一种腹直肌闭合智能机械设备的制作方法
本发明涉及产后修复设备的,更具体地说,涉及一种腹直肌闭合智能机械设备。
背景技术:
1、产后腹直肌的状态通常是由于孕期子宫增大导致两条腹直肌从腹白线位置从左右两侧分开,形成腹直肌分离;腹直肌分离通常的表现为腹部松弛、肌肉力量减弱,外观上呈现一个大肚腩;分离的腹直肌无法提供足够的支撑力,可能会导致腰酸背痛、脏器移位等健康问题,且腹直肌分离后中部留有空隙,寒气和湿气容易侵入人体空隙中,形成畏寒宫寒。
2、目前行业内腹直肌修复的方式有两种方式,一种是通过电极片连通电流刺激增强肌的紧致度,其虽然可以帮助缓解腹直肌分离,但是其修复时间长,效果体现慢,且治疗过程中需要经验十分丰富的医用才能操作;另外一种是通过技术人员手法修复;而每一个技术人员的水平不一样,修复效果也不统一,时好时坏,还容易反弹行业口碑较差。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种腹直肌闭合智能机械设备。
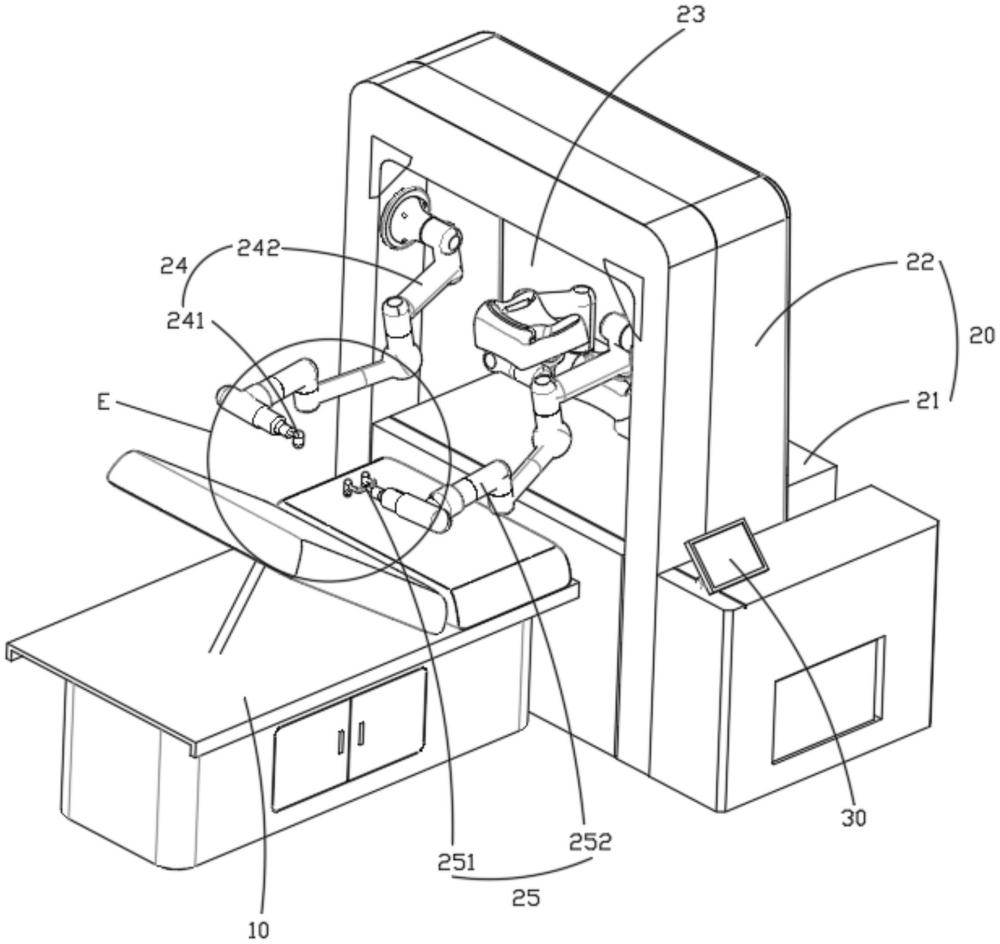
2、本发明解决其技术问题所采用的技术方案是:一种腹直肌闭合智能机械设备,包括床头可角度调节的功能床和智能机械舱,其中,所述智能机械舱包括设置于所述功能床一端的固定箱以及拱门;所述拱门设有供所述功能床以及所述固定箱穿过的通道;所述通道上端的两侧内壁分别设有第一修复机械手和第二修复机械手;所述第一修复机械手包括推拿右侧腹直肌的第一推拿头,以及带动所述第一推拿头上下或左右移动的第一多轴机械臂;所述第二修复机械手包括推拿左侧直腹肌的第二推拿头,以及带动所述第二推拿头上下或左右移动的第二多轴机械臂;所述修复设备还包括控制电脑;所述控制电脑可控制所述第一多轴机械臂与所述第二多轴机械臂分别带动对应的所述第一推拿头与所述第二推拿头自外向内同步推压进行对夹;
3、本发明所述的腹直肌闭合智能机械设备,其中,所述第一推拿头为单指结构,包括竖直设置的第一柱体,以及连接所述第一柱体与所述第一多轴机械臂自由端的第一连接杆;
4、本发明所述的腹直肌闭合智能机械设备,其中,所述第二推拿头均为多指结构,包括多个并排设置并与所述第一柱体平行的第二柱体以及第二连接杆;所述第二连接杆包括与所述第二多轴机械臂相连接的主杆,以及多个与所述第二柱体一一连接的支杆;相邻两所述第二柱体之间形成有供所述第一柱体插入的插接空间;
5、本发明所述的腹直肌闭合智能机械设备,其中,所述第一柱体的底部与所述第二柱体的底部均呈向外凸起的半球形结构;
6、本发明所述的腹直肌闭合智能机械设备,其中,所述第一柱体的直径大于所述第二柱体的直径;
7、本发明所述的腹直肌闭合智能机械设备,其中,所述第一多轴机械臂带动所述第一柱体下压的深度大于所述第二多轴机械臂带动所述第二柱体下压的深度;
8、本发明所述的腹直肌闭合智能机械设备,其中,所述固定箱上表面的左右两侧还设有分别支撑腿部的机械腿托;
9、本发明所述的腹直肌闭合智能机械设备,其中,所述机械腿托包括腿部承托板,以及支撑所述腿部承托板并带动其上下或前后移动的第三多轴机械臂;
10、本发明所述的腹直肌闭合智能机械设备,其中,所述功能床包括床架;所述床架上设有放置于床头处的背垫、设置于背垫与所述固定箱之间的坐垫,以及用于调节所述背垫角度的角度调节组件;
11、本发明所述的腹直肌闭合智能机械设备,其中,所述拱门左右两侧的底部还设有多个滚动脚轮。
12、本发明的有益效果在于:该腹直肌闭合智能机械设备设计巧妙,功能床的床头倾斜设置使人体的头胸屈曲后靠在床上部,并使腿部屈曲进而使人体头胸腹与大腿形成一个完整的u字形,能够使腹直肌由直线状态弯曲成u形状态,上段腹直肌与下段腹直肌全部缩短完全放松,使中间腹直肌分离段,人体呈u形的状态下在用第一修复机械手和第二修复机械手在左右两侧同步相推闭合才能做到肌肉左右两侧肌肉起点和止点肌肉没有过度拉伸形成牵拉,便于后续完成中间腹直肌肌肉分离段的闭合;
13、通过第一推拿头和第二推拿头分别模拟技术人员的双手分别对两分离的腹直肌自外向内方向同步推压形成人类的手指拿捏腹直肌的状态;第一推拿头与第二推拿头对夹在一起时,两腹直肌在外力干预下被推到腹部中心形成闭合,通过第一多轴机械臂和第二多轴机械臂相互配合,可使第一推拿头与所述第二推拿头换位置重复从外侧沿多点位向内推腹直肌,达到完全闭合。
技术特征:
1.一种腹直肌闭合智能机械设备,包括床头可角度调节的功能床和智能机械舱,其特征在于,所述智能机械舱包括设置于所述功能床一端的固定箱以及拱门;所述拱门设有供所述功能床以及所述固定箱穿过的通道;所述通道上端的两侧内壁分别设有第一修复机械手和第二修复机械手;所述第一修复机械手包括推拿右侧腹直肌的第一推拿头,以及带动所述第一推拿头上下或左右移动的第一多轴机械臂;所述第二修复机械手包括推拿左侧直腹肌的第二推拿头,以及带动所述第二推拿头上下或左右移动的第二多轴机械臂;所述修复设备还包括控制电脑;所述控制电脑可控制所述第一多轴机械臂与所述第二多轴机械臂分别带动对应的所述第一推拿头与所述第二推拿头自外向内同步推压进行对夹。
2.根据权利要求1所述的腹直肌闭合智能机械设备,其特征在于,所述第一推拿头为单指结构,包括竖直设置的第一柱体,以及连接所述第一柱体与所述第一多轴机械臂自由端的第一连接杆。
3.根据权利要求2所述的腹直肌闭合智能机械设备,其特征在于,所述第二推拿头均为多指结构,包括多个并排设置并与所述第一柱体平行的第二柱体以及第二连接杆;所述第二连接杆包括与所述第二多轴机械臂相连接的主杆,以及多个与所述第二柱体一一连接的支杆;相邻两所述第二柱体之间形成有供所述第一柱体插入的插接空间。
4.根据权利要求3所述的腹直肌闭合智能机械设备,其特征在于,所述第一柱体的底部与所述第二柱体的底部均呈向外凸起的半球形结构。
5.根据权利要求4所述的腹直肌闭合智能机械设备,其特征在于,所述第一柱体的直径大于所述第二柱体的直径。
6.根据权利要求4或5所述的腹直肌闭合智能机械设备,其特征在于,所述第一多轴机械臂带动所述第一柱体下压的深度大于所述第二多轴机械臂带动所述第二柱体下压的深度。
7.根据权利要求1所述的腹直肌闭合智能机械设备,其特征在于,所述固定箱上表面的左右两侧还设有分别支撑腿部的机械腿托。
8.根据权利要求7所述的腹直肌闭合智能机械设备,其特征在于,所述机械腿托包括腿部承托板,以及支撑所述腿部承托板并带动其上下或前后移动的第三多轴机械臂。
9.根据权利要求1所述的腹直肌闭合智能机械设备,其特征在于,所述功能床包括床架;所述床架上设有放置于床头处的背垫、设置于背垫与所述固定箱之间的坐垫,以及用于调节所述背垫角度的角度调节组件。
10.根据权利要求1-4和6-7任一所述的腹直肌闭合智能机械设备,其特征在于,所述拱门左右两侧的底部还设有多个滚动脚轮。
技术总结
本发明涉及一种腹直肌闭合智能机械设备,包括功能床和智能机械舱;所述智能机械舱包括第一修复机械手和第二修复机械手;第一修复机械手包括第一推拿头以及第一多轴机械臂;第二修复机械手包括第二推拿头以及第二多轴机械臂;第一多轴机械臂与第二多轴机械臂分别带动对应的第一推拿头与第二推拿头自外向内同步推压进行对夹;该腹直肌闭合智能机械设备设计巧妙,第一推拿头与第二推拿头对夹在一起时,两腹直肌在外力干预下被推到腹部中心形成闭合,通过第一多轴机械臂和第二多轴机械臂相互配合,可使第一推拿头与所述第二推拿头换位置重复从外侧沿多点位向内推腹直肌,达到完全闭合。
技术研发人员:赵洪伟,赵子建
受保护的技术使用者:鸿鉴(深圳)健康科技有限公司
技术研发日:
技术公布日:2024/11/18
- 还没有人留言评论。精彩留言会获得点赞!