手术机器人共享控制方法及系统
本公开涉及医疗器械控制领域,尤其涉及一种手术机器人共享控制方法及系统。
背景技术:
1、随着人工智能、机器人技术的不断发展,现有大多数器官手术由医生根据手术情况灵活改变手术方案,实现个性化手术;或者医生使用机器人进行精细化运动控制以完成精准的器官手术。
2、但是,由于手术过程中的不确定因素过多,仅医生手术操作,存在手术精度不高的问题。但换做手术机器人进行手术操作,虽然手术精度高,但手术机器人在器官手术过程中较难处理随机突发的情况,导致手术机器人的运行可靠性较弱。
技术实现思路
1、鉴于上述问题,本公开提供了手术机器人共享控制方法及系统。
2、根据本公开的第一个方面,提供了一种手术机器人共享控制方法,包括:
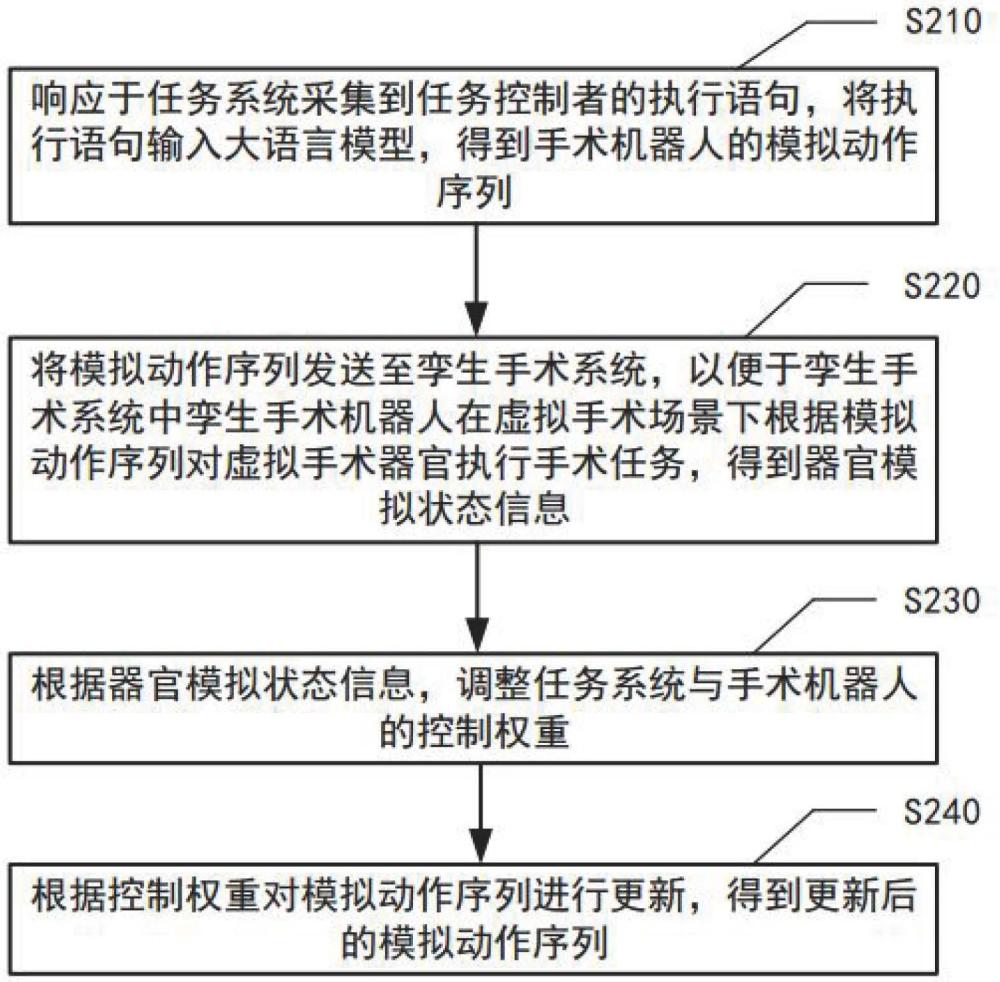
3、响应于任务系统采集到任务控制者的执行语句,将执行语句输入大语言模型,得到手术机器人的模拟动作序列,大语言模型是利用执行语句样本和手术机器人的动作序列样本训练得到的;
4、将模拟动作序列发送至孪生手术系统,以便于孪生手术系统中孪生手术机器人在虚拟手术场景下根据模拟动作序列对虚拟手术器官执行手术任务,得到器官模拟状态信息,器官模拟状态信息表征在真实手术场景下手术机器人根据模拟动作序列对手术器官执行手术任务得到的器官生物状态参数;
5、根据器官模拟状态信息,调整任务系统与手术机器人的控制权重;
6、根据控制权重对模拟动作序列进行更新,得到更新后的模拟动作序列,更新后的模拟动作序列用于手术机器人在真实手术场景下对手术器官执行手术任务。
7、根据本公开的实施例,响应于任务系统采集到任务控制者的执行语句,将执行语句输入大语言模型,得到手术机器人的模拟动作序列包括:响应于任务系统采集到任务控制者的执行语句,通过大语言模型的嵌入层对执行语句进行向量化处理,得到执行向量;将执行向量与手术知识图谱中执行语句节点进行匹配,得到手术机器人的模拟动作序列,手术知识图谱是将执行语句样本、手术场景信息样本和动作序列样本输入推理引擎得到的,执行语句节点表征执行语句样本。
8、根据本公开的实施例,真实手术场景信息包括手术器官、手术机器人的部位信息、手术器械信息和手术方式信息,虚拟手术场景是基于真实手术场景信息进行建模得到的。
9、根据本公开的实施例,根据器官模拟状态信息,调整任务系统与孪生手术系统的控制权重包括:将器官模拟状态信息与手术机器人的真实执行状态信息进行比较,得到比较结果,真实执行状态信息是孪生手术机器人根据规划路径执行手术任务得到的,规划路径是手术机器人的控制系统根据执行语句进行路径规划得到的;根据比较结果调整任务系统与手术机器人的控制权重。
10、根据本公开的实施例,根据比较结果调整任务系统与手术机器人的控制权重包括:根据比较结果和手术任务的实时任务信息调整任务系统与手术机器人的控制权重。
11、根据本公开的实施例,手术机器人的控制系统是通过前馈控制算法、反馈控制算法、自适应控制算法和滑模控制算法中至少一种算法根据执行语句进行路径规划,得到与执行语句对应的规划路径。
12、根据本公开的实施例,根据控制权重对模拟动作序列进行更新,得到更新后的模拟动作序列包括:在控制权重大于第一预设阈值的情况下,根据任务系统采集到任务控制者的辅助语句对模拟动作序列进行更新,得到更新后的模拟动作序列;在控制权重小于第二预设阈值的情况下,将规划路径确定为更新后的模拟动作序列。
13、根据本公开的实施例,上述方法还包括:在模拟动作序列与规划路径之间的偏差满足偏差阈值的情况下,根据器官模拟状态信息生成反馈指令;将反馈指令发送至任务系统。
14、本公开的第二方面提供了一种手术机器人共享控制系统,包括:任务系统,用于采集任务控制者的执行语句;共享控制系统,用于将执行语句输入大语言模型,得到手术机器人的模拟动作序列,并将模拟动作序列发送至孪生手术系统,大语言模型是利用执行语句样本和手术机器人的动作序列样本训练得到的;孪生手术系统,孪生手术系统包括与手术机器人对应的孪生手术机器人,孪生手术机器人在虚拟手术场景下根据模拟动作序列对虚拟手术器官执行手术任务,得到器官模拟状态信息,器官模拟状态信息表征在真实手术场景下手术机器人根据模拟动作序列对手术器官执行手术任务得到的器官生物状态参数;共享控制系统,用于根据器官模拟状态信息,调整任务系统与手术机器人的控制权重;根据控制权重对模拟动作序列进行更新,得到更新后的模拟动作序列;更新后的模拟动作序列用于手术机器人在真实手术场景下执行手术任务。
15、根据本公开的实施例,手术机器人包括控制系统;根据器官模拟状态信息,调整任务系统与孪生手术系统的控制权重包括:将器官模拟状态信息与手术机器人的真实执行状态信息进行比较,得到比较结果,真实执行状态信息是孪生手术系统中孪生手术机器人根据规划路径执行手术任务得到的,规划路径是手术机器人的控制系统根据执行语句进行路径规划得到的;根据比较结果调整任务系统与手术机器人的控制权重。
16、根据本公开提供的手术机器人共享控制方法及系统,通过响应于任务系统采集到任务控制者的执行语句,将执行语句输入大语言模型,得到手术机器人的模拟动作序列,大语言模型是利用执行语句样本和所述手术机器人的动作序列样本训练得到的。通过大语言模型将任务控制者的执行语句解析成手术机器人的模拟动作序列。
17、将模拟动作序列发送至孪生手术系统,以便于孪生手术系统中孪生手术机器人在虚拟手术场景下根据模拟动作序列对虚拟手术器官执行手术任务,得到器官模拟状态信息,实现对任务控制者的执行语句进行模拟操作。
18、根据器官模拟状态信息,调整任务系统与手术机器人的控制权重,以保证手术任务的顺利执行;根据控制权重对模拟动作序列进行更新,得到更新后的模拟动作序列,更新后的模拟动作序列用于手术机器人在真实手术场景下对手术器官执行手术任务,实现任务控制者与手术机器人之间的协同合作,实现手术方案的个性化,提高了手术机器人的运行可靠性。
技术特征:
1.一种手术机器人共享控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述响应于任务系统采集到任务控制者的执行语句,将所述执行语句输入大语言模型,得到手术机器人的模拟动作序列包括:
3.根据权利要求2所述的方法,其特征在于,所述真实手术场景信息包括所述手术器官、所述手术机器人的部位信息、手术器械信息和手术方式信息,所述虚拟手术场景是基于所述真实手术场景信息进行建模得到的。
4.根据权利要求1所述的方法,其特征在于,所述根据所述器官模拟状态信息,调整所述任务系统与所述孪生手术系统的控制权重包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述比较结果调整所述任务系统与所述手术机器人的控制权重包括:
6.根据权利要求4所述的方法,其特征在于,所述手术机器人的控制系统是通过前馈控制算法、反馈控制算法、自适应控制算法和滑模控制算法中至少一种算法根据所述执行语句进行路径规划,得到与所述执行语句对应的所述规划路径。
7.根据权利要求1所述的方法,其特征在于,所述根据所述控制权重对所述模拟动作序列进行更新,得到更新后的模拟动作序列包括:
8.根据权利要求1所述的方法,其特征在于,所述方法还包括:
9.一种手术机器人共享控制系统,其特征在于,所述系统包括:
10.根据权利要求9所述的系统,其特征在于,所述手术机器人包括控制系统;
技术总结
本公开提供了一种手术机器人共享控制方法及系统,可以应用于医疗器械控制领域。该方法包括:响应于任务系统采集到任务控制者的执行语句,将执行语句输入大语言模型,得到手术机器人的模拟动作序列;将模拟动作序列发送至孪生手术系统,以便于孪生手术系统中孪生手术机器人在虚拟手术场景下根据模拟动作序列对虚拟手术器官执行手术任务,得到器官模拟状态信息;根据器官模拟状态信息,调整任务系统与手术机器人的控制权重;根据控制权重对模拟动作序列进行更新,得到更新后的模拟动作序列,更新后的模拟动作序列用于手术机器人在真实手术场景下对手术器官执行手术任务。本公开促进手术机器人的智能化和人机协作,提升手术的精确度、安全性和效率。
技术研发人员:易波,郑鸿志,李建民,高原,赵建厂,关博
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/9/5
- 还没有人留言评论。精彩留言会获得点赞!