一种基于梯形储能气囊的气动上肢康复外骨骼
本发明涉及外骨骼机器人,尤其是涉及一种基于梯形储能气囊的气动上肢康复外骨骼。
背景技术:
1、近年来,柔性机器人技术在国内外外骨骼机器人上的应用得到广泛发展,上肢康复外骨骼是一种用于辅助上肢运动功能障碍患者进行康复训练的设备。气动上肢康复外骨骼使用气动肌肉执行器(pneumatic muscle actuators,pma)作为动力来源,这些执行器通过压缩空气产生力量,驱动外骨骼进行运动。气动肌肉执行器具有重量轻、易于控制、成本相对较低等优点,这使得它们在康复外骨骼领域中非常受欢迎。但在实际应用中气动上肢康复外骨骼仍存在驱动力不足、控制复杂和结构与人体匹配度不够等问题。因此,本领域的技术人员致力于提供基于梯形储能气囊的气动上肢康复外骨骼,为穿戴者提供肩肘腕关节运动助力。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的等缺陷而提供一种基于梯形储能气囊的气动上肢康复外骨骼,气动驱动器中的梯形储能气囊采用仿生学设计,模拟上肢肌肉辅助肩、肘、腕关节运动,可实现的上肢运动更为灵活,与人体上肢相匹配,避免患者穿戴不适或二次伤害。
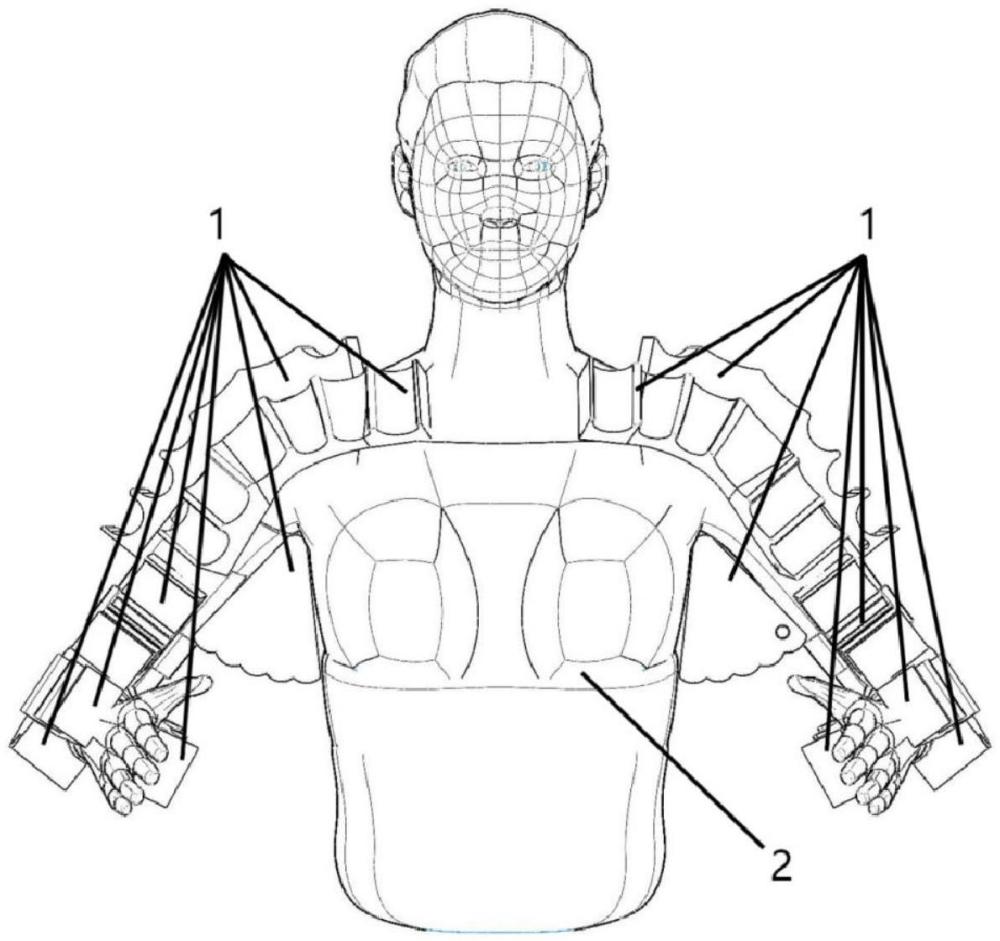
2、本发明提供一种基于梯形储能气囊的气动上肢康复外骨骼,包括:肩肘腕关节驱动器、柔性外骨骼服和连接组件;
3、所述肩肘腕关节驱动器包括:肩关节驱动器、肘关节驱动器和腕关节驱动器;所述肩关节驱动器包括:肩关节前屈驱动器、肩关节后伸驱动器、肩关节外展驱动器以及肩关节内收驱动器,所述肘关节驱动器包括:肘关节前屈驱动器和肘关节后伸驱动器,所述腕关节驱动器包括:腕关节前屈驱动器和腕关节后伸驱动器;所述肩肘腕关节驱动器由数个梯形储能气囊组成;
4、所述柔性外骨骼服用于连接肩肘腕关节驱动器与人体上肢,固定肩肘腕关节驱动器的位置;
5、所述连接组件用于连接肩肘腕关节驱动器与柔性外骨骼服。
6、进一步的,所述连接组件由毛刺粘胶以及魔术贴绑带组成;所述毛刺粘胶的绒面与肩肘腕关节驱动器的背部连接,所述毛刺粘胶的钩面与柔性外骨骼服连接,所述魔术贴绑带穿过气动驱动器并绑缚在人体上肢相应位置。
7、进一步的,所述肩肘腕关节驱动器通过连接组件固定在所述柔性外骨骼服的相应位置;所述肩关节前屈驱动器置于上臂前侧,平行于冠状面;所述肩关节后伸驱动器置于上臂后侧,平行于冠状面;所述肩关节外展驱动器置于肩关节外侧,平行于矢状面;所述肩关节外展驱动器置于腋下,平行于矢状面。
8、进一步的,所述肘关节前屈驱动器置于肘关节内侧,所述肘关节后伸驱动器置于肘关节外侧,所述腕关节前屈驱动器置于腕关节内侧,所述腕关节前屈驱动器置于腕关节外侧。
9、进一步的,所述肩肘腕关节驱动器为符合人体肩肘腕三关节结构和长度的气动驱动器,气动驱动器由数个梯形储能气囊连接而成,所述梯形储能气囊的侧面重合通过胶水连接,底面与底层塑料薄膜通过胶水连接,相邻梯形储能气囊紧密排列,所述底层塑料膜的长度等于单个梯形储能气囊底面长度与梯形储能气囊数量的乘积。所述底层塑料膜通过双面胶与毛刺粘胶的绒面连接。
10、进一步的,所述梯形储能气囊是一种可变形的立体梯形结构,当梯形储能气囊内部气压达到最大值时,梯形储能气囊为立体梯形;气动驱动器由数个梯形储能气囊连接而成,所述梯形储能气囊侧面中间位置设有用于连接左右气囊的圆形孔洞,所述气动驱动器首尾两个气囊的侧面仅有一个圆形孔洞,所述气动驱动器尾部设有气源通气口,用于连接气管从而连接气源。
11、进一步的,所述梯形储能气囊的制作材料为0.1mm厚的热塑性聚氨酯tpu织物,具有柔软性、轻质性和高抗疲劳性能。
12、进一步的,所述梯形储能气囊通过热压密封形成单个梯形体气室,在单个气囊侧面中心位置设有圆形通气孔,形成连通气室。
13、进一步的,所述梯形储能气囊通过连接气源改变气囊内部气压,使气囊发生形变从而产生压力,模拟人体肌肉辅助关节运动。当气囊内部的气压达到最大值时,整个驱动器所产生的弯曲角度最大。
14、进一步的,所述气动驱动器的弯曲角度的参数计算包括以下步骤:
15、s1、梯形储能气囊的气压达到最大值时,整个驱动器所产生弯曲角度最大;设气囊膨胀状态下,相邻两个梯形储能气囊中前一个气囊的短边延长线与后一个气囊的短边的夹角为θn,当气囊的数量n为2时,整个驱动器所产生的最大弯曲角度为θ1;当n为3时,整个驱动器所产生的最大弯曲角度为θ1+θ2;以此类推,当驱动器有n个梯形储能气囊时,其能够产生的最大弯曲角度为:
16、
17、s2、在理想条件下,当每个梯形储能气囊达到其最大内部压力时,每个梯形储能气囊的形状保持均匀。因此,每对相邻梯形储能气囊之间的角度是一致的,则:
18、θsum=(n-1)θ1;
19、s3、设单袋的短边为as,长边为al,高为h,短边的底角为则:
20、
21、s4、由s3可以得到第一个最大弯曲角度θ1为:
22、
23、s5、由s4类推,当驱动器中的梯形储能气囊数为n时,驱动器的最大弯曲角度值为:
24、
25、与现有技术相比,本发明具有以下优点:
26、(1)本发明提供的气动上肢外骨骼,气动驱动器中的梯形储能气囊采用仿生学设计,模拟上肢肌肉辅助肩、肘、腕关节运动。
27、(2)本发明提供的气动上肢外骨骼,肩肘腕关节驱动器包括的8个驱动器均设有单独的气源通道,因此每个气动驱动器都可以被单独驱动,使得本发明可实现的上肢运动更为灵活。
28、(3)本发明提供的气动上肢外骨骼,肩肘腕关节驱动器分别为符合人体肩肘腕三关节结构和长度的气动驱动器,与人体上肢相匹配,避免患者穿戴不适或二次伤害。
技术特征:
1.一种基于梯形储能气囊的气动上肢康复外骨骼,其特征在于,包括:肩肘腕关节驱动器(1)、柔性外骨骼服(2)和连接组件;
2.根据权利要求1所述的一种基于梯形储能气囊的气动上肢康复外骨骼,其特征在于,所述连接组件由毛刺粘胶以及魔术贴绑带组成;所述毛刺粘胶的绒面与肩肘腕关节驱动器(1)的背部连接,所述毛刺粘胶的钩面与柔性外骨骼服(2)连接,所述魔术贴绑带穿过气动驱动器并绑缚在人体上肢相应位置。
3.根据权利要求1所述的一种基于梯形储能气囊的气动上肢康复外骨骼,其特征在于,所述肩肘腕关节驱动器(1)通过连接组件固定在所述柔性外骨骼服(2)的相应位置;所述肩关节前屈驱动器(100)置于上臂前侧,平行于冠状面;所述肩关节后伸驱动器(101)置于上臂后侧,平行于冠状面;所述肩关节外展驱动器(102)置于肩关节外侧,平行于矢状面;所述肩关节外展驱动器(103)置于腋下,平行于矢状面。
4.根据权利要求1所述的一种基于梯形储能气囊的气动上肢康复外骨骼,其特征在于,所述肘关节前屈驱动器(104)置于肘关节内侧,所述肘关节后伸驱动器(105)置于肘关节外侧,所述腕关节前屈驱动器(106)置于腕关节内侧,所述腕关节前屈驱动器(107)置于腕关节外侧。
5.根据权利要求1所述的一种基于梯形储能气囊的气动上肢康复外骨骼,其特征在于,所述肩肘腕关节驱动器(1)为符合人体肩肘腕三关节结构和长度的气动驱动器,气动驱动器由数个梯形储能气囊(110)连接而成,所述梯形储能气囊(110)的侧面重合通过胶水连接,底面与底层塑料薄膜(1001)通过胶水连接,相邻梯形储能气囊(110)紧密排列,所述底层塑料膜(1001)的长度等于单个梯形储能气囊(110)底面长度与梯形储能气囊(110)数量的乘积。
6.根据权利要求5所述的一种基于梯形储能气囊的气动上肢康复外骨骼,其特征在于,所述梯形储能气囊(110)是一种可变形的立体梯形结构,当梯形储能气囊(110)内部气压达到最大值时,梯形储能气囊(110)为立体梯形;气动驱动器由数个梯形储能气囊(110)连接而成,所述梯形储能气囊(110)侧面中间位置设有用于连接左右气囊的圆形孔洞,所述气动驱动器首尾两个气囊的侧面仅有一个圆形孔洞,所述气动驱动器尾部设有气源通气口(1103),用于连接气管从而连接气源。
7.根据权利要求5所述的一种基于梯形储能气囊的气动上肢康复外骨骼,其特征在于,所述梯形储能气囊(110)的制作材料为0.1mm厚的热塑性聚氨酯tpu织物,具有柔软性、轻质性和高抗疲劳性能。
8.根据权利要求5所述的一种基于梯形储能气囊的气动上肢康复外骨骼,其特征在于,所述梯形储能气囊(110)通过热压密封形成单个梯形体气室,在单个气囊侧面中心位置设有圆形通气孔,形成连通气室。
9.根据权利要求5所述的一种基于梯形储能气囊的气动上肢康复外骨骼,其特征在于,所述梯形储能气囊(110)通过连接气源改变气囊内部气压,使气囊发生形变从而产生压力,模拟人体肌肉辅助关节运动。
10.根据权利要求5所述的一种基于梯形储能气囊的气动上肢康复外骨骼,其特征在于,所述气动驱动器的弯曲角度的参数计算包括以下步骤:
技术总结
本发明涉及一种基于梯形储能气囊的气动上肢康复外骨骼,包括:肩肘腕关节驱动器、柔性外骨骼服和连接组件;肩肘腕关节驱动器包括:肩关节驱动器、肘关节驱动器和腕关节驱动器;肩关节驱动器包括:肩关节前屈驱动器、肩关节后伸驱动器、肩关节外展驱动器以及肩关节内收驱动器,肘关节驱动器包括:肘关节前屈驱动器和肘关节后伸驱动器,腕关节驱动器包括:腕关节前屈驱动器和腕关节后伸驱动器;肩肘腕关节驱动器由数个梯形储能气囊组成;柔性外骨骼服用于连接肩肘腕关节驱动器与人体上肢,固定肩肘腕关节驱动器的位置。与现有技术相比,本发明气动驱动器中的梯形储能气囊可使上肢运动更为灵活,与人体上肢相匹配,避免患者穿戴不适或二次伤害。
技术研发人员:孟巧玲,邓淞苧,许蓉娜,吴焕森,喻洪流
受保护的技术使用者:上海理工大学
技术研发日:
技术公布日:2025/1/28
- 还没有人留言评论。精彩留言会获得点赞!