一种神经调控康复机器人系统的制作方法
本申请涉及康复医疗,特别是涉及一种神经调控康复机器人系统。
背景技术:
1、神经退行性疾病和精神类疾病的临床表现各异,导致仍缺乏有效的针对性治疗和康复方案。近年来,研究发现,基于电、磁、光、声等手段开发的新型神经调控技术,可以有效地治疗或缓解各类药物难治性精神类疾病的临床症状。目前已有红外光学导航定位的机器人辅助系统。治疗前,医生在病人头部及机械臂上固定红外反射小球。系统发射红外光,被小球反射后捕捉,计算时间和角度确定三维位置。机器人辅助定位神经调控刺激器至目标区域完成刺激。
2、然而现有的系统存在以下问题:1)现有系统应用效果差,临床与实验误差大,复现能力弱;2)红外光学导航系统受环境干扰,对光学要求高,存在遮挡现象,导致定位丢失,患者佩戴标志物不适,晃动大,配准精度低;3)导航机器人系统多源自工业机器人技术移植,安全性关注不足,结构大,不适合狭小空间,空间灵巧度和定位精度低,难以覆盖全脑刺激目标区域;4)不可达目标区域需人工定位导航,耗时费力;5)刺激器类型受限,无法扩展以满足不同调控需求。
技术实现思路
1、本申请的目的是提供一种神经调控康复机器人系统,能够提高治疗的精确性和有效性。
2、为实现上述目的,本申请提供了如下方案:
3、第一方面,本申请提供了一种神经调控康复机器人系统,包括:
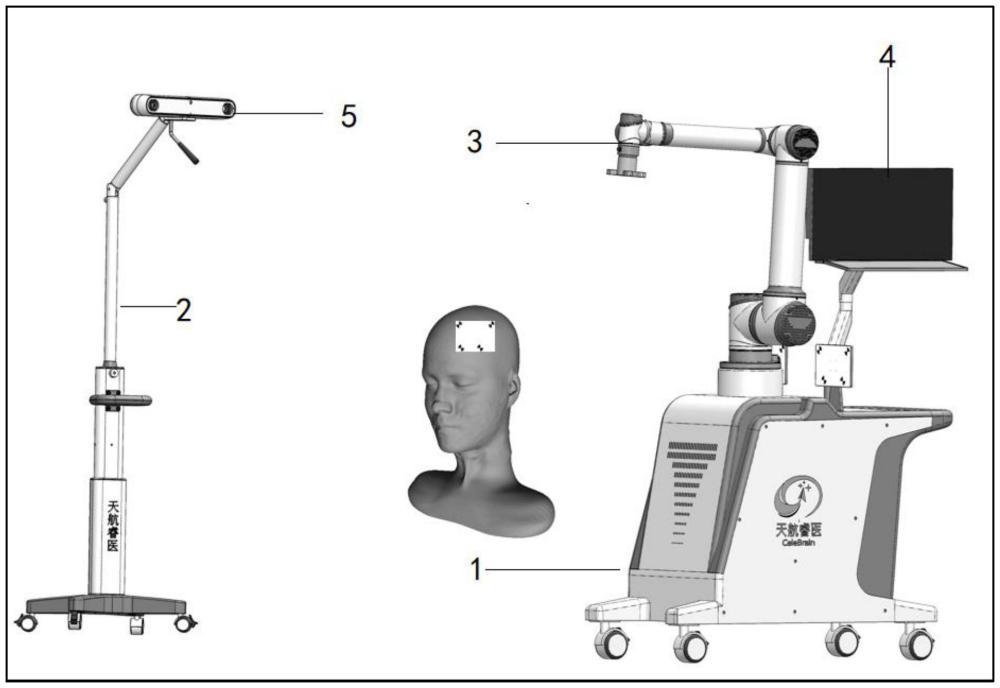
4、所述硬件结构包括:主体台车和双目摄像头定位装置;
5、所述主体台车上设有用于固定调控刺激器的医疗协作机器人;所述医疗协作机器人的末端设置有用于固定调控刺激器的快拆结构;所述主体台车上还设有人机交互显示屏;所述双目摄像头定位装置用于实时捕捉患者的位置和姿态信息。
6、所述软件部分包括:主控模块、康复策略生成模块、通讯模块、定位程序控制模块和机器人控制模块。
7、所述主控模块通过通信模块与定位程序控制模块、机器人控制模块建立实时的通信连接;所述定位程序控制模块用于控制医疗协作机器人对患者的神经调控靶点进行定位;所述机器人控制模块用于基于动作指令控制医疗协作机器人发生动作。
8、所述康复策略生成模块用于根据患者信息,生成特定的康复策略。
9、可选的,所述康复策略生成模块,具体包括:脑影像数据预处理子模块、调控靶点计算子模块和调控方案预装载子模块。
10、所述脑影像数据预处理子模块,用于:对患者的脑影像数据进行数据处理,得到处理后的脑影像数据;所述数据处理包括:基于脑影像数据中的弥散加权影像,将脑影像数据中的病灶图像通过线性变换配准至mni标准空间以及对脑影像数据中的静息态功能磁共振影像进行标准化处理。
11、所述调控靶点计算子模块,用于基于处理后的脑影像数据,对弥散加权影像和静息态功能磁共振影像进行分析,得到患者脑网络中的功能和结构失联区域,并基于失联区域确定所述患者的神经调控靶点位置。
12、所述调控方案预装载子模块,用于根据所述患者的病情和神经调控靶点位置,从预装载的调控方案库中选择匹配的调控方案;所述调控方案是根据神经调控技术、调控参数设置、应用场景、适用症状、靶点位置和刺激参数构成的。
13、可选的,所述通讯模块的通信方式包括websocket和http;所述通讯模块的信息传输方式包括图像数据和json格式的字符串数据。
14、可选的,所述定位程序控制模块,具体包括:摄像头参数配置子模块、光学标志物校准子模块和定位效果验证子模块。
15、所述摄像头参数配置子模块,用于对摄像头进行初始化和参数设置;所述参数配置包括分辨率、帧率、曝光时间、焦距参数的配置。
16、所述光学标志物校准子模块,用于基于图像处理算法,识别和跟踪光学标志物的位置,并使用人脸点云配准算法将光学标志物的位置与患者的脑部影像数据进行配准。
17、所述定位效果验证子模块,用于对配准的结果进行验证和调整。
18、可选的,所述机器人控制模块,具体包括:运动仿真子模块、运动控制子模块和负载/力传感器校准子模块。
19、所述运动仿真子模块,用于通过三维建模技术,加载患者和康复设备的三维模型,并构建与实际治疗环境一致的虚拟场景;根据定位程序控制模块的目标位置,规划机器人的运动轨迹。
20、所述运动控制子模块,用于将运动仿真子模块中生成的运动路径和参数转化为实际的操作指令,控制机器人执行预定的动作。
21、所述负载/力传感器校准子模块,用于对医疗协作机器人采用的六维力和力矩传感器进行静态标定,测量和校准负载的重心位置和力矩参数。
22、可选的,还包括:人机交互界面模块;所述人机交互界面模块用于查看调控过程中的各种数据和反馈信息。
23、可选的,所述双目摄像头定位装置的底部设置有四个可旋转轮子;双目摄像头安装在一个可伸缩的支架上,所述支架的一端设置有俯仰角调节结构,所述俯仰角调节结构与双目摄像头连接。
24、可选的,所述医疗协作机器人拥有六个自由度;所述六个自由度包括:x轴平移、y轴平移、z轴平移、x轴旋转、y轴旋转和z轴旋转。
25、可选的,所述快拆结构的一端固定在医疗协作机器人的机械臂末端,所述机械臂末端有四个m6的螺丝孔,所述快拆结构的一端通过四个m6的螺丝固定到所述机械臂末端;所述快拆结构的另一端设置有一个定位孔、横杆和四根立柱;四根立柱通过四个m4的螺丝与调控刺激器连接,调控刺激器的连接部分还包括一个弹簧卡扣和定位孔,将调控刺激器的连接部分的定位孔与快拆结构的定位孔对齐,通过横杆,使弹簧卡扣固定在快拆结构。
26、可选的,所述人机交互显示屏为能够沿z轴进行360度旋转的显示屏。
27、根据本申请提供的具体实施例,本申请公开了以下技术效果:
28、本申请提供了一种神经调控康复机器人系统,硬件结构由主体台车和双目摄像头定位装置组成。主体台车上安装有医疗协作机器人,用于固定调控刺激器,并且该机器人的末端配备有快拆结构以便于调控刺激器的更换。此外,主体台车上还设有用于人机交互的显示屏。双目摄像头定位装置负责实时捕捉患者的位置和姿态信息。软件部分则包括主控模块、康复策略生成模块、通讯模块、定位程序控制模块和机器人控制模块。主控模块通过通讯模块与定位程序控制模块、机器人控制模块建立实时通信连接。定位程序控制模块的作用是控制医疗协作机器人对患者的神经调控靶点进行精确的定位。机器人控制模块则负责根据动作指令控制医疗协作机器人的动作。康复策略生成模块根据患者的具体信息,生成个性化的康复策略。基于本申请提供的系统能够提高治疗的精确性和有效性。
技术特征:
1.一种神经调控康复机器人系统,其特征在于,包括:硬件结构和软件部分;
2.根据权利要求1所述的一种神经调控康复机器人系统,其特征在于,所述康复策略生成模块具体包括:脑影像数据预处理子模块、调控靶点计算子模块和调控方案预装载子模块;
3.根据权利要求1所述的一种神经调控康复机器人系统,其特征在于,所述通讯模块的通信方式包括websocket和http;所述通讯模块的信息传输方式包括图像数据和json格式的字符串数据。
4.根据权利要求1所述的一种神经调控康复机器人系统,其特征在于,所述定位程序控制模块,具体包括:摄像头参数配置子模块、光学标志物校准子模块和定位效果验证子模块;
5.根据权利要求1所述的一种神经调控康复机器人系统,其特征在于,所述机器人控制模块,具体包括:运动仿真子模块、运动控制子模块和负载/力传感器校准子模块;
6.根据权利要求1所述的一种神经调控康复机器人系统,其特征在于,还包括:人机交互界面模块;所述人机交互界面模块用于查看调控过程中的各种数据和反馈信息。
7.根据权利要求1所述的一种神经调控康复机器人系统,其特征在于,所述双目摄像头定位装置的底部设置有四个可旋转轮子;双目摄像头安装在一个可伸缩的支架上,所述支架的一端设置有俯仰角调节结构,所述俯仰角调节结构与双目摄像头连接。
8.根据权利要求1所述的一种神经调控康复机器人系统,其特征在于,所述医疗协作机器人拥有六个自由度;所述六个自由度包括:x轴平移、y轴平移、z轴平移、x轴旋转、y轴旋转和z轴旋转。
9.根据权利要求1所述的一种神经调控康复机器人系统,其特征在于,所述快拆结构的一端固定在医疗协作机器人的机械臂末端,所述机械臂末端有四个m6的螺丝孔,所述快拆结构的一端通过四个m6的螺丝固定到所述机械臂末端;所述快拆结构的另一端设置有一个定位孔、横杆和四根立柱;四根立柱通过四个m4的螺丝与调控刺激器连接,调控刺激器的连接部分还包括一个弹簧卡扣和定位孔,将调控刺激器的连接部分的定位孔与快拆结构的定位孔对齐,通过横杆,使弹簧卡扣固定在快拆结构。
10.根据权利要求1所述的一种神经调控康复机器人系统,其特征在于,所述人机交互显示屏为能够沿z轴进行360度旋转的显示屏。
技术总结
本申请公开了一种神经调控康复机器人系统,涉及康复医疗技术领域,该系统包括硬件结构和软件部分硬件结构含主体台车与双目摄像头定位装置;主体台车搭载医疗协作机器人,末端设快拆结构固定调控刺激器,并配人机交互显示屏;双目摄像头定位装置实时捕捉患者位置与姿态信息;软件含主控、康复策略生成、通讯、定位程序控制、机器人控制模块;主控模块通过通信模块与其他模块建立实时连接;定位程序控制模块负责医疗协作机器人对神经调控靶点的定位;机器人控制模块根据动作指令控制机器人动作。康复策略生成模块根据患者信息生成康复策略。基于本申请提供的系统能够提高治疗的精确性和有效性。
技术研发人员:刘涛,蓝鑫隆,张烁,刘文勇,刘浩,周怡君,刘子阳
受保护的技术使用者:北京天航睿医科技有限公司
技术研发日:
技术公布日:2024/10/21
- 还没有人留言评论。精彩留言会获得点赞!