:所述骨组织厚度检测装置是超声换能器(201),所述超声换能器(201)连接在超声控制模块(203)的信号收发端,所述超声控制模块(203)包括用于向超声换能器(201)发送超声激励信号的超声波脉冲发生器(231)、用于接收超声换能器(2011)传送的回波信号并对回波信号进行滤波去噪处理的回波集采与转换电路(232)、控制与信号处理器(233),所述控制与信号处理器(233)与控制电路(pcb)电连接。
4.根据权利要求1或2或3所述一种脊柱微创手术机器人,其特征在于:所述骨锯驱动总成(91)通过滑板(8)滑动安装在线性驱动机构(92)上;所述线性驱动机构(92)包括安装底板(921)、固定连接在安装底板(921)上的滑轨(923)、两端通过轴座可旋转地连接在安装底板(921)上的丝杠(922)、滑动连接在滑轨(923)上并与丝杠(922)螺纹连接的滑块(924);所述滑板(8)固定连接在滑块(924)上;所述丝杠(922)的一端与第一驱动电机(925)传动连接;所述滑轨(923)的一侧设置有用于检测滑块(924)移动位置的位移检测装置装置(926),所述位移检测装置(926)的信号采集端与控制电路(pcb)电连接,所述控制电路(pcb)根据位移检测装置(926)的信号控制第一驱动电机(925)的动作。
5.根据权利要求4所述一种脊柱微创手术机器人,其特征在于:所述骨锯驱动总成(91)包括用于安装骨锯(9)的骨锯接头(1)、与骨锯接头(1)传动连接的第二驱动电机(2),所述第二驱动电机(2)的输出端通过偏摆机构连接到扭矩传感器(3)的扭矩输入端,所述扭矩传感器(3)的扭矩输入端固定连接骨锯接头(1),所述扭矩传感器(3)的信号采集端与控制电路(pcb)电连接,所述控制电路(pcb)根据扭矩传感器(3)的信号控制第二驱动电机(2)的转速;所述偏摆机构包括安装在第二驱动电机(2)转轴上的偏心轮(4)、固定连接在扭矩传感器(3)扭矩输入端的摆杆(5),所述摆杆(5)上设置有匹配所述偏心轮(4)的长孔(6),所述偏心轮(4)通过轴承安装在长孔(6)中。
6.根据权利要求1或2或3所述一种脊柱微创手术机器人,其特征在于,所述安装底板(921)固定连接设置有u形架(927),所述u形架(927)上安装有用于检测手术部位的标记物感应器(81);所述标记物感应器(81)是带有手术通道夹持装置(82)的光学传感器;所述手术通道夹持装置(82)包括安装在双向丝杠(824)上的左夹持爪和右夹持爪,所述双向丝杠(824)与第三电机传动连接。
技术总结
本发明涉及医疗器械的技术领域,具体为一种脊柱微创手术机器人。包括多轴机械臂和安装在多轴机械臂上的骨锯执行机构、安装在所述骨锯执行机构上的骨锯;所述骨锯为内腔中设置有骨组织厚度检测装置的环锯,骨组织厚度检测装置与控制骨锯运转的控制电路电连接。该机器人采用电能够实时监测骨组织的厚度并将监测数据用于调节骨锯的工作参数,自动化程度高并且能够根据传感器的信号精确控制驱动电机的动作,手术安全性强。
技术研发人员:游勤光,马学晓,胡爱民,郭泰,白剑锋
受保护的技术使用者:懋煜(青岛)医疗科技有限公司
技术研发日:
技术公布日:2024/7/15
- 还没有人留言评论。精彩留言会获得点赞!