一种防止压伤的手康复机器人及其操作方法
本发明涉及手康复机器人,具体为一种防止压伤的手康复机器人及其操作方法。
背景技术:
1、目前市场上中风导致的手功能障碍患者缺乏康复设备,大约75%脑卒中者在发病后会留下不同程度的后遗症,在众多的后遗症中,以偏瘫发生率最高,在偏瘫的康复中,又以手功能的康复最为困难,临床上存在将手固定在一个固定的位置上,因而常致使淤积于关节内肌腱周围的淤血形成纤维变性,手部康复机器人是一种帮助患者康复训练的穿戴式设备,为了提高手功能障碍患者的训练效率,需要用到一种手康复机器人,但是现有手康复机器人依然存在以下不足:
2、如公开号为cn218572493u的发明公开了手功能康复机器人,该发明能够使实现智能控制,能够实现配套训练软件对手指进行训练,且能够实现患者五指单独地运动、全指运动、分指运动、镜像运动等多种训练方式,以及能够准确获取患者有意向运动的信号,通过屏幕来显示运动信息,角度、力度力量等信息,以及能够把患者康复数据汇总、生成评估报告,但类似于上述申请的对比文件,在手康复机器人进行使用时,由于多数手康复机器人不能根据使用者手指的大小来适配手康复机器人的尺寸,致使手康复机器人带动患者手指进行运动时易压伤患者的手部,造成手康复机器人实用性下降且使用效率降低的问题出现。
3、于是,有鉴于此,针对现有的结构及缺失予以研究改良,提出一种防止压伤的手康复机器人及其操作方法。
技术实现思路
1、本发明的目的在于提供一种防止压伤的手康复机器人及其操作方法,以解决上述背景技术中提出的问题。
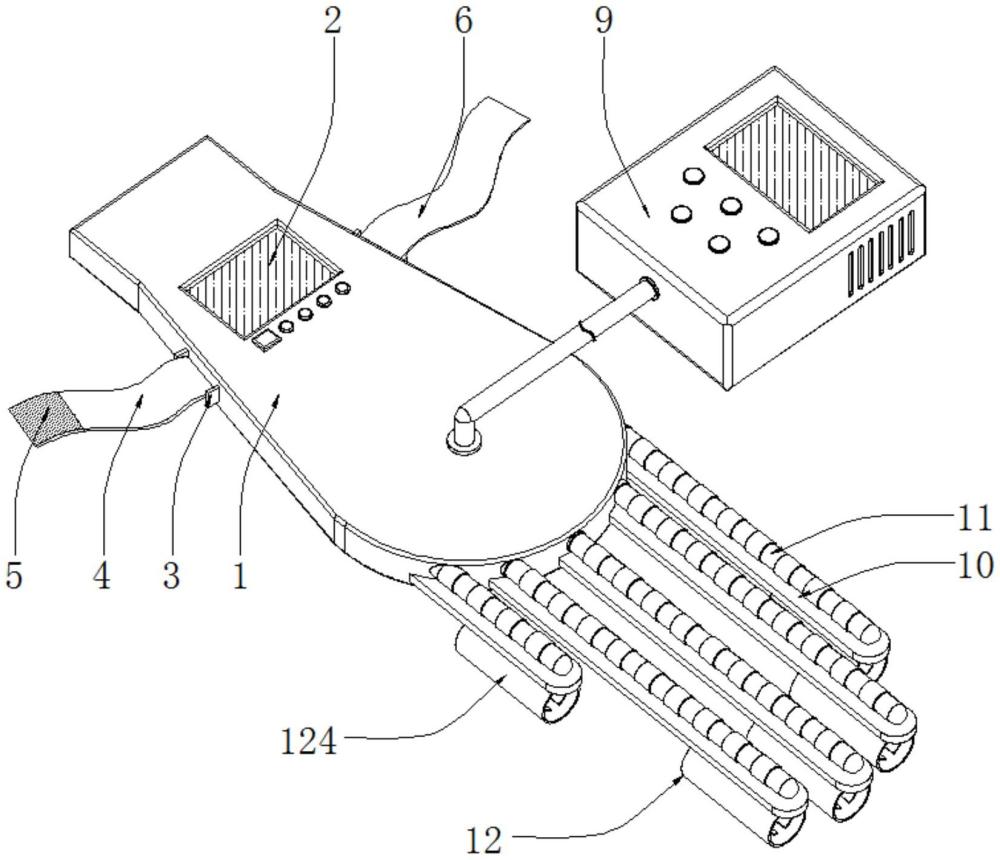
2、为实现上述目的,本发明提供如下技术方案:一种防止压伤的手康复机器人,包括主架体和限位组件,所述主架体上端后侧设置有控制面板,所述主架体前端外侧增设有柔性安装板,且柔性安装板上端设置有训练弯曲气管,所述柔性安装板下端设置有限位组件,且限位组件包括固定块、安装滑槽、安装滑块、限位环、弹簧阻尼杆和夹持环,所述固定块内部下端开设有安装滑槽,且安装滑槽内部连接有安装滑块,并且安装滑块下端设置有限位环,同时限位环内部两侧增设有弹簧阻尼杆,所述弹簧阻尼杆前端设置有夹持环。
3、进一步的,所述主架体外部两侧安装有安装块,并且安装块内侧设置有第一佩戴带,同时第一佩戴带前端上方增设有魔术贴毛面,所述主架体外部右侧设置有第二佩戴带,且第二佩戴带前端下方增设有魔术贴勾面。
4、进一步的,所述第一佩戴带外侧与主架体外侧呈水平状分布,且第一佩戴带通过安装块与主架体相连接。
5、进一步的,所述第一佩戴带外侧与魔术贴毛面外侧呈水平状分布,且第一佩戴带外侧与魔术贴毛面外侧紧密贴合。
6、进一步的,所述主架体上端前侧连接有连接导管,且连接导管前端连接有气泵电机。
7、进一步的,所述安装滑槽内部尺寸与安装滑块外部尺寸相适配,且安装滑块通过安装滑槽与固定块滑动连接。
8、进一步的,所述夹持环与限位环呈嵌入式连接,其夹持环通过弹簧阻尼杆与限位环弹性连接。
9、进一步的,所述夹持环的数量设置有两个,且两个所述夹持环以限位环的正面中轴线对称设置于限位环内部两侧。
10、进一步的,一种防止压伤的手康复机器人的操作方法,应用于所述的一种防止压伤的手康复机器人,其操作方法如下:首先通过主架体上端设置的控制面板对手康复机器人的使用进行调节,通过安装块将第一佩戴带固定安装在主架体外部左侧,并将魔术贴毛面安装在第一佩戴带前端上方,同时将第二佩戴带固定安装在主架体外部右侧,并将魔术贴勾面固定安装在第二佩戴带前端下方,在使用者将主架体与手部对接后,顺势将第一佩戴带与第二佩戴带缠绕手腕,并通过魔术贴毛面与魔术贴勾面使得手康复机器人与使用者手腕进行佩戴,接着,通过连接导管将气泵电机与主架体相连接,气泵电机作业使得柔性安装板上端设置的训练弯曲气管随之运动,通过紧固螺栓将固定块固定安装在柔性安装板下端前侧,通过安装滑块配合安装滑槽将限位环滑动安装在固定块下端,将弹簧阻尼杆固定安装在限位环内部两侧,并将夹持环固定安装在弹簧阻尼杆前端,利用弹簧阻尼杆使得夹持环与限位环弹性连接,将手指放在限位环内部,并通过夹持环将手指进行夹持,使得训练弯曲气管带动柔性安装板运动时,手指能够在限位环中具备活动空间。
11、本发明提供了一种防止压伤的手康复机器人及其操作方法,具备以下有益效果:
12、1、本发明通过第一佩戴带的设置,能够在防止压伤的手康复机器人及其操作方法使用时,通过安装块将第一佩戴带固定安装在主架体外部左侧,并将魔术贴毛面安装在第一佩戴带前端上方,同时将第二佩戴带固定安装在主架体外部右侧,并将魔术贴勾面固定安装在第二佩戴带前端下方,在使用者将主架体与手部对接后,顺势将第一佩戴带与第二佩戴带缠绕手腕,并通过魔术贴毛面与魔术贴勾面使得手康复机器人与使用者手腕进行佩戴,使得手康复机器人的使用相对便捷,提升手康复机器人使用过程中的实用性与使用效率。
13、2、本发明通过限位组件的设置,能够在防止压伤的手康复机器人及其操作方法使用时,通过连接导管将气泵电机与主架体相连接,气泵电机作业使得柔性安装板上端设置的训练弯曲气管随之运动,通过紧固螺栓将固定块固定安装在柔性安装板下端前侧,通过安装滑块配合安装滑槽将限位环滑动安装在固定块下端,利用弹簧阻尼杆使得夹持环与限位环弹性连接,将手指放在限位环内部,并通过夹持环将手指进行夹持,使得训练弯曲气管带动柔性安装板运动时,手指能够在限位环中具备一定的活动空间,从而避免对手指的挤压,提升手康复机器人整体使用效率。
技术特征:
1.一种防止压伤的手康复机器人,包括主架体(1)和限位组件(12),其特征在于,所述主架体(1)上端后侧设置有控制面板(2),所述主架体(1)前端外侧增设有柔性安装板(10),且柔性安装板(10)上端设置有训练弯曲气管(11),所述柔性安装板(10)下端设置有限位组件(12),且限位组件(12)包括固定块(121)、安装滑槽(122)、安装滑块(123)、限位环(124)、弹簧阻尼杆(125)和夹持环(126),所述固定块(121)内部下端开设有安装滑槽(122),且安装滑槽(122)内部连接有安装滑块(123),并且安装滑块(123)下端设置有限位环(124),同时限位环(124)内部两侧增设有弹簧阻尼杆(125),所述弹簧阻尼杆(125)前端设置有夹持环(126)。
2.根据权利要求1所述的一种防止压伤的手康复机器人,其特征在于,所述主架体(1)外部两侧安装有安装块(3),并且安装块(3)内侧设置有第一佩戴带(4),同时第一佩戴带(4)前端上方增设有魔术贴毛面(5),所述主架体(1)外部右侧设置有第二佩戴带(6),且第二佩戴带(6)前端下方增设有魔术贴勾面(7)。
3.根据权利要求2所述的一种防止压伤的手康复机器人,其特征在于,所述第一佩戴带(4)外侧与主架体(1)外侧呈水平状分布,且第一佩戴带(4)通过安装块(3)与主架体(1)相连接。
4.根据权利要求3所述的一种防止压伤的手康复机器人,其特征在于,所述第一佩戴带(4)外侧与魔术贴毛面(5)外侧呈水平状分布,且第一佩戴带(4)外侧与魔术贴毛面(5)外侧紧密贴合。
5.根据权利要求4所述的一种防止压伤的手康复机器人,其特征在于,所述主架体(1)上端前侧连接有连接导管(8),且连接导管(8)前端连接有气泵电机(9)。
6.根据权利要求5所述的一种防止压伤的手康复机器人,其特征在于,所述安装滑槽(122)内部尺寸与安装滑块(123)外部尺寸相适配,且安装滑块(123)通过安装滑槽(122)与固定块(121)滑动连接。
7.根据权利要求6所述的一种防止压伤的手康复机器人,其特征在于,所述夹持环(126)与限位环(124)呈嵌入式连接,其夹持环(126)通过弹簧阻尼杆(125)与限位环(124)弹性连接。
8.根据权利要求7所述的一种防止压伤的手康复机器人,其特征在于,所述夹持环(126)的数量设置有两个。
9.根据权利要求8所述的一种防止压伤的手康复机器人,其特征在于,两个所述夹持环(126)以限位环(124)的正面中轴线对称设置于限位环(124)内部两侧。
10.一种防止压伤的手康复机器人的操作方法,应用于权利要求9所述的一种防止压伤的手康复机器人,其特征在于,其操作方法如下:首先通过主架体(1)上端设置的控制面板(2)对手康复机器人的使用进行调节,通过安装块(3)将第一佩戴带(4)固定安装在主架体(1)外部左侧,并将魔术贴毛面(5)安装在第一佩戴带(4)前端上方,同时将第二佩戴带(6)固定安装在主架体(1)外部右侧,并将魔术贴勾面(7)固定安装在第二佩戴带(6)前端下方,在使用者将主架体(1)与手部对接后,顺势将第一佩戴带(4)与第二佩戴带(6)缠绕手腕,并通过魔术贴毛面(5)与魔术贴勾面(7)使得手康复机器人与使用者手腕进行佩戴,接着,通过连接导管(8)将气泵电机(9)与主架体(1)相连接,气泵电机(9)作业使得柔性安装板(10)上端设置的训练弯曲气管(11)随之运动,通过紧固螺栓将固定块(121)固定安装在柔性安装板(10)下端前侧,通过安装滑块(123)配合安装滑槽(122)将限位环(124)滑动安装在固定块(121)下端,将弹簧阻尼杆(125)固定安装在限位环(124)内部两侧,并将夹持环(126)固定安装在弹簧阻尼杆(125)前端,利用弹簧阻尼杆(125)使得夹持环(126)与限位环(124)弹性连接,将手指放在限位环(124)内部,并通过夹持环(126)将手指进行夹持,使得训练弯曲气管(11)带动柔性安装板(10)运动时,手指能够在限位环(124)中具备活动空间。
技术总结
本发明公开了一种防止压伤的手康复机器人及其操作方法,涉及手康复机器人技术领域,包括主架体和限位组件,所述主架体上端后侧设置有控制面板,所述主架体前端外侧增设有柔性安装板,且柔性安装板上端设置有训练弯曲气管,所述柔性安装板下端设置有限位组件,且限位组件包括固定块、安装滑槽、安装滑块、限位环、弹簧阻尼杆和夹持环,所述固定块内部下端开设有安装滑槽,且安装滑槽内部连接有安装滑块,并且安装滑块下端设置有限位环,同时限位环内部两侧增设有弹簧阻尼杆,所述弹簧阻尼杆前端设置有夹持环。该防止压伤的手康复机器人及其操作方法,能够适配使用者手指的大小,避免使用过程中对手部造成压伤。
技术研发人员:张治国
受保护的技术使用者:河海大学苏州研究院
技术研发日:
技术公布日:2025/1/13
- 还没有人留言评论。精彩留言会获得点赞!