骨科手术引导方法、装置及骨科手术引导设备与流程
本申请实施例属于计算机辅助医疗,特别是涉及一种骨科手术引导方法、装置及骨科手术引导设备。
背景技术:
1、在骨科手术中,打孔和截骨是常见的两种手术操作,打孔和截骨的精度直接影响到手术效果和患者康复。传统的骨科手术中,打孔和截骨通常依靠手术医生的经验和技能,手术精度难以得到有效保证。随着手术机器人技术的发展,计算机辅助进行骨科手术逐渐成为研究的热点。
2、在计算机辅助进行骨科手术的过程中,通常需要使用到引导板工具来进行手术引导。例如,在需要截骨操作时,通过在机械臂末端安装截骨所需的引导板,从而可以在截骨时限制锯片的活动平面,保证锯片在安全的范围内进行截骨;在需要打孔操作时,机械臂末端安装的引导板需要更换为打孔所需的引导板,这样可以在打孔时通过引导板限制工具执行打孔操作的方向和深度,保证打孔安全。在执行不同的手术操作时,手术医生需要更换引导板工具并重新进行配准等操作,导致手术效率较低。并且,多次更换引导板也容易降低手术操作的精度。
技术实现思路
1、有鉴于此,本申请实施例提供了一种骨科手术引导方法、装置及骨科手术引导设备,可以基于同一引导板对骨科手术中的截骨操作和打孔操作提供引导,通过精确的导航和机械臂控制,实现对手术目标的精确定位和操作,提高手术精度和手术效率。
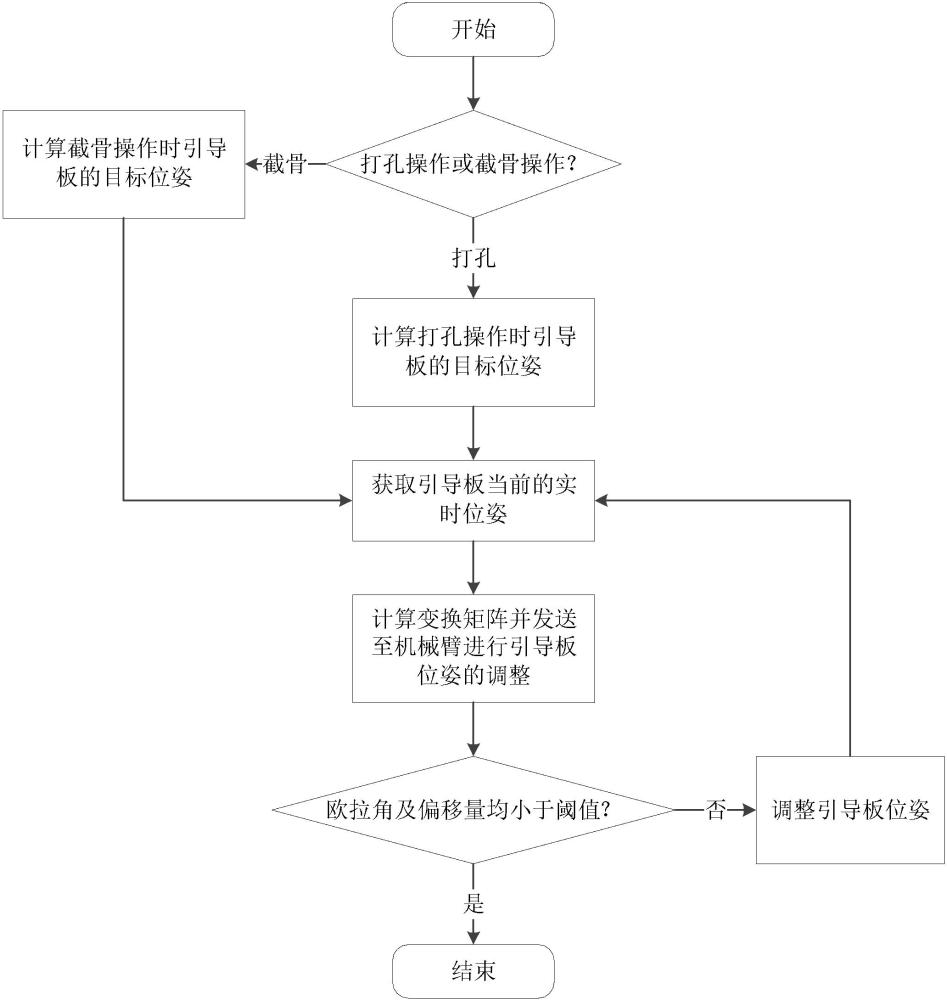
2、本申请实施例的第一方面提供了一种骨科手术引导方法,包括:
3、获取当前骨科手术的术前规划信息;
4、根据所述术前规划信息,确定术中使用的引导板的目标位姿,所述引导板上设计有至少一个圆形孔和至少一个方形槽,所述圆形孔用于引导进行打孔操作,所述方形槽用于引导进行截骨操作;
5、检测安装于机械臂末端的所述引导板当前的实时位姿;
6、通过控制所述机械臂的移动,将所述引导板由所述实时位姿调整至所述目标位姿。
7、在第一方面的一种可能的实现方式中,所述方法还包括:
8、基于所述引导板的目标位姿,监测手术过程中使用的手术工具的位置和状态;
9、根据所述手术工具的位置和状态对操作异常进行监测;
10、当监测到操作异常时,对所述操作异常进行报警。
11、本申请实施例的第二方面提供了一种骨科手术引导装置,包括:
12、获取模块,用于获取当前骨科手术的术前规划信息;
13、确定模块,用于根据所述术前规划信息,确定术中使用的引导板的目标位姿,所述引导板上设计有至少一个圆形孔和至少一个方形槽,所述圆形孔用于引导进行打孔操作,所述方形槽用于引导进行截骨操作;
14、检测模块,用于检测安装于机械臂末端的所述引导板当前的实时位姿;
15、控制模块,用于通过控制所述机械臂的移动,将所述引导板由所述实时位姿调整至所述目标位姿。
16、本申请实施例的第三方面提供了一种骨科手术引导设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面所述的骨科手术引导方法。
17、本申请实施例的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的骨科手术引导方法。
18、本申请实施例的第五方面提供了一种计算机程序产品,当所述计算机程序产品在计算机上运行时,使得所述计算机执行上述第一方面所述的骨科手术引导方法。
19、与现有技术相比,本申请实施例具有以下有益效果:
20、本申请实施例,在进行骨科手术引导时,可以使用同一个引导板,该引导板上可以设计有至少一个圆形孔和至少一个方形槽,其中圆形孔可以用于引导进行打孔操作,方形槽可以用于引导进行截骨操作。这样,无论是截骨还是打孔,都可以使用同一个引导板,而无需在每次截骨或打孔前,更换机械臂末端的引导板。在将上述引导板安装至机械臂末端后,通过获取当前骨科手术的术前规划信息,可以术前规划信息确定术中使用的引导板的目标位姿,在检测到引导板当前的实时位姿后,可以通过控制机械臂的移动,将引导板由当前的实时位姿调整至目标位姿。采用本方法,可以基于同一引导板对骨科手术中的截骨操作和打孔操作提供引导,显著减少了手术准备时间和手术中切换工具的次数,提高了整体的手术效率。并且,通过精确的导航和机械臂控制,确保了在截骨和打孔过程中,手术工具按照预定的路径和深度进行操作,大大提高了手术的精度,实现了对手术目标的精确定位和操作。
21、本申请实施例提供的骨科手术引导方法、装置及骨科手术引导设备,可以应用于使用骨科手术导航在关节置换手术(如髋关节、膝关节置换)、骨折复位手术、骨肿瘤切除手术等各种类型的手术中,使用本方法、装置及设备进行术前规划和术中导航,可以提高手术精度和安全性。在骨科手术模拟器中集成本申请实施例提供的技术,可以为医生提供具有真实感的手术模拟训练,特别是在复杂骨折处理和精密手术操作方面。
技术特征:
1.一种骨科手术引导方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述通过控制所述机械臂的移动,将所述引导板由所述实时位姿调整至所述目标位姿,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述变换矩阵控制所述机械臂进行旋转和/或位移,使得安装于所述机械臂末端的引导板调整至所述目标位姿,包括:
4.根据权利要求2或3所述的方法,其特征在于,所述计算所述实时位姿与所述目标位姿之间的变换矩阵,包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述第一变换矩阵、所述第二变换矩阵和所述第三变换矩阵,确定所述引导板坐标系到所述术中骨模型坐标系的变换矩阵,作为所述实时位姿与所述目标位姿之间的变换矩阵,包括:
6.根据权利要求1-3或5任一项所述的方法,其特征在于,所述根据所述术前规划信息,确定术中使用的引导板的目标位姿,包括:
7.根据权利要求6所述的方法,其特征在于,所述基于所述目标位姿矩阵,确定术中执行所述手术操作时使用的所述引导板的目标位姿,包括:
8.根据权利要求7所述的方法,其特征在于,所述引导板坐标系的原点为所述引导板中的圆形孔的圆心,所述引导板中的方形槽具有相对于所述引导板坐标系固定设置的偏置量,所述使用所述第一平移向量左乘所述配准矩阵,得到截骨平移向量,包括:
9.根据权利要求6所述的方法,其特征在于,所述基于所述目标位姿矩阵,确定术中执行所述手术操作时使用的所述引导板的目标位姿,包括:
10.根据权利要求9所述的方法,其特征在于,所述使用所述第二平移向量左乘所述配准矩阵,得到打孔平移向量,包括:
11.一种骨科手术引导设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-10任一项所述的骨科手术引导方法。
技术总结
本申请实施例适用于计算机辅助医疗技术领域,提供了一种骨科手术引导方法、装置及骨科手术引导设备,所述方法包括:获取当前骨科手术的术前规划信息;根据所述术前规划信息,确定术中使用的引导板的目标位姿,所述引导板上设计有至少一个圆形孔和至少一个方形槽,所述圆形孔用于引导进行打孔操作,所述方形槽用于引导进行截骨操作;检测安装于机械臂末端的所述引导板当前的实时位姿;通过控制所述机械臂的移动,将所述引导板由所述实时位姿调整至所述目标位姿。采用上述方法,可以基于同一引导板对骨科手术中的截骨操作和打孔操作提供引导,通过精确的导航和机械臂控制,实现对手术目标的精确定位和操作。
技术研发人员:孟李艾俐,周伟锋,刘向东,冯钰翔
受保护的技术使用者:骨圣元化机器人(深圳)有限公司
技术研发日:
技术公布日:2024/9/2
- 还没有人留言评论。精彩留言会获得点赞!