一种下肢康复外骨骼机器人
本发明涉及外骨骼机器人,尤其涉及一种下肢康复外骨骼机器人。
背景技术:
1、随着医疗技术与康复工程的不断进步,下肢康复外骨骼机器人已成为辅助行走、促进患者下肢功能恢复的重要工具。这类机器人通过精密的机械结构、先进的传感技术与智能控制算法,为下肢运动障碍患者提供了重新站立和行走的可能,极大地提高了他们的生活质量和康复效率,如ct ugo/程天悠行下肢外骨骼康复机器人。
2、该下肢外骨骼康复机器人主要包括连接主体、升降机构、控制端、胸部固定带、下肢外骨骼传动结构、固定带、移动支撑架和脚架组成,通过控制端控制升降机构将下肢外骨骼传动结构下降,使脚架与地面接触,再将患者扶上脚架,通过固定带和胸部固定带进行下肢外骨骼传动结构的穿戴,穿戴完成后,通过控制器控制下肢外骨骼传动结构进行步行运动动作,机器人通过设置下肢髋、膝关节的角度,模拟维持步行时的关节角度,从而充分训练患者的伸髋伸膝、屈髋屈膝功能,以及髋关节膝关节运动的同步性,实现下肢引导,加快下肢康复,其原理为依据“神经可塑性”原理设计,旨在通过外部设备带动下肢进行康复训练,刺激神经系统重塑,提升下肢自主行走能力。
3、然而,在实际应用过程中,上述下肢康复外骨骼机器人在户外或复杂环境中使用时,地面往往存在各种障碍物,如碎石、不平整的路面等,这些不仅影响机器人的稳定行走,还可能对使用者构成安全隐患,导致磕碰甚至摔倒,严重阻碍了康复进程的顺利进行。
4、因此,需要收设计一种能够有效解决上述问题,提高行走安全性、智能感知能力及清理效率的下肢康复外骨骼机器人来解决问题。
技术实现思路
1、本发明提供一种下肢康复外骨骼机器人,解决了上述提出的技术问题。
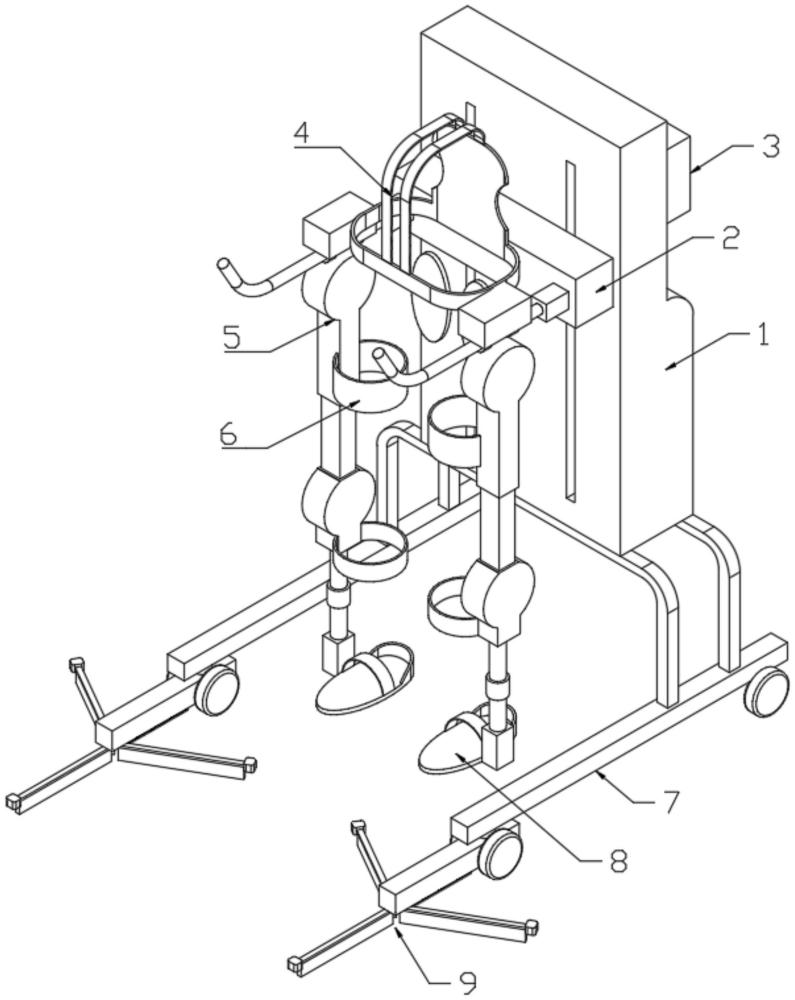
2、为解决上述技术问题,本发明提供的一种下肢康复外骨骼机器人,包括连接主体,连接主体背面固定安装有控制端,连接主体正面传动连接有升降机构,升降机构上部固定安装有胸部固定带,升降机构下部对称传动连接有两个下肢外骨骼传动结构,两个所述下肢外骨骼传动结构底部均传动安装有脚架,两个所述下肢外骨骼传动结构上下固定连接有固定带,所述连接主体底部固定有支撑架,且支撑架前部固定有清理检测装置,所述清理检测装置包括固定安装在支撑架前部两侧的移动清理机构,两个所述移动清理机构对称安装,并相互配合传动清理;
3、所述移动清理机构包括连接方管,连接方管顶后部固定有旋转轴,通过旋转轴与支撑架转动连接,连接方管后部通过转轴连接有移动轮,移动轮通过转轴传动连接有联动结构,联动结构设置在连接方管内部,连接方管底部转动连接有旋转清理结构,旋转清理结构与联动结构传动连接,连接方管底部固定有梳理结构
4、进一步,所述联动结构包括固定在移动轮转轴上的传动齿轮一、转轴转动安装在连接方管内壁的双齿轮和伞齿轮一,所述传动齿轮一与双齿轮之间传动连接有传动链条,所述伞齿轮一背面固定有传动齿轮二,传动齿轮二与双齿轮传动连接,伞齿轮一与清拨机构传动连接。
5、进一步,所述两个移动清理机构的的联动结构不同,其中一个联动机构包括传动齿轮一、传动链条、伞齿轮一和传动齿轮二组成,传动齿轮一通过传动链条与传动齿轮二传动连接。
6、进一步,所述旋转清理结构包括旋转连接在连接方管内部的连接轴,所述连接轴上部固定有伞齿轮二,伞齿轮二与伞齿轮一九十度传动啮合,连接轴底部贯穿连接方管,并固定连接有旋转座,旋转座外部固定连接有多个清拨机构。
7、进一步,所述清拨机构包括与旋转座固定连接的拨杆,拨杆底部固定有清理毛刷,拨杆对外端固定有测距传感器。
8、进一步,所述测距传感器与控制端电性连接。
9、进一步,所述梳理结构包括固定在连接方管底部的直角板,直角板内上端固定有多个梳齿。
10、进一步,所述直角板上的多个梳齿与清理毛刷配合使用。
11、与相关技术相比较,本发明提供的一种下肢康复外骨骼机器人具有如下有益效果:
12、本发明提供,清理检测装置由两个移动清理机构组成,向前移动时连接方管上的移动轮逆时针滚动,带动联动结构,联动结构带动旋转清理结构逆时针旋转,另一移动清理机构通过联动结构带动旋转清理结构逆时针旋转,将装置前方道路上的碎石清理到两边,使其康复移动过程中不易与碎石磕碰,提高移动安全性。
13、本发明提供,每个拨杆前端均安装测距传感器,用于检测地面高度将信号发送给控制端,当多个测距传感器检测地面高度差较大时,控制端将信号处理分析,得出前方地面坑洼情况,控制下肢外骨骼传动结构停止工作,防止出现摔倒情况。
14、本发明提供,连接方管底部安装梳理结构,每个拨杆旋转过程中经过直角板内部,清理毛刷与多个梳齿接触,将清理毛刷中卷入的碎石和垃圾碎片梳出,保持清理毛刷整齐,防止出现打结。
技术特征:
1.一种下肢康复外骨骼机器人,包括连接主体(1),连接主体(1)背面固定安装有控制端(3),连接主体(1)正面传动连接有升降机构(2),升降机构(2)上部固定安装有胸部固定带(4),升降机构(2)下部对称传动连接有两个下肢外骨骼传动结构(5),两个所述下肢外骨骼传动结构(5)底部均传动安装有脚架(8),两个所述下肢外骨骼传动结构(5)上下固定连接有固定带(6),其特征在于:所述连接主体(1)底部固定有支撑架(7),且支撑架(7)前部固定有清理检测装置(9),所述清理检测装置(9)包括固定安装在支撑架(7)前部两侧的移动清理机构,两个所述移动清理机构对称安装,并相互配合传动清理;
2.根据权利要求1所述的一种下肢康复外骨骼机器人,其特征在于,所述联动结构包括固定在移动轮(92)转轴上的传动齿轮一(921)、转轴转动安装在连接方管(91)内壁的双齿轮(924)和伞齿轮一(923),所述传动齿轮一(921)与双齿轮(924)之间传动连接有传动链条(922),所述伞齿轮一(923)背面固定有传动齿轮二(9231),传动齿轮二(9231)与双齿轮(924)传动连接,伞齿轮一(923)与清拨机构(933)传动连接。
3.根据权利要求2所述的一种下肢康复外骨骼机器人,其特征在于,所述两个移动清理机构的的联动结构不同,其中一个联动机构包括传动齿轮一(921)、传动链条(922)、伞齿轮一(923)和传动齿轮二(9231)组成,传动齿轮一(921)通过传动链条(922)与传动齿轮二(9231)传动连接。
4.根据权利要求1所述的一种下肢康复外骨骼机器人,其特征在于,所述旋转清理结构(93)包括旋转连接在连接方管(91)内部的连接轴(931),所述连接轴(931)上部固定有伞齿轮二(932),伞齿轮二(932)与伞齿轮一(923)九十度传动啮合,连接轴(931)底部贯穿连接方管(91),并固定连接有旋转座,旋转座外部固定连接有多个清拨机构(933)。
5.根据权利要求4所述的一种下肢康复外骨骼机器人,其特征在于,所述清拨机构(933)包括与旋转座固定连接的拨杆(9331),拨杆(9331)底部固定有清理毛刷(9333),拨杆(9331)对外端固定有测距传感器(9332)。
6.根据权利要求5所述的一种下肢康复外骨骼机器人,其特征在于,所述测距传感器(9332)与控制端(3)电性连接。
7.根据权利要求1所述的一种下肢康复外骨骼机器人,其特征在于,所述梳理结构(94)包括固定在连接方管(91)底部的直角板(941),直角板(941)内上端固定有多个梳齿(942)。
8.根据权利要求6所述的一种下肢康复外骨骼机器人,其特征在于,所述直角板(941)上的多个梳齿(942)与清理毛刷(9333)配合使用。
技术总结
本发明公开了一种下肢康复外骨骼机器人,涉及外骨骼机器人技术领域,包括连接主体,所述连接主体底部固定有支撑架,且支撑架前部固定有清理检测装置,所述清理检测装置包括固定安装在支撑架前部两侧的移动清理机构,两个所述移动清理机构对称安装,并相互配合传动清理;本发明提供,清理检测装置由两个移动清理机构组成,向前移动时连接方管上的移动轮逆时针滚动,带动联动结构,联动结构带动旋转清理结构逆时针旋转,另一移动清理机构通过联动结构带动旋转清理结构逆时针旋转,将装置前方道路上的碎石清理到两边,使其康复移动过程中不易与碎石磕碰,提高移动安全性。
技术研发人员:纪佳序,杨潇
受保护的技术使用者:河北工业大学
技术研发日:
技术公布日:2025/1/28
- 还没有人留言评论。精彩留言会获得点赞!