基于智能陪护机器人的异常行为监控识别方法与流程
本发明涉及图像处理,具体涉及基于智能陪护机器人的异常行为监控识别方法。
背景技术:
1、尽管智能陪护机器人已经在一定程度上满足了人们的需求,但在实际使用中仍然存在一些不足。由于传统智能陪护机器人在应对老年人摔倒或睡眠时的身体姿态变化时,往往受到拍摄角度的限制,无法完整地捕捉到整个身体姿态变化过程,导致机器人在处理摔倒或睡眠情况时存在误判问题,由于拍摄角度无法全面覆盖身体姿态变化的全部细节,机器人无法准确地识别老年人的实际状态,从而难以发出正确的警报或采取适当的行动。
技术实现思路
1、本发明提供基于智能陪护机器人的异常行为监控识别方法,以解决现有的问题。
2、本发明的基于智能陪护机器人的异常行为监控识别方法采用如下技术方案:
3、本发明一个实施例提供了基于智能陪护机器人的异常行为监控识别方法,该方法包括以下步骤:
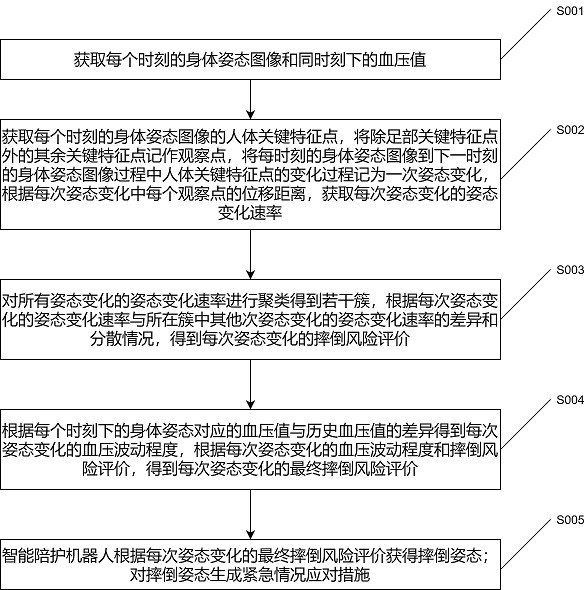
4、获取每个时刻的身体姿态图像和同时刻下的血压值;
5、获取每个时刻的身体姿态图像的人体关键特征点,将除足部关键特征点外的其余关键特征点记作观察点,将每时刻的身体姿态图像到下一时刻的身体姿态图像过程中人体关键特征点的变化过程记为一次姿态变化,根据每次姿态变化中每个观察点的位移距离,获取每次姿态变化的姿态变化速率;
6、对所有姿态变化的姿态变化速率进行聚类得到若干簇,根据每次姿态变化的姿态变化速率与所在簇中其他次姿态变化的姿态变化速率的差异和分散情况,得到每次姿态变化的摔倒风险评价;
7、根据每个时刻下的身体姿态对应的血压值与历史血压值的差异得到每次姿态变化的血压波动程度,根据每次姿态变化的血压波动程度和摔倒风险评价,得到每次姿态变化的最终摔倒风险评价;
8、智能陪护机器人根据每次姿态变化的最终摔倒风险评价获得摔倒姿态;对摔倒姿态生成紧急情况应对措施。
9、进一步地,所述获取每个时刻的身体姿态图像的人体关键特征点包括:
10、将每个时刻的身体姿态图像输入到活动轮廓模型,获取每个时刻的身体姿态图像的人体关键特征点。
11、进一步地,所述每次姿态变化中每个观察点的位移距离的具体获取方式为:
12、将每次姿态变化中,每个观察点在当前时刻与下一时刻的身体姿态图像中纵坐标上距离原点的欧式距离的变化距离,记作每次姿态变化中每个观察点的位移距离。
13、进一步地,所述每次姿态变化的姿态变化速率包括:
14、以正常站立时的足部关键特征点为原点,身体站立方向为纵坐标,与水平地面平行的方向为横坐标,建立直角坐标系;
15、将除足部关键特征点外的其余关键特征点记作观察点,根据每次姿态变化中每个观察点的位移距离以及每次姿态变化的时间,获取每次姿态变化的姿态变化速率。
16、进一步地,所述根据每次姿态变化中每个观察点的位移距离以及每次姿态变化的时间,获取每次姿态变化的姿态变化速率包括:
17、第次姿态变化的姿态变化速率的具体计算公式为:
18、
19、其中,表示第次姿态变化的姿态变化速率;表示第次姿态变化中第个观察点的位移距离;表示第次姿态变化的时间;表示第次姿态变化中观察点的数量。
20、进一步地,所述对所有姿态变化的姿态变化速率进行聚类得到若干簇的具体获取方式为:
21、预设k值,通过k-means聚类算法对每次姿态变化的姿态变化速率进行聚类得到k个簇。
22、进一步地,所述每次姿态变化的摔倒风险评价包括:
23、第次姿态变化的摔倒风险评价的具体计算公式为:
24、
25、其中,表示第次姿态变化的摔倒风险评价;表示第次姿态变化的姿态变化速率所在的簇中姿态变化速率的数量;表示第次姿态变化的姿态变化速率所在的簇中除第次姿态变化的姿态变化速率外的姿态变化速率的数量;表示所有簇中姿态变化速率的数量;表示第次姿态变化的姿态变化速率;表示第次姿态变化的姿态变化速率所在的簇中第个姿态变化速率;表示sigmoid函数;表示取绝对值函数。
26、进一步地,所述每次姿态变化的血压波动程度包括:
27、第次姿态变化的血压波动程度的具体计算公式为:
28、
29、其中,表示第次姿态变化的血压波动程度;表示第次姿态变化的血压值;表示从第一次姿态变化开始到第次姿态变化之间的第次姿态变化的血压值;表示绝对值函数。
30、进一步地,所述每次姿态变化的最终摔倒风险评价包括:
31、将每次姿态变化的血压波动程度与每次姿态变化的摔倒风险评价的乘积进行归一化,归一化结果记为每次姿态变化的最终摔倒风险评价。
32、进一步地,所述根据每次姿态变化的最终摔倒风险评价获得摔倒姿态包括:
33、对于第次姿态变化,预设摔倒风险评价阈值,当第次姿态变化的最终摔倒风险评价大于等于摔倒风险评价阈值时,将第次姿态变化为记为摔倒姿态。
34、本发明的技术方案的有益效果是:获取每个时刻的身体姿态图像和同时刻下的血压值,获取每个时刻的身体姿态图像的人体关键特征点,基于人体关键特征点进行后续对异常行为的分析;将除足部关键特征点外的其余关键特征点记作观察点,将每时刻的身体姿态图像到下一时刻的身体姿态图像过程中人体关键特征点的变化过程记为一次姿态变化,根据每次姿态变化中每个观察点的位移距离,获取每次姿态变化的姿态变化速率,通过姿态变化速率初步判断姿态变化的摔倒风险评价;对所有姿态变化的姿态变化速率进行聚类得到若干簇,通过聚类清楚地了解到每个簇中的姿态变化速率的差异和分散性;根据每次姿态变化的姿态变化速率与所在簇中其他姿态变化的姿态变化速率的差异和分散情况,得到每次姿态变化的摔倒风险评价,为姿态变化的最终摔倒风险评价提供更多依据;根据每个时刻下的身体姿态对应的血压值与历史血压值的差异得到每次姿态变化的血压波动程度,根据每次姿态变化的血压波动程度和摔倒风险评价,得到每次姿态变化的最终摔倒风险评价,为了让陪护机器人对每次姿态变化进行最终的判定,进而采取相应措施;智能陪护机器人根据每次姿态变化的最终摔倒风险评价获得摔倒姿态,对摔倒姿态生成紧急情况应对措施,本发明提高了对老年人的安全保障水平,提高智能陪护机器人对异常行为监控和识别的精确性。
技术特征:
1.基于智能陪护机器人的异常行为监控识别方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述基于智能陪护机器人的异常行为监控识别方法,其特征在于,所述获取每个时刻的身体姿态图像的人体关键特征点包括:
3.根据权利要求1所述基于智能陪护机器人的异常行为监控识别方法,其特征在于,所述每次姿态变化中每个观察点的位移距离的具体获取方式为:
4.根据权利要求3所述基于智能陪护机器人的异常行为监控识别方法,其特征在于,所述每次姿态变化的姿态变化速率包括:
5.根据权利要求4所述基于智能陪护机器人的异常行为监控识别方法,其特征在于,所述根据每次姿态变化中每个观察点的位移距离以及每次姿态变化的时间,获取每次姿态变化的姿态变化速率包括:
6.根据权利要求1所述基于智能陪护机器人的异常行为监控识别方法,其特征在于,所述对所有姿态变化的姿态变化速率进行聚类得到若干簇的具体获取方式为:
7.根据权利要求1所述基于智能陪护机器人的异常行为监控识别方法,其特征在于,所述每次姿态变化的摔倒风险评价包括:
8.根据权利要求1所述基于智能陪护机器人的异常行为监控识别方法,其特征在于,所述每次姿态变化的血压波动程度包括:
9.根据权利要求1所述基于智能陪护机器人的异常行为监控识别方法,其特征在于,所述每次姿态变化的最终摔倒风险评价包括:
10.根据权利要求1所述基于智能陪护机器人的异常行为监控识别方法,其特征在于,所述根据每次姿态变化的最终摔倒风险评价获得摔倒姿态包括:
技术总结
本发明涉及图像处理技术领域,具体涉及基于智能陪护机器人的异常行为监控识别方法,包括:获取每个时刻的身体姿态图像和同时刻下的血压值,获取每次姿态变化的姿态变化速率,得到每次姿态变化的摔倒风险评价,根据每个时刻下的身体姿态对应的血压值与历史血压值的差异得到每次姿态变化的血压波动程度,根据每次姿态变化的血压波动程度和摔倒风险评价,得到每次姿态变化的最终摔倒风险评价,智能陪护机器人根据每次姿态变化的最终摔倒风险评价获得摔倒姿态,对摔倒姿态生成紧急情况应对措施。本发明旨在提高智能陪护机器人对异常行为监控和识别的精确性。
技术研发人员:邹元华,邹佳轩,于明,韩彰秀,汪智勇,胡琴
受保护的技术使用者:深圳市万德昌科技有限公司
技术研发日:
技术公布日:2024/7/23
- 还没有人留言评论。精彩留言会获得点赞!