一种骨科手术定位装置
本发明涉及一种骨科手术定位装置。
背景技术:
1、在骨科手术中,很多手术需要准确的钻孔和置入螺钉,传统的定位方式,一种是徒手钻孔,另一种是在c形臂x线透视辅助下钻孔。前者定位准确度差,且不同手术者差别较大;后者需要反复透视,费时费事,且医患有较长时间暴露在x射线伤害中。目前已有智能手术导航系统或手术机器人,可显著提高手术的准确度,但其系统费用较昂贵,难以普及,另外其在使用中要较多的辅助工具和较复杂的安装和注册,术中如有参考坐标位移,则需要重复注册,故使用过程繁琐不便,且亦离不开x线透视确认,影响了系统的易用性。
2、为此,我们设计了一种可以实现辅助定位,定位准确的骨科手术定位装置。
技术实现思路
1、本发明要解决的技术问题是提供一种可以实现辅助定位,定位准确的骨科手术定位装置。
2、为解决上述问题,本发明采用如下技术方案:
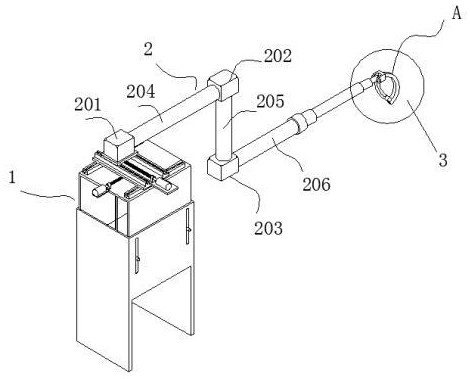
3、一种骨科手术定位装置,包括三维移动模块,以及通过所述三维移动模块支持的圆管连接臂,以及通过所述圆管连接臂安装的二向弧形移动模块,通过所述二向弧形移动模块安装有定位导向套管。
4、优选地,所述三维移动模块包括基座,以及竖向设置于所述基座内的电动推杆,在所述基座内设置有滑台,所述滑台沿着所述基座的竖向滑移,所述电动推杆的伸缩端与所述滑台固定,在所述滑台的顶部横向设置有第一滑轨,通过所述第一滑轨配合有第一滑板,所述滑台的顶部安装有第一步进电机,在所述第一步进电机的输出端固定有第一丝杠,所述第一滑板的底部设置有配合所述第一丝杠的第一螺母副,在所述第一滑板的顶部纵向设置有第二滑轨,通过所述第一滑轨滑动安装有第二滑板,在所述第一滑板的侧面安装有第二步进电机,所述第二步进电机的输出端安装有第二丝杠,所述第二滑板的底部设置有配合所述第二丝杠的第二螺母副;所述圆管连接臂通过所述第二滑板安装,在所述基座内竖向安装有检测所述滑台竖向滑移量的第三磁栅尺,在所述在所述滑台的顶部安装有平行所述第一丝杠的第四磁栅尺,通过第四磁栅尺检测第一滑板的位移量,在所述第一滑板的顶部安装有检测第二滑板位移量的第五磁栅尺。
5、优选地,所述圆管连接臂包括第一舵机、第二舵机和第三舵机,所述第一舵机、第二舵机和第三舵机均装有磁流体材料的电磁锁止结构,在所述第一舵机和所述第二舵机之间连接有第一圆管,在所述第二舵机和第三舵机之间连接有第二圆管,所述第二圆管竖向设置,所述第一圆管水平设置,所述第一舵机固定安装于所述第二滑板的顶部,所述第三舵机的旋转端安装有伸缩杆,所述二向弧形移动模块安装于所述伸缩杆的末端。
6、优选地,所述二向弧形移动模块包括连接所述伸缩杆的连接轴,以及通过所述连接轴安装的连接座,所述连接座与所述连接轴之间配合有螺栓,在所述连接座的端部设置有第一弧形杆,所述第一弧形杆的侧面设置有滑槽,通过所述滑槽滑动配合有导向套杆,所述导向套杆位于所述滑槽外部的那一端设置有第二弧形杆,所述第二弧形杆的侧面设置有第一滑槽,所述定位导向套管滑动配合于所述第一滑槽内,在所述滑槽内设置有第一磁栅尺,在所述第一滑槽内安装有第二磁栅尺,通过第一磁栅尺和第二磁栅尺检测所述导向套杆和所述定位导向套管的位移量,所述第一弧形杆和所述第二弧形杆处于同一球形面上;第一磁栅尺、第二磁栅尺、第三磁栅尺、第四磁栅尺和第五磁栅尺的监测数据通过数据线传输到电脑操作软件中,同时操作软件接收来自c-臂或g-臂x线透视机的图像,通过操作软件可显示定位导向套管的在图像中的坐标,并精确计算定位导向套管需要调整的数据,从而通过步进电机进行调整定位导向套管的位置。
7、优选地,所述二向弧形移动模块为碳纤维材质。
8、优选地,所述三维移动模块和所述圆管连接臂采用钛镁合金材质制作。
9、本装置有专用的操作系统,操作系统收集来自磁栅尺的信息、和透视图像,既可自动计算靶点和导向套管的相对位置,又可驱动步进电机进行相应的多向调节导向套管。
10、本发明的有益效果是:
11、优点一,本技术方案中,通过三维移动模块可以实现三维方向的准确定位调节,满足病人不同手术部位操作点的准确定位需要。从而可实现在手术不显露或显露补充的微创手术中准确操作的需要。
12、优点二,通过圆管连接臂的位置调节,可以实现连接杆一端安装的二向弧形移动模块更大范围的移动,从而使二向弧形移动模块能够适应不同体型病人、不同身体部位的位置安放。
13、优点三,通过二向弧形移动模块可以实现定位导向套管在靶点多角度的方向调节。从而实现在手术不显露或显露补充的微创手术中准确操作的需要。
14、优点四,三维移动模块和二向弧形移动模块的移动组合可以达到手术空间任一点、任一方向的精准定位定向,从而实现手术的精准、微创操作。而且因为可一次准确调节,避免了手术中反复透视造成的放射损害、缩短了手术时间。
15、优点五,连接臂选用钛镁合金管状材料使系统重量轻、机械强度高。
16、优点六,连接臂内选用磁流体材料用作锁止结构,可以减少单纯固体材料锁止时产生的小位移影响,从而减少锁止动作时对结构造成的位置偏差。
17、优点七,二向移动模块选用碳纤维材料,除了重量轻,还不阻挡x射线,从而不影响手术部位的x线透视显影。
18、优点八,本发明装置是机械定位和自动测量相结合的系统,较目前的价格昂贵、结构复杂的手术机器人系统结构简单、操作简单、造价低,便于在一般医院中推广使用
技术特征:
1.一种骨科手术定位装置,其特征在于:包括三维移动模块(1),以及通过所述三维移动模块(1)支持的圆管连接臂(2),以及通过所述圆管连接臂(2)安装的二向弧形移动模块(3),通过所述二向弧形移动模块(3)安装有定位导向套管(4)。
2.根据权利要求1所述的骨科手术定位装置,其特征在于:所述三维移动模块(1)包括基座(101),以及竖向设置于所述基座(101)内的电动推杆(102),在所述基座(101)内设置有滑台(103),所述滑台(103)沿着所述基座(101的竖向滑移,所述电动推杆(102)的伸缩端与所述滑台(103)固定,在所述滑台(103)的顶部横向设置有第一滑轨(104),通过所述第一滑轨(104)配合有第一滑板(105),所述滑台(103)的顶部安装有第一步进电机(106),在所述第一步进电机(106)的输出端固定有第一丝杠(107),所述第一滑板(105)的底部设置有配合所述第一丝杠(107)的第一螺母副,在所述第一滑板(105)的顶部纵向设置有第二滑轨(108),通过所述第一滑轨(108)滑动安装有第二滑板(109),在所述第一滑板(105)的侧面安装有第二步进电机(110),所述第二步进电机(110)的输出端安装有第二丝杠(111),所述第二滑板(109)的底部设置有配合所述第二丝杠(111)的第二螺母副;所述圆管连接臂(2)通过所述第二滑板(109)安装,在所述基座(101)内竖向安装有检测所述滑台(103)竖向滑移量的第三磁栅尺(1991),在所述在所述滑台(103)的顶部安装有平行所述第一丝杠(107)的第四磁栅尺(1992),通过第四磁栅尺(1992)检测第一滑板(105)的位移量,在所述第一滑板(105)的顶部安装有检测第二滑板(109)位移量的第五磁栅尺(1993)。
3.根据权利要求2所述的骨科手术定位装置,其特征在于:所述圆管连接臂(2)包括第一舵机(201)、第二舵机(202)和第三舵机(203),所述第一舵机(201)、第二舵机(202)和第三舵机(203)均装有磁流体材料的电磁锁止结构,在所述第一舵机(201)和所述第二舵机(202)之间连接有第一圆管(204),在所述第二舵机(202)和第三舵机(203)之间连接有第二圆管(205),所述第二圆管(205)竖向设置,所述第一圆管(204)水平设置,所述第一舵机(201)固定安装于所述第二滑板(109)的顶部,所述第三舵机(203)的旋转端安装有伸缩杆(206),所述二向弧形移动模块(3)安装于所述伸缩杆(206)的末端。
4.根据权利要求3所述的骨科手术定位装置,其特征在于:所述二向弧形移动模块(3)包括连接所述伸缩杆(206)的连接轴(301),以及通过所述连接轴(301)安装的连接座(302),所述连接座(302)与所述连接轴(301)之间配合有螺栓(303),在所述连接座(302)的端部设置有第一弧形杆(304),所述第一弧形杆(304)的侧面设置有滑槽(305),通过所述滑槽(305)滑动配合有导向套杆(306),所述导向套杆(306)位于所述滑槽(305)外部的那一端设置有第二弧形杆(307),所述第二弧形杆(307)的侧面设置有第一滑槽(308),所述定位导向套管(4)滑动配合于所述第一滑槽(308)内,在所述滑槽(305)内设置有第一磁栅尺,在所述第一滑槽(308)内安装有第二磁栅尺,通过第一磁栅尺和第二磁栅尺检测所述导向套杆(306)和所述定位导向套管(4)的位移量,所述第一弧形杆(304)和所述第二弧形杆(307)处于同一球形面上;第一磁栅尺、第二磁栅尺、第三磁栅尺、第四磁栅尺和第五磁栅尺的监测数据通过数据线传输到电脑操作软件中,同时操作软件接收来自c-臂或g-臂x线透视机的图像,通过操作软件可显示定位导向套管的在图像中的坐标,并精确计算定位导向套管需要调整的数据,从而通过步进电机进行调整定位导向套管的位置。
5.根据权利要求1所述的骨科手术定位装置,其特征在于:所述二向弧形移动模块(3)为碳纤维材质。
6.根据权利要求1所述的骨科手术定位装置,其特征在于:所述三维移动模块(1)和所述圆管连接臂(2)采用钛镁合金材质制作。
技术总结
本发明公开了一种骨科手术定位装置,包括三维移动模块,以及通过所述三维移动模块支持的圆管连接臂,以及通过所述圆管连接臂安装的二向弧形移动模块,通过所述二向弧形移动模块安装有定位导向套管;本设备可以实现辅助定位,定位准确。
技术研发人员:栗威,陈磊,焦国胜,韩清銮
受保护的技术使用者:济宁医学院附属医院
技术研发日:
技术公布日:2024/6/18
- 还没有人留言评论。精彩留言会获得点赞!