一种三维血管造影机的制作方法
本发明涉及医用造影成像领域,具体涉及一种三维血管造影机。
背景技术:
1、血管造影机主要用于观察血管病变、血管狭窄的定位测量,以及为介入治疗提供真实的立体图像,是各种介入治疗的必备条件;血管造影技术适用于心脑血管、外周血管、肿瘤的检查和介入微创治疗;血管造影技术的基本原理是将注入造影剂前后拍摄的两帧x线图像经数字化输入图像计算机,通过减影、增强和再成像过程把血管造影影像上的骨与软组织影像消除来获得清晰地纯血管影像,便于医生诊断和进行手术,是电子计算机与常规x线血管造影相结合的一种检查方法;血管造影通过数字化处理,把不需要的组织影像删除掉,只保留血管影像;其特点是图像清晰,分辨率高,对观察血管病变,血管狭窄的定位测量,诊断及介入治疗提供了真实的立体图像,为各种介入治疗提供了必备条件;通过血管造影技术检查,能够准确的治疗血管病变的数目、位置、大小、形态、与周围血管的关系,也可初步预测疾病的发展、出血的风险、梗塞的风险等,是否需要进行干预、如何干预等等。
2、现有技术条件下的血管造影机多为c型臂单通路结构,在进行透视图像采集时一次只能采集一个视向的图像信息,要获得患者体内三维空间的血管影像信息时,只能操控设备改变c型臂的坐标方向,这就需要在注入造影剂前,采集两个视向的图像信息,注入造影剂后再次采集两个相同视向的图像信息,在多次转动c型臂过程中位置的准确度存在不确定性,多次曝光也会使患者所受的辐射剂量显著增加;因此开发一种能够同时对患者的血管系统进行双视向曝光并采集图像,并且注入造影剂前后不需要频繁转动视向角度的双通路血管造影机,在缩短手术时间、减少曝光剂量、降低手术成本,提高手术质量等方面具有显著的意义。
技术实现思路
1、为解决现有技术的不足,本发明的目的在于提供一种三维血管造影机,不仅具有双通路同时曝光的能力,双通路角度也可根据手术需要任意调整,不仅操作方便,也具有极高的灵活性。
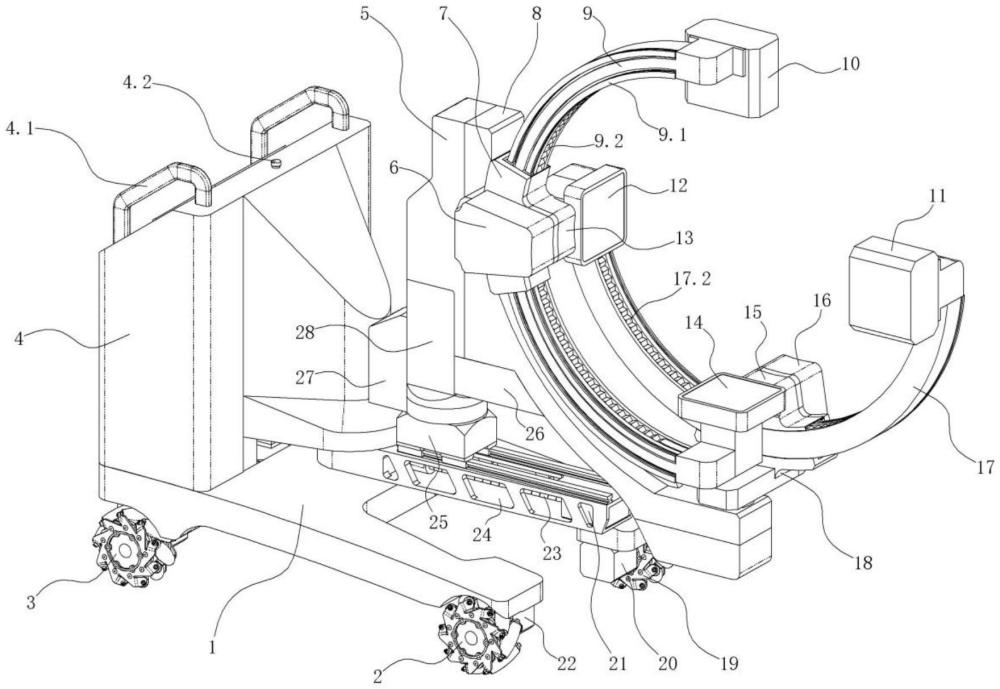
2、本发明采取的技术方案为:一种三维血管造影机,其特征在于:底座后端上侧安装有一个机壳,机壳内部安装有控制系统,底座的下侧安装有四个电机和麦克纳姆轮组成的驱动系统,基座架固定安装于底座后端上侧,基座架的内部安装有摆动电机;纵臂后端与基座架前端转动连接,从而摆动电机可通过齿轮啮合传动结构实现纵臂的摆动和定位,纵臂上侧安装有纵移滑台,纵移电机安装于纵臂前端并可通过丝杠传动结构实现纵移滑台的移动和定位;立臂下端转动安装于纵移滑台上,安装于立臂下端的立臂转动电机可通过齿轮啮合传动结构实现立臂的转动和定位;弧形臂安装于立臂前侧并构成移动副,弧形臂的下侧安装有升降电机,升降电机可通过丝杠传动结构实现弧形臂的上下移动和定位,弧形臂上端水平向设有右臂转孔,右臂转孔中安装有右转架,安装于弧形臂上端的右臂摆转电机可实现右转架的转动和定位,右转架外侧安装有右臂回转电机,弧形臂的前端竖向设有左臂转孔,左臂转孔中安装有左转架,左转架外侧安装有左臂回转电机,安装于弧形臂下端的左臂摆转电机可实现左转架的转动和定位;右臂为半圆环结构,右臂安装于右转架内侧,右臂回转电机可通过齿轮齿圈啮合传动结构实现右臂的回转和定位,右臂的上端左侧安装有一个上发射端,右臂的下端左侧安装有一个下接收端;左臂为半圆环结构,左臂安装于左转架内侧,左臂回转电机可通过齿轮齿圈啮合传动结构实现左臂的回转和定位,左臂的前端右侧安装有一个前发射端,左臂的后端右侧安装有一个后接收端。
3、优选地,所述的机壳上端对称设有两个扶手,两个扶手便于医生双手握持,从而医生可辅助血管造影机的移动。
4、优选地,所述的显示屏可显示血管造影机的相关信息,并能通过触控操作实现人机交互,显示屏与控制系统电性连接。
5、优选地,所述的急停按钮与控制系统电性连接,按压并触发急停按钮后,所述造影机中的所有电机便会停止动作。
6、优选地,所述左臂转孔的中心轴线与右臂转孔的中心轴线相互垂直并位于同一个平面内,并且两个中心轴线的交点与左臂和右臂的回转轴心重合。
7、优选地,所述的上发射端与控制系统电性连接,并可向下发射x射线束。
8、优选地,所述的下接收端内部设有影像增强器,下接收端可用于接收上发射端发出的x射线束,并形成图像信息显示于显示器上,该显示器可放置于方便医生观察的合适位置。
9、优选地,所述的前发射端与控制系统电性连接,并可向后发射x射线束。
10、优选地,所述的后接收端内部设有影像增强器,后接收端可用于接收前发射端发出的x射线束,并形成图像信息显示于显示器上,该显示器可放置于方便医生观察的合适位置。
11、本发明的有益效果:(1)本申请中所涉及的血管造影机具有两个成像通路,能够同时采集两个视向的透视图像信息,从而在注入造影剂前后不需要频繁转动左臂和右臂,不仅能够有效缩短手术时间、减少x射线的曝光剂量,也能有效提高手术质量、降低手术成本;(2)由四个麦克纳姆轮构成的驱动系统可以使造影机实现在地面上的全向移动和任意转动,具有极高的灵活性,能够有效提高血管造影机的转场移动能力,也能有效减少手术中调整血管造影机位置的时间;(3)摆动电机可以通过纵臂实现左臂和右臂的竖轴摆动,纵移电机可以通过纵移滑台实现左臂和右臂的纵轴移动,立臂转动电机可以通过立臂实现左臂和右臂的竖轴转动,升降电机可以通过弧形臂实现左臂和右臂的升降,右臂摆转电机可以通过右转架实现右臂的纵轴转动,右臂回转电机可以通过右臂回转齿轮实现右臂的回转运动,左臂摆转电机可以通过左转架实现左臂的竖轴转动,左臂回转电机可以通过左臂回转齿轮实现左臂的回转运动;由此说明左臂和右臂具有极高的自由度,完全能够满足对患者各个患处、各个角度的透视图像采集工作,这也是现有设备所不能实现的效果。
技术特征:
1.一种三维血管造影机,主要包括:
2.根据权利要求1所述的一种三维血管造影机,其特征在于:所述的机壳上端对称设有两个扶手,两个扶手便于医生双手握持。
3.根据权利要求1所述的一种三维血管造影机,其特征在于:所述的显示屏可显示血管造影机的相关信息,并能通过触控操作实现人机交互,显示屏与控制系统电性连接。
4.根据权利要求1所述的一种三维血管造影机,其特征在于:所述的急停按钮与控制系统电性连接,按压并触发急停按钮后,所述造影机中的所有电机便会停止动作。
5.根据权利要求1所述的一种三维血管造影机,其特征在于:所述左臂转孔的中心轴线与右臂转孔的中心轴线相互垂直并位于同一个平面内。
6.根据权利要求1所述的一种三维血管造影机,其特征在于:所述的上发射端与控制系统电性连接,并可向下发射x射线束。
7.根据权利要求1所述的一种三维血管造影机,其特征在于:所述的下接收端内部设有影像增强器,下接收端可用于接收上发射端发出的x射线束,并形成图像信息显示于供医生观看的显示器上,下接收端与控制系统电性连接。
8.根据权利要求1所述的一种三维血管造影机,其特征在于:所述的前发射端与控制系统电性连接,并可向后发射x射线束。
9.根据权利要求1所述的一种三维血管造影机,其特征在于:所述的后接收端内部设有影像增强器,后接收端可用于接收前发射端发出的x射线束,并形成图像信息显示于供医生观看的显示器上,后接收端与控制系统电性连接。
技术总结
本发明公开一种三维血管造影机,其中的底座上侧安装有一个机壳,机壳上侧设有两个左右对称的扶手和一个显示屏,显示屏可显示设备信息并实现人机交互,底座的下侧安装有驱动系统,基座架固定安装于底座后端上侧,纵臂后端与基座架前端转动连接,纵臂上侧安装有纵移滑台,立臂下端转动安装于纵移滑台上,弧形臂安装于立臂前侧并构成移动副,右转架转动安装于弧形臂上端,右臂为半圆环结构并转动安装于右转架内侧,右臂的上端左侧安装有一个上发射端,右臂的下端左侧安装有一个下接收端;左转架转动安装于弧形臂前端,左臂为半圆环结构并转动安装于左转架内侧,左臂的前端右侧安装有一个前发射端,左臂的后端右侧安装有一个后接收端。
技术研发人员:王至
受保护的技术使用者:王至
技术研发日:
技术公布日:2024/8/13
- 还没有人留言评论。精彩留言会获得点赞!