一种全骨科平台手术机器人及其导航方法与流程
本发明属于医疗器械,涉及一种全骨科平台手术机器人及其导航方法。
背景技术:
1、现有骨科手术机器人主要针对特定类型的骨科手术设计,适用范围有限,且在手术精度、灵活性和智能化程度等方面尚存在提升空间。此外,不同骨科手术场景下的需求差异较大,单一功能的手术机器人难以适应复杂的骨科手术需求。
技术实现思路
1、本发明为了克服至少一个现有技术的不足,提供一种全骨科平台手术机器人及其导航方法。
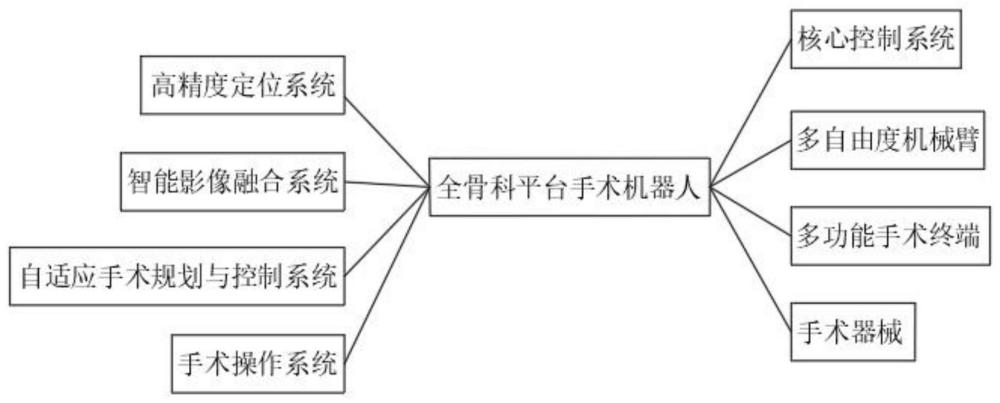
2、为了实现上述目的,本发明采用以下技术方案:一种全骨科平台手术机器人,包括
3、核心控制系统为嵌入式高性能微处理器,用于协调各部件间的工作流程,并支持多任务并发处理;
4、模块化系统,安装在手术机器人的末端;
5、高精度定位系统,用于实时追踪手术器械在空间的位置;
6、智能影像融合系统,用于将术前影像与手术现场的实时影像融合,基于融合后的影像数据,规划和确认手术路径;
7、自适应手术规划与控制系统,用于构建出患者的三维模型、规划手术路径以及根据实时捕捉和量化手术器械与骨骼接触时的接触力和扭矩变化,调节手术器械与骨骼接触时的接触力;
8、手术操作系统支持多元化交互,还包括用户界面,通过用户界面进行交互。
9、进一步的,所述模块化系统包括多自由度机械臂、多功能手术终端和手术器械,多自由度机械臂安装在手术机器人的末端,多功能手术终端与多自由度机械臂末端连接,手术器械与多功能手术终端可拆卸连接,多功能手术终端具备兼容多种手术器械的快速更换接口,可装配不同类型的手术器械。
10、进一步的,所述高精度定位系统包括光学跟踪系统和磁导航系统,光学跟踪系统内置于手术机器人,光学跟踪系统采用红外或激光光源,光学跟踪系统设有反光标记点,反光标记点设置在手术器械上,光学跟踪系统捕捉手术器械上的反光标记点。
11、进一步的,所述磁导航系统包括磁敏感元件,磁敏感元件设置在手术器械上,磁导航系统与外部磁场发生器及传感器结合,对手术器械在三维立体空间内的位置进行定位和追踪。
12、进一步的,所述自适应手术规划与控制系统包括
13、模型建立模块,内置深度学习算法,通过分析和学习术前患者数据,利用神经网络三维模型进行处理和学习构建出能够反映患者个体特性的三维模型;
14、路线调整模块,路线调整模块实时接收并处理手术现场的反馈数据,基于这些实时反馈,路线调整模块实时调整手术器械的路线;
15、力-扭矩传感器阵列,用于实时捕捉和量化手术器械与骨骼接触时的接触力和扭矩变化;
16、主动阻抗控制模块,内置主动阻抗算法,根据力-扭矩传感器阵列反馈的数据,调节手术器械与骨骼接触时的接触力。
17、一种全骨科平台手术机器人的导航方法,包括以下步骤:
18、步骤s1:医学影像数据导入模型建立模块,构建患者的三维模型;
19、步骤s2:智能影像融合系统创建虚拟手术环境,基于三维模型和虚拟手术环境,进行手术模拟;
20、步骤s3:术前手术机器人准备;
21、步骤s4:高精度定位系统实时采集手术器械在三维立体空间内的位置数据,位置数据转化为可视化信号输入用户界面,判断手术路线是否符合手术规划,若是,执行步骤s5,若否,用户界面显示报警,路线调整模块根据位置数据实时调整手术器械的路线;
22、步骤s5:力-扭矩传感器阵列实时捕捉和量化手术器械与骨骼接触时的接触力和扭矩将输入阻抗控制模块和用户界面,阻抗控制模块判断接触力和扭矩是否超过预设阈值,若是,用户界面显示报警,核心控制系统调整多自由度机械臂的驱动力矩,若否,执行步骤s6;
23、步骤s6:判断手术器械是否达到目标解剖位置,若是,执行步骤s7,若否,执行步骤s4;
24、步骤s7:手术机器人系统自动存储手术过程的所有关键数据,形成详细的数字化手术报告,并加密保存;
25、步骤s8:将数字化手术报告术与手术计划数据对比,定量评估手术精度,提取其中高于精度阈值的指标以及对应手术步骤,形成优化手术报告,并保存;
26、步骤s9:结束步骤。
27、进一步的,所述步骤s3包括以下步骤:
28、步骤s31:根据手术规划,将全骨科平台手术机器人放置在手术室内的预设位置,并与手术床、c型臂透视机设备进行物理和电子同步,选择与手术需求匹配的手术器械安装至多功能手术终端,并通过消毒封装确保无菌操作环境;
29、步骤s32:启动光学跟踪系统与磁导航系统,实时监测并校正手术器械的位置与姿态,通过高精度定位系统采集手术器械在空间位置的位置数据,路线调整模块根据位置数据调整手术器械的路线,验证手术器械在整个手术过程中与规划的路径是否一致;
30、步骤s33:启动手术操作系统,通过多元化交互下达指令,验证手术机器人根据指令执行精细化的操作动作。
31、综上所述,本发明的有益之处在于:
32、1)本发明的全骨科平台手术机器人凭借其模块化系统的优势、高精度定位系统的精确度、智能影像融合系统的应用、自适应手术规划与控制系统的智能化特色,以及手术操作系统带来的全流程优化,成功克服了传统骨科手术面临的一系列难题,显著提高了手术的安全性、精准度和效率。
33、2)本发明的全骨科平台手术机器人全面覆盖骨科手术领域,打破了单一手术机器人功能局限性的问题。
34、3)本发明模块化系统便于拓展与升级,满足不同骨科手术的个性化需求。
技术特征:
1.一种全骨科平台手术机器人,其特征在于:包括
2.根据权利要求1所述的一种全骨科平台手术机器人,其特征在于:所述模块化系统包括多自由度机械臂、多功能手术终端和手术器械,多自由度机械臂安装在手术机器人的末端,多功能手术终端与多自由度机械臂末端连接,手术器械与多功能手术终端可拆卸连接,多功能手术终端具备兼容多种手术器械的快速更换接口,可装配不同类型的手术器械。
3.根据权利要求1所述的一种全骨科平台手术机器人,其特征在于:所述高精度定位系统包括光学跟踪系统和磁导航系统,光学跟踪系统内置于手术机器人,光学跟踪系统采用红外或激光光源,光学跟踪系统设有反光标记点,反光标记点设置在手术器械上,光学跟踪系统捕捉手术器械上的反光标记点。
4.根据权利要求3所述的一种全骨科平台手术机器人,其特征在于:所述磁导航系统包括磁敏感元件,磁敏感元件设置在手术器械上,磁导航系统与外部磁场发生器及传感器结合,对手术器械在三维立体空间内的位置进行定位和追踪。
5.根据权利要求1所述的一种全骨科平台手术机器人,其特征在于:所述自适应手术规划与控制系统包括
6.一种全骨科平台手术机器人的导航方法,基于权利要求1-5任一项所述的手术机器人,其特征在于:包括以下步骤:
7.根据权利要求6所述的一种全骨科平台手术机器人的导航方法,其特征在于:所述步骤s3包括以下步骤:
技术总结
本发明公开了一种全骨科平台手术机器人及其导航方法,包括核心控制系统为嵌入式高性能微处理器,用于协调各部件间的工作流程,并支持多任务并发处理;模块化系统,安装在手术机器人的末端;高精度定位系统,用于实时追踪手术器械在空间的位置;智能影像融合系统,用于将术前影像与手术现场的实时影像融合,基于融合后的影像数据,规划和确认手术路径,本发明的全骨科平台手术机器人凭借其模块化系统的优势、高精度定位系统的精确度、智能影像融合系统的应用、自适应手术规划与控制系统的智能化特色,以及手术操作系统带来的全流程优化,成功克服了传统骨科手术面临的一系列难题,显著提高了手术的安全性、精准度和效率。
技术研发人员:徐子昂,卢明,林鹏,童睿,方华磊,王婧
受保护的技术使用者:杭州三坛医疗科技有限公司
技术研发日:
技术公布日:2024/8/20
- 还没有人留言评论。精彩留言会获得点赞!