一种精度信息的生成方法以及生成系统与流程
本发明涉及手术机器人的,具体涉及一种精度信息的生成方法以及生成系统。
背景技术:
1、手术机器人是一种专门用于辅助外科手术的高精度智能设备,结合了机械、电子和计算机等技术。它能够通过机械臂和末端工具,在外科医生的控制下执行微创手术中的精细操作,如切割、缝合、定位等。手术机器人可以配备影像系统、多自由度的机械臂、导航装置和相配套的跟踪器以及控制系统。
2、在对手术机器人精度测量的场景下,存在未考虑手术机器人的具体工况,从而导致测量的精度信息不够全面的技术问题。
技术实现思路
1、本发明的目的在于克服上述技术不足,提供一种精度信息的生成方法以及生成系统,以解决在对手术机器人精度测量的场景下,未考虑手术机器人的具体工况,从而导致测量的精度信息不够全面的技术问题。
2、为达到上述技术目的,本发明采取了以下技术方案:
3、第一方面,本发明提供了一种精度信息的生成方法,所述方法包括:
4、接收表示当前工况的工况信息;
5、在当前工况下,向被测机器人发送移动指令,使得被测机器人执行预设的移动操作;其中,所述移动操作使得所述被测机器人的末端工具移动至至少一个目标位置处;其中,所述末端工具被配置有第一标定点,所述第一标定点用于标定所述末端工具的位姿;其中,所述目标位置处被配置有第二标定点,所述第二标定点用于标定所述目标位置的位姿;
6、在接收到所述被测机器人发送的反馈信息的情况下,至少获取当前第一标定点的位姿信息;其中,所述反馈信息是用于表示所述被测机器人确认达到目标位置的信息;
7、基于所述工况信息、所述第一标定点的位姿信息以及预先获取到的第二标定点的位姿信息,生成精度信息。
8、第二方面,本发明提供了一种精度信息的分析方法,所述方法包括:
9、获取多个工况下的精度信息;其中,所述精度信息是由上述的一种精度信息的生成方法生成的;
10、对所述多个工况下的精度信息,执行至少一种的数据分析方法,得到精度分析结果信息。
11、第三方面,本发明提供了一种工况信息的确定方法,所述方法包括;
12、接收表示精度要求的数据;
13、获取精度信息或者精度分析结果信息;其中,所述精度信息是由上述的一种精度信息的生成方法生成的,所述精度分析结果信息是由上述的一种精度信息的分析方法生成的;
14、基于所述表示精度要求的数据,从所述精度信息中或者从所述精度分析结果信息中,确定最优工况信息。
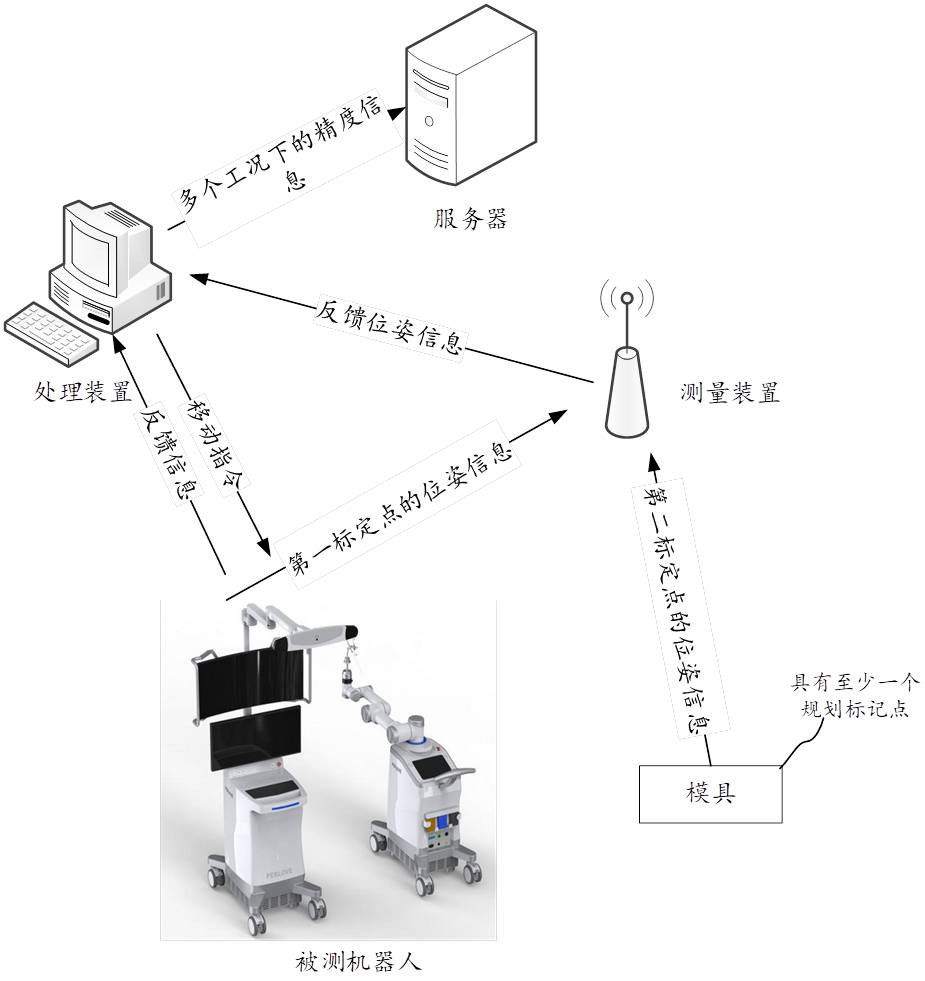
15、第四方面,本发明提供了一种精度信息的生成系统,包括:
16、第一标记装置,其用于与被测机器人的末端工具相连接,且设置有第一标定点;其中,所述第一标定点用于标定所述末端工具的位姿;
17、第二标记装置,其用于提供在测量被测机器人的精度时,末端工具将移动到的目标位置,且设置有第二标定点;其中,所述第二标定点用于标定所述目标位置的位姿;
18、测量装置,其用于检测所述第一标定点和第二标定点的位姿信息;
19、处理装置,其用于接收表示当前工况的工况信息,并且基于所述工况信息、所述第一标定点的位姿信息以及预先获取到的第二标定点的位姿信息,生成精度信息。
20、有益效果
21、本发明通过接收表示当前工况的工况信息,并结合被测机器人末端工具的第一标定点位姿信息及目标位置的第二标定点位姿信息,实现了精度信息与工况的动态关联。相比相关技术中仅在单一或理想工况下对机器人精度进行测量,本发明能够全面反映手术机器人在不同工况下的精度表现,从而克服了相关技术中未考虑具体工况可能导致测量精度信息片面的问题,有效提升了精度评估的全面性与针对性。
技术特征:
1.一种精度信息的生成方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述在接收到所述被测机器人发送的反馈信息的情况下,至少获取当前第一标定点的位姿信息的步骤,包括:
3.根据权利要求1所述的方法,其特征在于,在所述向被测机器人发送移动指令,使得被测机器人执行预设的移动操作的步骤,与所述至少获取当前第一标定点的位姿信息的步骤之间,所述方法还包括:
4.根据权利要求1所述的方法,其特征在于,基于所述工况信息、所述第一标定点的位姿信息以及预先获取到的第二标定点的位姿信息,生成精度信息的步骤,包括:
5.一种精度信息的分析方法,其特征在于,所述方法包括:
6.根据权利要求5所述的方法,其特征在于,所述工况至少包括被测机器人的导航装置的视野、被测机器人的跟踪器的被配置角度以及被测机器人的初始姿态;
7.根据权利要求5所述的方法,其特征在于,所述对所述多个工况下的精度信息,执行至少一种的数据分析方法,得到精度分析结果信息的步骤,包括:
8.一种工况信息的确定方法,其特征在于,所述方法包括;
9.根据权利要求8所述的确定方法,其特征在于,所述表示精度要求的数据包括目标患者的术中影像数据、手术类型和目标患者的安全系数,所述基于所述表示精度要求的数据,从所述精度信息中或者从所述精度分析结果信息中,确定最优工况信息的步骤,包括:
10.一种精度信息的生成系统,其特征在于,包括:
技术总结
本发明提供了一种精度信息的生成方法以及生成系统。本发明通过接收表示当前工况的工况信息,并结合被测机器人末端工具的第一标定点位姿信息及目标位置的第二标定点位姿信息,实现了精度信息与工况的动态关联。相比相关技术中仅在单一或理想工况下对机器人精度进行测量,本发明能够全面反映手术机器人在不同工况下的精度表现,从而克服了相关技术中未考虑具体工况可能导致测量精度信息片面的问题,有效提升了精度评估的全面性与针对性。
技术研发人员:贾英杰,邓明明,张淼,刘铁昌
受保护的技术使用者:北京天智航医疗科技股份有限公司
技术研发日:
技术公布日:2025/1/28
- 还没有人留言评论。精彩留言会获得点赞!