本公开涉及用于食道的真空抽吸粘附结合患者食道的机械移位的医疗装置和方法。
背景技术:
1、据预测,经历心房颤动(“af”)的患者数量将在20年内增加到1000万。af患者的治疗费用从每年2,000美元到超过10,000美元不等。治疗af的最有效且普遍的方法是使用称为导管消融的规程。导管消融被设计成通过放置于心脏左心房的导管递送能量(例如,射频和低温能量)。消融导致心脏细胞受到破坏。目标消融的心脏区域是引起af的区域。左心房中的这些区域位于食道的2-4毫米内,因此主要问题在于来自消融导管的能量可向前辐射并损伤食道。在美国,每年大约进行103,000次af消融规程,并且在美国以外进行另外57,000次规程。af消融规程的严重并发症是食道损伤导致心房食道瘘。由于消融能量使心脏和食道发炎而在食道和心脏之间发生这种连通。随后的愈合导致在心脏(无菌器官)和食道(非无菌器官)之间形成孔/连通。这种连通可能导致心脏受到感染和引起中风。约0.6%的患者出现心房食道瘘,结果几乎总是致命的或伴随有显著的发病率。此外,心房食道瘘的前兆是食道溃疡,这也是食道损伤的原因,约30%的患者会出现这种情况。因此,电生理学家,即执行消融规程的医生,非常关心的是防止食道受损和避免心房食道瘘。
2、常规疗法包括将装置插入食道中以监测温度且一旦腔内食道温度发生变化就中止消融能量的递送。然而,这些装置无法使食道远离消融能量源移位,因此不能提供主动保护机制来防止食道受损。
3、因此,需要用于使食道移位的改进系统,以降低食道受损的风险。
技术实现思路
1、提供了用于食道的真空抽吸粘附和机械移位的装置、系统和方法。具体地,公开了与真空系统和食道定位装置一起使用的组件。还公开了机械食道移位系统和使用方法。
2、食道是柔韧的肌肉器官,并且在医疗规程期间经常会移动。如果仅仅施加机械力来移动食道,则可能导致食道隆起而不是器官区域的实际移动和移位。更具体地,机械力将使食道壁的前缘移位,而如果有的话,食道壁的后缘将仅仅移动一小段距离。由此引起的食道隆起不能提供机械移位的保护性益处。本文公开的系统利用抽吸真空来向食道施加均匀的力以吸入食道壁并以周向方式粘附食道壁。在这种生理条件下,随着机械力的施加,食道的整个周向段都被移位并且食道的后缘无滞后。一般来讲,食道经由该组件遵循食道定位装置的方向变化。通过使用射线不可透标记物,这种方向变化可能很容易在x射线设备上对医生可视化。可视化为医生提供即时反馈。通过将食道移动到消融场之外,af规程可以相对安全地进行而不存在对食道造成损伤的风险,并且操作者可以放心地消融目标区域而不用担心食道受损。
3、示例性组件包括与真空系统和食道定位装置一起使用的导入器。该食道定位装置包括手柄、第一区段、第二区段和关节运动驱动机构。第一区段联接到手柄。第二区段枢转地连接到第一区段。该关节运动驱动机构被配置为在关节运动时使第二区段围绕第一区段枢转。在一些实施方案中,第二区段的尺寸设定成在关节运动时使食道壁移位约4厘米。
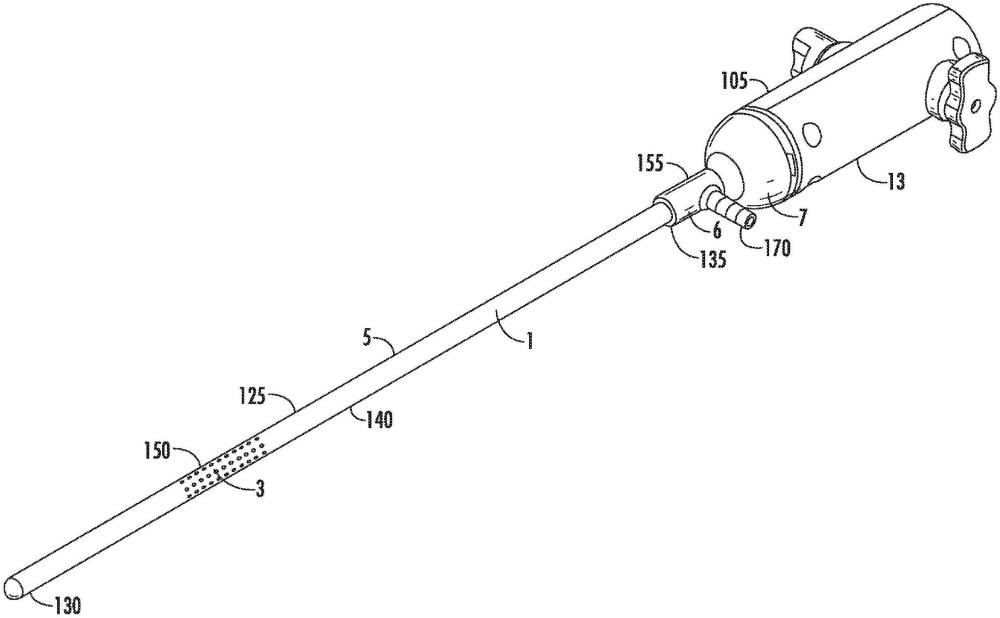
4、该示例性组件的导入器包括软循环外管和管尖端。该软外管的尺寸设定成通过口或鼻通道进入食道,其中软外管包括远侧端部、近侧端部、管腔和主体。外管的主体包括穿孔外表面和一个或多个内部真空通道,该一个或多个内部真空通道在外管的主体内从近侧端部向远侧端部延伸某一距离。在一些实施方案中,该穿孔外表面包括多个真空孔,该多个真空孔围绕软外管周向地间隔开并从其径向延伸。由于多个真空孔围绕软外管周向地间隔开,因此多个真空孔定位在管的多个侧面上并可以从多个方向抽吸食道。一个或多个内部真空通道与多个真空孔流体连通,以经由真空系统向食道壁施加真空。管尖端定位在外管的远侧端部处。
5、示例性机械食道移位系统包括组件和食道定位装置,其中该组件可操作地联接到真空系统。该组件包括导入器,该导入器包括软循环外管和管尖端。该软外管的尺寸设定成通过口或鼻通道进入食道,其中软外管包括远侧端部、近侧端部、管腔和主体。外管的主体包括穿孔外表面和一个或多个内部真空通道,该一个或多个内部真空通道在外管的主体内从近侧端部向远侧端部延伸某一距离。在一些实施方案中,该穿孔外表面包括多个真空孔,该多个真空孔围绕软外管周向地间隔开并从其径向延伸。由于多个真空孔围绕软外管周向地间隔开,因此多个真空孔定位在管的多个侧面上并可以从多个方向抽吸食道。一个或多个内部真空通道与多个真空孔流体连通,以经由真空系统向食道壁施加真空。管尖端定位在外管的远侧端部处。
6、该示例性机械食道移位系统的食道定位装置包括手柄、第一区段、第二区段和关节运动驱动机构。第一区段联接到手柄。第二区段枢转地连接到第一区段。该关节运动驱动机构被配置为在关节运动时使第二区段围绕第一区段枢转。
7、使用机械食道移位系统的示例性方法包括将组件经由口或鼻通道插入患者的食道中。该组件包括导入器,该导入器具有软循环外管、真空端口和管尖端。该软外管的尺寸设定成通过口或鼻通道进入食道,其中软外管包括远侧端部、近侧端部、管腔和主体。外管的主体包括穿孔外表面和一个或多个内部真空通道,该一个或多个内部真空通道在外管的主体内从近侧端部向远侧端部延伸某一距离。在一些实施方案中,该穿孔外表面包括多个真空孔,该多个真空孔围绕软外管周向地间隔开并从其径向延伸。由于多个真空孔围绕软外管周向地间隔开,因此多个真空孔定位在管的多个侧面上并可以从多个方向抽吸食道。一个或多个内部真空通道与多个真空孔流体连通,以经由真空系统向食道壁施加真空。管尖端定位在外管的远侧端部处。真空端口包括真空端口主体、真空管线吊钩和真空端口盖。
8、该示例性方法还包括将食道定位装置推进穿过导入器的外管,其中食道定位装置包括手柄、第一区段、第二区段和关节运动驱动机构。第一区段联接到手柄。第二区段枢转地连接到第一区段。该关节运动驱动机构被配置为在关节运动时使第二区段围绕第一区段枢转。
9、该示例性方法还包括:将食道定位装置的手柄按扣到导入器的真空端口盖;接合真空系统以将外管的一部分粘附到食道壁;以及使关节运动驱动机构关节运动以使第二区段围绕第一区段枢转到选定角度。
10、在附图和下面的描述中阐述了本公开的一个或多个实施方案的细节。根据描述、附图和权利要求,本公开的其他特征、目的和优点将显而易见。
技术特征:1.一种与真空系统和食道定位装置一起使用的组件,所述食道定位装置包括第一区段和第二区段,其中,第一区段具有中心轴线并且第二区段具有枢转地连接到第一区段的近侧端部以及与该近侧端部相反并间隔开的远侧端部,所述第二区段在进行关节运动时能够绕第一区段在第一位置和第二位置之间枢转,其中,在第一位置,所述第二区段的远侧端部沿着所述中心轴线设置,并且在第二位置,所述第二区段的远侧端部从所述中心轴线移位,所述组件包括:
2.根据权利要求1所述的组件,其中,当所述食道定位装置设置在所述导入器中时,所述食道定位装置的第二区段的远侧端部与所述导入器的管尖端间隔开。
3.根据权利要求1所述的组件,其中,所述管尖端包括具有软圆形轮廓的硬聚合物尖端,其中,所述尖端结合到所述外管的所述远侧端部。
4.根据权利要求1所述的组件,其中,所述导入器还包括在所述外管的主体内从近侧端部向远侧端部延伸一定距离的一个或更多个内部真空通道,其中所述一个或更多个内部真空通道与所述多个真空孔流体连通以经由所述真空系统向食道壁施加真空。
5.根据权利要求4所述的组件,其中,所述导入器还包括真空端口,所述真空端口包括真空端口主体和真空端口盖,其中真空端口主体包括与所述一个或更多个内部真空通道流体连通的真空管线吊钩,其中所述真空端口主体结合到所述导入器和所述真空端口盖以形成气密密封。
6.根据权利要求1所述的组件,还包括关节运动枢转销,所述关节运动枢转销将第二区段枢转地连接到第一区段,其中,所述导入器还包括多个射线不可透标记物,所述多个射线不可透标记物定位成接近所述关节运动枢转销将驻留在所述导入器内的位置,并且其中所述多个射线不可透标记物从所述位置朝远侧跨越到所述管尖端。
7.根据权利要求1所述的组件,其中,所述导入器还包括多个射线不可透标记物,用于指示所述第二区段的多个方向的运动。
8.根据权利要求1所述的组件,其中,所述多个真空孔沿着所述外管的外表面定位,使得所述多个真空孔的至少一部分跨越所述外管的至少一部分,所述外管的至少一部分被设计成当所述食道定位装置完全接纳在所述导入器内时,覆盖所述食道定位装置的所述第二区段。
9.根据权利要求1所述的组件,其中,所述外管包括多硬度材料,使得所述外管的刚度沿着所述外管的主体变化。
10.根据权利要求1所述的组件,还包括反馈机制,所述反馈机制用于指示在所述组件和食道之间已形成的真空密封的程度。
11.根据权利要求1所述的组件,其中,所述外管还包括超声成像装置。
12.根据权利要求1所述的组件,其中,所述外管还包括光纤光源和相机。
13.根据权利要求1所述的组件,其中,所述第二区段的尺寸被确定成在进行关节运动时时食道壁移位1.5厘米或更多。
14.一种机械食道移位系统,包括根据权利要求30所述的组件。
15.一种机械食道移位系统,包括:
16.根据权利要求15所述的机械食道移位系统,其中,所述食道定位装置还包括手柄,该手柄能够选择性地联接至所述组件和第一区段,以及至少一个关节运动驱动缆线,其中,所述至少一个关节运动驱动缆线使所述第二区段绕第一区段枢转。
17.根据权利要求16所述的机械食道移位系统,其中,所述第二区段包括远侧带防护件和远侧枢轴保持器,其中,所述带中的除了一个带之外的所有带都在所述多个远侧带的远侧端部处具有狭槽,其中所述一个带在所述远侧端部处具有孔而不是狭槽,其中所述远侧带防护件通过穿过所述多个远侧带的销保持所述远侧带组件,并且其中所述远侧防护件具有圆形尖端。
18.根据权利要求15所述的机械食道移位系统,其中,所述导入器还包括在所述外管的主体内从所述近侧端部向所述远侧端部延伸一定距离的一个或更多个内部真空通道,其中,所述一个或更多个内部真空通道与所述多个真空孔流体连通以经由所述真空系统向食道壁施加真空。
19.根据权利要求15所述的机械食道移位系统,其中,当所述食道定位装置设置在所述导入器内时,所述食道定位装置的第二区段的远侧端部与所述导入器的管尖端间隔开。
20.根据权利要求15所述的机械食道移位系统,其中,所述导入器还包括多个射线不可透标记物,用于指示所述第二区段的多个方向的运动。
21.根据权利要求20所述的机械食道移位系统,其中,所述多个远侧带和所述多个近侧带包括聚合物。
22.根据权利要求20所述的机械食道移位系统,其中,所述多个远侧带和所述多个近侧近侧带包括不锈钢。
23.根据权利要求15所述的机械食道移位系统,还包括在所述管尖端处的一个或更多个传感器。
24.根据权利要求15所述的机械食道移位系统,其中,所述外管包括多硬度材料,使得所述外管的刚度沿着所述外管的主体变化。
25.根据权利要求15所述的机械食道移位系统,还包括反馈机制,所述反馈机制用于指示在所述组件和食道之间已形成的真空密封的程度。
26.根据权利要求15所述的机械食道移位系统,其中,所述外管还包括超声成像装置。
27.根据权利要求15所述的机械食道移位系统,其中,所述外管还包括光纤光源和相机。
28.一种使用机械食道移位系统的方法,所述方法包括:
29.根据权利要求28所述的方法,其中,所述导入器还包括在所述外管的主体内从所述近侧端部向所述远侧端部延伸一定距离的一个或更多个内部真空通道,其中,所述一个或更多个内部真空通道与所述多个真空孔流体连通以经由所述真空系统向食道壁施加真空。
30.根据权利要求28所述的方法,其中,当所述食道定位装置设置在所述导入器内时,所述食道定位装置的第二区段的远侧端部与所述导入器的管尖端间隔开。
31.根据权利要求28所述的方法,其中,所述导入器还包括多个射线不可透标记物,用于指示所述第二区段的多个方向的运动。
32.根据权利要求28所述的方法,其中,所述选定角度是45度。
技术总结本公开提供一种与真空系统和食道定位装置一起使用的示例性组件,该示例性组件包括导入器,其中该食道定位装置包括手柄、第一区段、第二区段和关节运动驱动机构。该第一区段联接到该手柄。该第二区段枢转地连接到该第一区段。该关节运动驱动机构被配置为在关节运动时使该第二区段围绕该第一区段枢转。
技术研发人员:维拉尔·M·奥扎,亚当·亨塞尔,埃米尔·达乌德,尼沙基·梅塔
受保护的技术使用者:俄亥俄州国家创新基金会
技术研发日:技术公布日:2025/1/9