一种六维床精度测试方法与流程
本发明涉及测试领域,尤其涉及一种六维床精度测试方法。
背景技术:
1、当前的伽玛刀是融立了立体定向技术和放射外科技术于一体,以治疗颅脑疾病和体部肿瘤为主的大型医疗设备,其治疗原理类似于放大镜的聚焦过程,将射线束通过交叉叠加使得病灶区获得高剂量,而病灶周围的正常组织接收的剂量确较低,从而降低放疗对正常组织的损伤。为提高放疗设备的治疗精准度,多数伽玛刀配备了专用的治疗床。
2、为了避免对患者重要组织器官的伤害,治疗床应具备六维运动,在具有沿x、y、z三个直线轴平移运动的基础上还应具备xt、yt、zt等三个绕直线轴的转动,这样就会实现射线聚焦病灶的同时绕开病灶部位的重要组织器官,从而有效减小和避免对患者的伤害,提高治疗效果。但当前对六维床的旋转精度的测量,大多采用双目相机、3d结构光相机进行测试,此类方法存在标定复杂,数据处理的算法复杂,且测试方法无法保证能够正确反应六维床的旋转精度。
3、因此,有必要提供一种新的测试装置,对六维床的精度进行测量及补偿修正,以提高六维床的精度,进而提升治疗效果。
技术实现思路
1、为解决背景技术中存在的上述技术问题,本发明提供一种六维床精度测试方法,利用一套专用测试装置,通过基于核物理胶片分析定位参考点偏差的方法对六维床旋转的运动精度进行验证,通过分析测试数据,得出六维床运动的运动精度。
2、本发明的技术解决方案是:本发明为一种六维床精度测试方法,其特殊之处在于:所述六维床精度测试方法包括以下步骤:
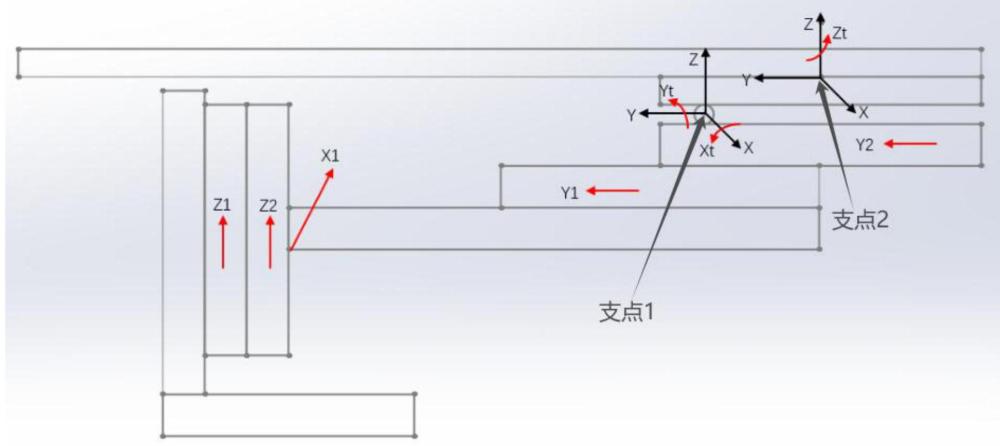
3、1)建立转动关节运动补偿的数学模型;首先建立坐标系,根据左手定则,以支点处1为原点作为坐标系1,以支点处2为原点作为坐标系2,具体包括以下步骤:
4、1.1)建立模型基础坐标系;
5、1.2)基于正向运动学算法,测试点绕回转轴转动角度θ、回转方向计算目标控制点位置;
6、1.3)绕某一轴回转时,根据球模球心的目标位置和相对初始位置计算偏移量,确定该轴方向的补偿量;
7、2)组装六维床精度测试装置,六维床精度测试装置包括测试底板和胶片安装组件,胶片安装组件设置在测试底板上,胶片安装组件包括u型支架、固定盒组件、连接轴、锁紧销钉和底座,u型支架上设置有多组安装孔,固定盒组件通过连接轴和安装孔与u型支架连接,u型支架设置在底座上,固定盒组件中包含固定盒、胶片盒和旋转轴,胶片盒设置在固定盒内,固定盒两端分别设置有旋转轴,固定盒通过旋转轴与连接轴连接;
8、3)将固定盒组件旋转一个角度;
9、4)运动六维床将六维床精度测试装置送至伽玛刀焦点;
10、5)运动六维床旋转轴将固定盒组件调整至与滚筒轴线面平行;
11、6)根据步骤1)的转动关节运动补偿的数学模型计算出的理论补偿量δx、δy、δz,按理论补偿量δx、δy、δz运动六维床;
12、7)伽玛刀出束打到胶片上;
13、8)取出胶片分析,利用扫描设备扫描胶片生成二维图像,输入至imagej软件获取胶片的外轮廓,并计算出圆心的像素坐标作为中心点;
14、9)与初始状态的中心点坐标值进行比较计算中心偏差值。
15、进一步的,步骤1.1)的具体步骤如下:
16、1.1.1)根据左手坐标系定则,以支点处1为原点作为坐标系1,定义为axis1,以支点处2为原点作为坐标系2,定义为axis2;
17、1.1.2)根据右手螺旋定则,绕axis1的x轴逆时针转动为正方向,同理绕y轴逆时针转动为正方向,绕axis2的z轴逆时针转动为正方向;
18、进一步的,步骤1.2)的具体步骤如下:
19、1.2.1)球模中心作为测试点在axis2坐标系下,分别绕z轴正方向和逆方向转动θ1和θ2角度,根据齐次坐标系转换顺序得到axis2(z)θ,θ={θ1,θ2};其中不同方向的转换矩阵为:
20、
21、将上述矩阵分别左乘相对初始位置得到回转后的运动位pz(θ1)和pz(θ2):
22、
23、1.2.2)同理,在相对axis1坐标下,绕x轴正方向和逆方向分别转动θ1和θ2角度时,可得到axis1(x)θ坐标系,θ={θ1,θ2},不同方向的转换矩阵可表示为:
24、
25、将上述矩阵分别左乘相对axis1初始位置得到回转后的运动位px(θ1)和px(θ2)为:
26、
27、1.2.3)进一步地,在相对axis1坐标下,绕y轴的正方向和逆方向转动θ1和θ2角度,可得到axis1(y)θ坐标系,其中θ={θ1,θ2},不同方向的转换矩阵为:
28、
29、将上述矩阵分别左乘相对axis1初始位置得到回转后的运动位py(θ1)和py(θ2)为:
30、
31、进一步的,步骤1.3)的具体步骤如下:
32、根据绕zt轴旋转后的运动位和初始相对位置求解x,y,z方向的偏移量,表示为:
33、
34、同理,绕yt轴旋转后x,y,z方向的偏移量,表示为:
35、
36、绕xt轴旋转后,x,y,z方向的偏移量,表示为:
37、
38、进一步的,u型支架上面在六维床z方向的使用高度上布置有4组安装孔,每组安装孔两两对称,每个安装孔中底部竖直方向和水平方向均设置有一个销钉孔,每组安装孔一侧均设置有凹槽。
39、进一步的,测试底板上面按六维床在xoy平面的使用区域布置有多组胶片安装组件的固定孔。
40、进一步的,固定盒的形状为长方体、球形体或正方体。
41、进一步的,测试底板上设置有压紧件。
42、本发明提供一种六维床精度测试方法,根据机械正向运动学原理建立转动关节运动补偿的数学模型,利用一套专用测试装置,通过基于核物理胶片分析定位参考点偏差的方法对数学模型的准确性及旋转的运动精度进行验证,通过分析测试数据,得出六维床运动的补偿模型,从而提高六维床运动精度,提高临床的治疗的精准度。
技术特征:
1.一种六维床精度测试方法,其特征在于:所述六维床精度测试方法包括以下步骤:
2.根据权利要求1所述的六维床精度测试方法,其特征在于:所述步骤1.1)的具体步骤如下:
3.根据权利要求2所述的六维床精度测试方法,其特征在于:所述步骤1.2)的具体步骤如下:
4.根据权利要求3所述的六维床精度测试方法,其特征在于:所述步骤1.3)的具体步骤如下:
5.根据权利要求1至4任一所述的六维床精度测试方法,其特征在于:所述u型支架上面在六维床z方向的使用高度上布置有4组安装孔,每组安装孔两两对称,每个安装孔中底部竖直方向和水平方向均设置有一个销钉孔,每组安装孔一侧均设置有凹槽。
6.根据权利要求5所述的六维床精度测试方法,其特征在于:所述测试底板上面按六维床在xoy平面的使用区域布置有多组胶片安装组件的固定孔。
7.根据权利要求6所述的六维床精度测试方法,其特征在于:所述固定盒的形状为长方体、球形体或正方体。
8.根据权利要求7所述的六维床精度测试方法,其特征在于:所述测试底板上设置有压紧件。
技术总结
本发明涉及一种六维床精度测试方法。本发明包括以下步骤:1)建立转动关节运动补偿的数学模型;2)组装六维床精度测试装置;3)将固定盒组件旋转一个角度;4)运动六维床将六维床精度测试装置送至伽玛刀焦点;5)运动六维床旋转轴将固定盒组件调整至与滚筒轴线面平行;6)根据步骤1)的转动关节运动补偿的数学模型计算出的理论补偿量Δx、Δy、Δz,按理论补偿量Δx、Δy、Δz运动六维床;7)伽玛刀出束打到胶片上;8)取出胶片分析,利用扫描设备扫描胶片生成二维图像,输入至ImageJ软件获取胶片的外轮廓,并计算出圆心的像素坐标作为中心点;9)与初始状态的中心点坐标值进行比较计算中心偏差值。本发明通过分析测试数据,得出六维床运动的补偿模型,从而提高六维床运动精度,提高临床的治疗的精准度。
技术研发人员:李山川,李逸群,王俊峰,张晓锋
受保护的技术使用者:中核承影(西安)医疗设备有限公司
技术研发日:
技术公布日:2024/8/13
- 还没有人留言评论。精彩留言会获得点赞!