一种索并联骨折复位机器人
本发明涉及骨科机器人,具体涉及涉及一种索并联骨折复位机器人,属于机器人。
背景技术:
1、作为临床骨科最常见的主要疾病之一,骨折极大威胁了易患人群的身体健康,其中占全身骨折1%-3%的骨盆骨折更是有高达50%-60%的致残率以及13%以上的致死率,而骨折复位则是骨折手术中最主要的环节,低创伤、高精度、高可靠性的复位过程对于手术成功和患者的术后康复非常重要。目前临床上针对骨折复位的传统治疗方法主要分为两种,一种是手法整复夹板外固定术,一种是切开复位钢板内固定术。手法复位优势在于无需切开骨折部位,降低感染概率,但由于无法直观获取骨折信息,该方法对医师要求很高,同时需要较多的复位次数,易造成二次骨折;切开复位由于医师可通过目视或触摸等方式直观获取骨折信息,从而降低了复位次数并提高了复位精准度,但也大大增加了手术过程中感染的可能性。使用骨折复位机器人系统进行骨折手术,选用高精度机械零固件以及伺服控制件,结合基于医学影像的规划导航技术,机器人可以独立完成骨折手术的复位操作,在降低感染风险的同时,大大提高复位过程的精度与可靠性,节省医师体力并减少医师暴露于辐射的时间,有利于高难度骨折手术的推广。
2、骨折复位手术机器人的构型主要由串联、并联以及串并混联三种形式。传统的并联机器人系统具有结构稳定、高刚度、高精度等优点,但其工作空间通常较小,且控制复杂,运动学结算较为复杂。串联机器人虽具有较大的工作空间和较高的灵活度,但其也会占用很大的手术空间,从而使医务人员的操作空间受到限制,而且串联机构的累计误差会导致机器人末端执行器的定位精度降低。混联机器人系统可以在一定程度上综合串联与并联构型的优点,但其工作空间通常仍会受其并联部分限制。在驱动方式上,现有的骨折复位机器人主要采用电机驱动的形式,电机驱动精确度高、响应速度快,调速方便且污染小,但其提供的推力较小,为提高输出转矩,往往需要配备相应的减速器。
3、专利文献cn112370164a,公开了一种空间混联骨盆骨折复位机器人,该机器人主体并联部分采用stewart平台构型,采用弧形导轨与之串联,满足手术要求,但在实际使用中,沿弧形导轨轴线方向上的运动仍受并联平台所限制,同时其中齿轮齿条传动机构也会一定程度上降低其运动精度。
4、专利文献cn104758035a,公开了一种六自由度串并联骨盆骨折复位机器人,该机器人将3自由度直线运动串联平台组件与3自由度旋转运动并联平台组件结合,从而实现6自由度运动。但其串联部分末端与并联部分连接,而并联平台体积较大,较为笨重,无法提供足够刚度。
5、综上,已有的骨折机器人运动空间及承载能力有受限,不能满足手术实际操作需要。
技术实现思路
1、本发明为克服现有技术,提供一种索并联骨折复位机器人,本申请引入人工肌肉驱动,实现了较大的手术操作力,提高了机器人承载能力,可实现机器人的柔性操作。
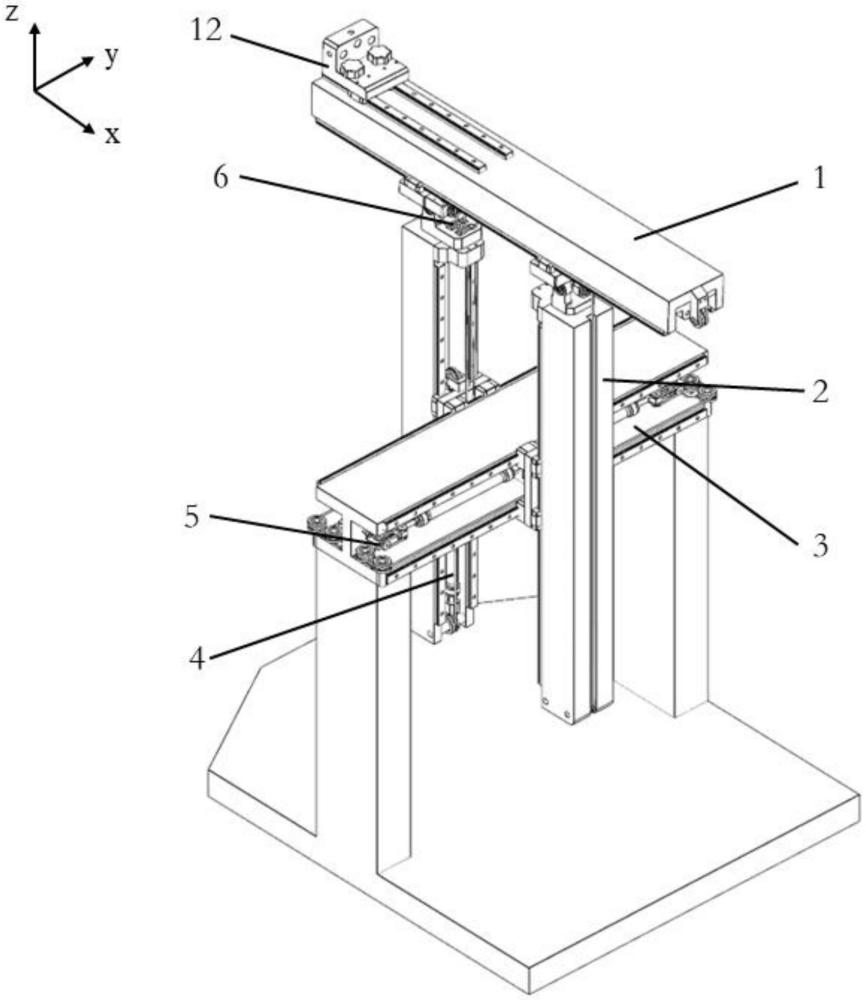
2、一种索并联骨折复位机器人包含包含动平台组件、竖直组件、静平台组件、动平台移动关节驱动机构和竖直组件驱动机构;
3、静平台组件安装于基座,竖直组件可沿自身竖直轴线方向平动,并安装于静平台组件的两侧,动平台组件与两组竖直组件的上端转动连接,竖直组件驱动机构置于静平台组件内,以控制竖直组件沿静平台组件轴线方向的平动,动平台移动关节驱动机构置于竖直组件内,以控制竖直组件向上移动、控制动平台俯仰旋转和沿其轴线方向的平动,动平台阻抗控制机构置于动平台组件内,以控制动平台沿动平台轴线的自旋转,所述自旋转的转轴、俯仰的转轴和竖直轴两两相互垂直。
4、进一步地,所述动平台阻抗控制机构包含动平台气动肌腱、固定座a、增程滑轮组件、固定座b、导向轮和绳索;导向轮安装于手术端球铰,至少两个动平台气动肌腱并列设置于动平台的靠近非手术端球铰的一侧,动平台气动肌腱一端安装于设置在动平台上的固定座a,动平台气动肌腱的另一端与增程滑轮组件相连,增程滑轮组件设置于固定座b,固定座b安装于动平台,绳索的一端安装于固定座b,绳索绕过所述增程滑轮组件和所述导向轮,绳索的另一端定位于手术端球铰。
5、进一步地,所述手术端球铰包含手术端球铰座、球铰衔接架和球铰十字轴组件;
6、手术端球铰座通过球铰十字轴组件与球铰斜街架转动连接,动平台可滑动地设置于球铰斜接架,手术端球铰座可转动地设置于竖直组件,所述导向轮安装于球铰衔接架,所述偏摆导向轮安装于手术端球铰座,绳索绕过所述增程滑轮组件、所述导向轮和所述偏摆导向轮,绳索的另一端定位于手术端球铰。
7、进一步地,所述竖直组件驱动机构包含平动气动肌腱、固定座e、基座内外滑轮组、固定座f和增程滑轮组件;支链转接板组件设置于静平台组件,所述支链转接板组件只能相对静平台组件水平移动,平动气动肌腱的一端安装于固定座e,所述固定座e安装于静平台,平动气动肌腱的另一端与增程滑轮组件相连,增程滑轮组件设置于固定座f,固定座f安装于静平台组件,基座内外滑轮组设置于静平台组件外端,绳索的一端安装于固定座f,绳索绕过增程滑轮组件的增程滑轮组、基座内外滑轮组和竖直支链转接板组件的内侧滑轮,绳索的另一端固定于竖直组件。
8、进一步地,所述竖直组件驱动机构包含平动气动肌腱、固定座e、基座内外滑轮组、固定座f和增程滑轮组件;
9、支链转接板组件设置于静平台组件,所述支链转接板组件只能相对静平台组件水平移动,平动气动肌腱的一端安装于固定座e,所述固定座e安装于静平台组件,平动气动肌腱的另一端与增程滑轮组件相连,增程滑轮组件设置于固定座f,固定座f安装于静平台组件,基座内外滑轮组设置于静平台组件的外端,绳索的一端安装于固定座f,绳索绕过增程滑轮组件的增程滑轮组、基座内外滑轮组和竖直支链转接板组件的内侧滑轮,绳索的另一端固定于竖直组件。
10、本发明相比现有技术的有益效果是:
11、采用人工肌肉驱动,实现大手术操作力,提高机器人承载能力。
12、采用正交型复合结构的并联机器人构型,能够提高机器人控制精度与稳定性。
13、引入索并联的刚柔耦合并联机器人大大提高了工作空间尺度。
14、大工作空间,高承载能力,手术机器人索并联机构构型及具体实现方案;增程滑轮组具有八倍增程滑轮组件。
15、下面结合附图和实施例对本发明的技术方案作进一步地说明:
技术特征:
1.一种索并联骨折复位机器人,其特征在于:包含动平台组件(1)、竖直组件(2)、静平台组件(3)、动平台移动关节驱动机构(4)和竖直组件驱动机构(5);
2.根据权利权利要求1所述一种索并联骨折复位机器人,其特征在于:动平台组件(1)与两组竖直组件(2)的上端转动连接通过手术端球铰(13)和非手术端球铰(14)实现;
3.根据权利要求2所述一种索并联骨折复位机器人,其特征在于:所述动平台阻抗控制机构(6)包含动平台气动肌腱(61)、固定座a(62)、增程滑轮组件(63)、固定座b(64)、导向轮(65)和绳索;
4.根据权利要求3所述一种索并联骨折复位机器人,其特征在于:所述手术端球铰(13)包含手术端球铰座(131)、球铰衔接架(133)和球铰十字轴组件(134);
5.根据权利要求4所述一种索并联骨折复位机器人,其特征在于:所述动平台移动关节驱动机构(4)包含竖直关节气动肌腱(40)、固定座c(41)、固定座d(42)、增程滑轮组件(63)和关节内外侧滑轮组;
6.根据权利要求5所述一种索并联骨折复位机器人,其特征在于:所述竖直组件驱动机构(5)包含平动气动肌腱(50)、固定座e(51)、基座内外滑轮组、固定座f(54)和增程滑轮组件(63);
7.根据权利要求3所述一种索并联骨折复位机器人,其特征在于:所述增程滑轮组件(63)包含动滑轮座(631)、增程导向轮(632)和定滑轮座(633);动滑轮座(631)和定滑轮座(633)上分别设置四个增程导向轮(632),八个增程导向轮(632)上绕有绳索,定滑轮座(633)安装于动平台(11),动平台气动肌腱(61)的另一端与动滑轮座(631)相连。
8.根据权利要求5所述一种索并联骨折复位机器人,其特征在于:所述增程滑轮组件(63)包含动滑轮座(631)、增程导向轮(632)和定滑轮座(633);动滑轮座(631)和定滑轮座(633)上分别设置四个增程导向轮(632),八个增程导向轮(632)上绕有绳索,定滑轮座(633)安装于竖直组件(2),竖直关节气动肌腱(40)的另一端与动滑轮座(631)相连。
9.根据权利要求6所述一种索并联骨折复位机器人,其特征在于:所述增程滑轮组件(63)包含动滑轮座(631)、增程导向轮(632)和定滑轮座(633);动滑轮座(631)和定滑轮座(633)上分别设置四个增程导向轮(632),八个增程导向轮(632)上绕有绳索,定滑轮座(633)安装于静平台组件(3),动平台气动肌腱(61)的另一端与动滑轮座(631)相连。
10.根据权利要求1所述一种索并联骨折复位机器人,其特征在于:所述动平台组件(1、)竖直组件(2)和静平台组件(3)的数量配置方式为:
技术总结
一种索并联骨折复位机器人,属于机器人技术领域,静平台组件安装于基座上方,竖直组件安装于静平台组件两侧,可沿静平台横向、竖向平动,动平台组件与两组竖直组件上端通过球副活动连接,竖直组件驱动机构置于静平台组件内,以控制竖直组件的移动,动平台移动关节驱动机构置于竖直组件内,以控制竖直组件向上移动,以及控制动平台沿其轴线方向的平动,动平台阻抗控制机构置于动平台组件内,以控制动平台沿其轴线的自旋转,所述自旋转的转轴、俯仰的转轴和竖直轴两两相互垂直,构建为双支路六自由度的并联结构。本申请在并联结构的基础上引入人工肌肉驱动,实现高精度手术操作的同时,实现兼顾高负载与高柔顺性的手术操作控制。
技术研发人员:于洪健,沈祥宇,郭子嘉,杜志江,孙立宁,陈旸
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/12/5
- 还没有人留言评论。精彩留言会获得点赞!