一种膝关节置换手术中的载荷和间隙平衡系统
本发明涉及平衡系统,尤其涉及一种膝关节置换手术中的载荷和间隙平衡系统。
背景技术:
1、膝关节置换手术是一种常见的手术,用于缓解严重膝关节退行性变患者的疼痛和改善其活动能力。然而,由于在手术过程中平衡膝关节内侧/外侧副韧带、后交叉韧带和髌骨韧带的伸展和屈曲间隙以及组织应力(载荷)的复杂性,实现最佳结果可能具有挑战性。例如,每个患者的内侧副韧带mcl和外侧副韧带lcl的应力(载荷)是不同的。传统上,医生依靠手动技术和主观评估来实现对称间隙平衡和韧带应力。这些方法通常会导致不理想的结果,并可能导致并发症,如不稳定、活动范围有限和人工膝关节假体过早磨损。鉴于此,本发明提出一种膝关节置换手术中的载荷和间隙平衡系统。
技术实现思路
1、本发明的目的是针对背景技术中存在医生依靠手动技术和主观评估来实现对称间隙平衡和韧带应力,会导致不理想的结果,并可能导致并发症,如不稳定、活动范围有限和人工膝关节假体过早磨损的问题,提出一种膝关节置换手术中的载荷和间隙平衡系统。
2、本发明的技术方案:一种膝关节置换手术中的载荷和间隙平衡系统,包括膝关节,所述膝关节包括股骨以及胫骨,所述股骨与胫骨之间连接有内侧副韧带和外侧副韧带;用于切除股骨的第一截骨导向器,所述第一截骨导向器切除股骨部分形成远端截骨平面,所述远端截骨平面位置安装有股骨假体;用于切除胫骨的第二截骨导向器,所述第二截骨导向器切除胫骨部分形成近端截骨平面,所述近端截骨平面安装有胫骨假体;所述股骨被切除部分包括第一内间室以及第一外间室,所述胫骨被切除部分包括第二内间室以及第二外间室,所述远端截骨平面与近端截骨平面形成矩形伸展间隙,所述矩形伸展间隙包括伸展内侧间隙和伸展外侧间隙;第一张紧装置,用于张紧韧带来测量间隙和载荷;膝关节的九十度屈曲状态中,两组所述第一基准孔建立旋转基准线,用于辅助对后髁进行切除以形成后髁截骨面,所述后髁截骨面与近端截骨平面之间形成屈曲间隙,所述屈曲间隙包括屈曲内侧间隙和屈曲外侧间隙,所述后髁截骨面与近端截骨平面之间设置有第二张紧装置;第二张紧装置,用于单独测量内外间室的屈曲间隙;张紧机构,用于张紧韧带来测量间隙与载荷;多组机械张紧器;安装于股骨上的旋转调节装置,用于确保股骨假体的精准就位;用于替代髌骨的髌骨试模,用于测量和调整髌骨假体的形状和大小,实现最佳的膝关节平衡;用于平衡内侧间室的伸展间隙的间隙平衡器,用于计算最佳假体位置和定向。
3、可选的,所述第一截骨导向器包括安装于股骨上的第一定位板,所述第一定位板上设置有两组第一钻头,所述第一钻头固定连接于股骨远端,所述股骨的远端设置有与第一钻头相配合的第一基准孔,所述第一定位板上安装有第一导向板,所述第一导向板上设置有第一导槽,所述第一导向板中设置有两组第一销钉,所述第一销钉固定连接于股骨上,所述远端截骨平面与两组第一基准孔用于确定股骨假体的三个位置以及三个旋转。
4、可选的,所述第二截骨导向器包括安装于胫骨上的第二定位板,所述第二定位板上设置有两组第二钻头,所述第二钻头固定连接于胫骨近端,所述胫骨的近端设置有与第二钻头相配合的第二基准孔,所述第二定位板上安装有第二导向板,所述第二导向板上设置有第二导槽,所述第二导向板中设置有两组第二销钉,所述第二销钉固定连接于胫骨上,所述胫骨近端截骨平面与两组第二基准孔用于确定胫骨假体的三个位置以及三个旋转。
5、可选的,所述第一张紧装置包括转动连接的两组第一支撑杆,所述第一支撑杆的一端固定连接有第一手柄,所述第一支撑杆远离第一手柄的一端固定连接有支撑板,两组所述支撑板位于远端截骨平面与近端截骨平面之间。
6、可选的,所述第一张紧装置还包括安装于第一手柄附近的第一距离传感器,两组所述第一支撑杆上均安装有第一载荷传感器,两组所述手柄之间还设置有锁定机械装置。
7、可选的,所述第二张紧装置包括转动连接的两组第二支撑杆,所述第二支撑杆的一端固定连接有第二手柄,一组所述第二支撑杆远离第二手柄的一端固定连接有直角撑板,所述直角撑板上设置有可视标志,另一组所述第二支撑杆远离第二手柄的一端固定连接有平行撑板,所述直角撑板的水平部分以及平行撑板插入屈曲间隙中,所述直角撑板通过固定钉穿过第一基准孔固定在远端截骨平面上,所述平行撑板通过固定钉穿过第二基准孔固定在近端截骨平面上。
8、可选的,所述张紧机构包括第一薄板,所述第一薄板上安装有两组第一固定钉,所述第一固定钉安装于第一基准孔中,所述第一薄板的中心位置设置有旋转铰链,所述旋转铰链位置安装有角度传感器,所述旋转铰链上连接有t形板,t形板包括转动连接在旋转铰链上的垂直板,所述垂直板远离旋转铰链的一端固定连接有水平板,还包括第二薄板,所述第二薄板上安装有两组第二固定钉,所述第二固定钉安装于第二基准孔中,所述第一固定钉位置安装有第二距离传感器。
9、可选的,所述旋转调节装置包括固定臂,所述固定臂上安装有两组第三销钉,所述第三销钉安装于第一基准孔中,所述固定臂为l形设置,所述固定臂上还设置有第三钻头,所述第三钻头平行于远端截骨平面插入股骨内侧,所述固定臂靠近股骨一侧设置有远端补偿,所述第三钻头上安装有安装块,所述安装块上螺纹连接有螺钉,所述螺钉上转动连接有夹板,所述夹板侧面安装有机器人,所述机器人上连接有定位器,所述定位器上开设有刀槽。
10、可选的,所述髌骨试模中设置有三轴载荷传感器,所述髌骨试模包括圆顶状表面、基板以及至少两组定位钉,所述髌骨试模内部设置有pcb板,三轴载荷传感器由多个可变梁组成,可变梁的中心为圆块,每个梁上均安装有至少一组载荷传感器,多组可变梁的外侧设置有壳体,所述壳体上安装有至少一组支柱。
11、可选的,所述间隙平衡器包括电动致动器,所述电动致动器的输出端固定连接有垂直丝杠,所述垂直丝杠用于驱动一组机械张紧器。
12、综上所述,本申请包括以下至少一种有益技术效果:
13、本发明通过采用间隙/载荷力平衡装置的形式,该装置在整个运动范围内测量膝关节的内侧、外侧和髌股3个间室。试模假体中安装的传感器设备可测量载荷和间隙,根据假体设计、骨骼形态和膝关节对线进行组织分析,确定股骨、胫骨和髌骨构件的最佳大小、厚度和形状。根据实时数据,软组织分析可用于推荐假体尺寸和形状的最佳组合,实现预期的疗效;
14、进一步通过利用蓝牙、蜂窝或wi-f i等技术,该系统可实现传感器设备与计算机、机器人手术系统之间有线或无线的无缝数据传输,确保了高效可靠的数据交换,增强了整体手术体验;
15、综上所述,本发明能够精确测量间隙、精确张紧韧带、实现个性化对线、优化假体选择,有效改善膝关节置换的手术效果、患者满意度和假体的长期耐用性。
技术特征:
1.一种膝关节置换手术中的载荷和间隙平衡系统,其特征在于,包括:
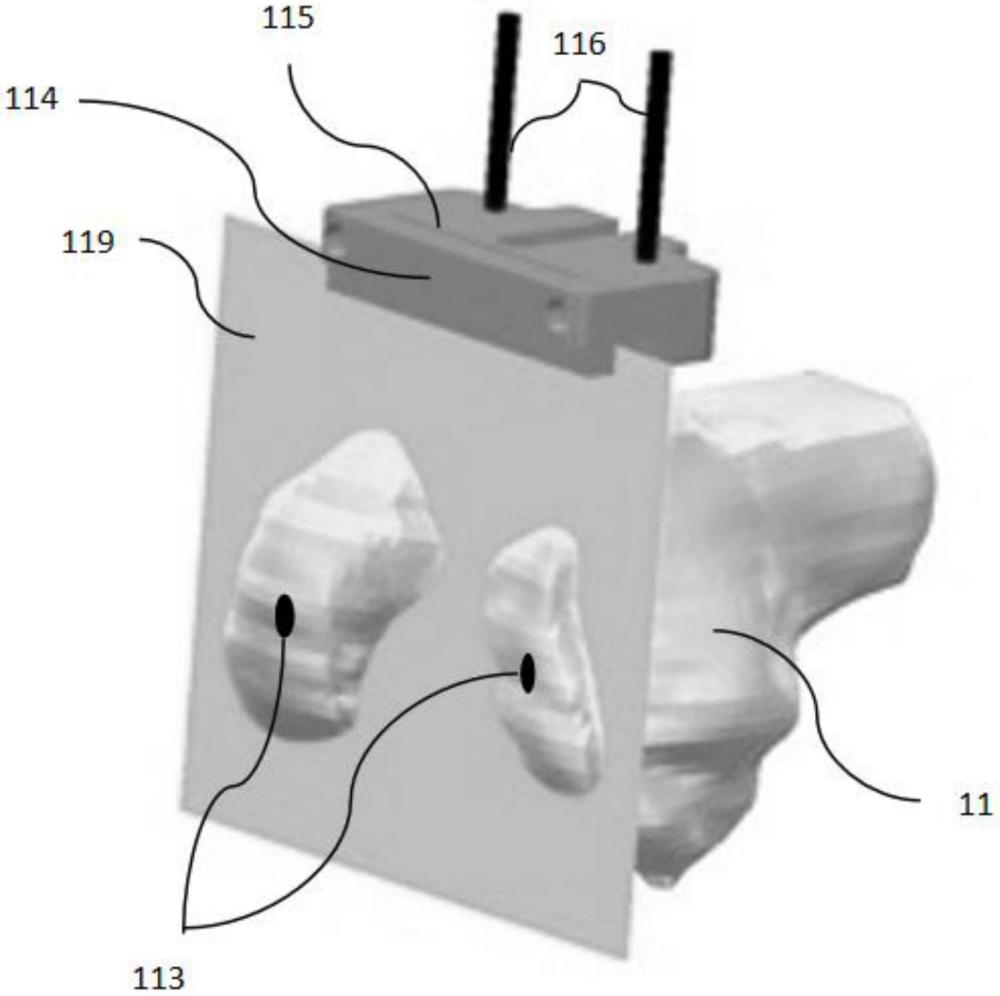
2.根据权利要求1所述的一种膝关节置换手术中的载荷和间隙平衡系统,其特征在于,所述第一截骨导向器(110)包括安装于股骨(11)上的第一定位板(111),所述第一定位板(111)上设置有两组第一钻头(112),所述第一钻头(112)固定连接于股骨(11)远端,所述股骨(11)的远端设置有与第一钻头(112)相配合的第一基准孔(113),所述第一定位板(111)上安装有第一导向板(114),所述第一导向板(114)上设置有第一导槽(115),所述第一导向板(114)中设置有两组第一销钉(116),所述第一销钉(116)固定连接于股骨(11)上,所述远端截骨平面(119)与两组第一基准孔(113)用于确定股骨假体(1000)的三个位置以及三个旋转。
3.根据权利要求2所述的一种膝关节置换手术中的载荷和间隙平衡系统,其特征在于,所述第二截骨导向器(120)包括安装于胫骨(12)上的第二定位板(121),所述第二定位板(121)上设置有两组第二钻头(122),所述第二钻头(122)固定连接于胫骨(12)近端,所述胫骨(12)的近端设置有与第二钻头(122)相配合的第二基准孔(123),所述第二定位板(121)上安装有第二导向板(124),所述第二导向板(124)上设置有第二导槽(125),所述第二导向板(124)中设置有两组第二销钉(126),所述第二销钉(126)固定连接于胫骨(12)上,所述胫骨(12)近端截骨平面(129)与两组第二基准孔(123)用于确定胫骨假体(2000)的三个位置以及三个旋转。
4.根据权利要求3所述的一种膝关节置换手术中的载荷和间隙平衡系统,其特征在于,所述第一张紧装置(4)包括转动连接的两组第一支撑杆(41),所述第一支撑杆(41)的一端固定连接有第一手柄(42),所述第一支撑杆(41)远离第一手柄(42)的一端固定连接有支撑板(43),两组所述支撑板(43)位于远端截骨平面(119)与近端截骨平面(129)之间。
5.根据权利要求4所述的一种膝关节置换手术中的载荷和间隙平衡系统,其特征在于,所述第一张紧装置(4)还包括安装于第一手柄(42)附近的第一距离传感器(44),两组所述第一支撑杆(41)上均安装有第一载荷传感器(45),两组所述手柄之间还设置有锁定机械装置(46)。
6.根据权利要求5所述的一种膝关节置换手术中的载荷和间隙平衡系统,其特征在于,所述第二张紧装置(5)包括转动连接的两组第二支撑杆(51),所述第二支撑杆(51)的一端固定连接有第二手柄(52),一组所述第二支撑杆(51)远离第二手柄(52)的一端固定连接有直角撑板(53),所述直角撑板(53)上设置有可视标志(55),另一组所述第二支撑杆(51)远离第二手柄(52)的一端固定连接有平行撑板(54),所述直角撑板(53)的水平部分以及平行撑板(54)插入屈曲间隙(300)中,所述直角撑板(53)通过固定钉穿过第一基准孔(113)固定在远端截骨平面(119)上,所述平行撑板(54)通过固定钉穿过第二基准孔(123)固定在近端截骨平面(129)上。
7.根据权利要求6所述的一种膝关节置换手术中的载荷和间隙平衡系统,其特征在于,所述张紧机构(6)包括第一薄板(61),所述第一薄板(61)上安装有两组第一固定钉(62),所述第一固定钉(62)安装于第一基准孔(113)中,所述第一薄板(61)的中心位置设置有旋转铰链(63),所述旋转铰链(63)位置安装有角度传感器,所述旋转铰链(63)上连接有t形板,t形板包括转动连接在旋转铰链(63)上的垂直板(64),所述垂直板(64)远离旋转铰链(63)的一端固定连接有水平板(65),还包括第二薄板(66),所述第二薄板(66)上安装有两组第二固定钉(67),所述第二固定钉(67)安装于第二基准孔(123)中,所述第一固定钉(62)位置安装有第二距离传感器(68)。
8.根据权利要求7所述的一种膝关节置换手术中的载荷和间隙平衡系统,其特征在于,所述旋转调节装置(7)包括固定臂(71),所述固定臂(71)上安装有两组第三销钉(72),所述第三销钉(72)安装于第一基准孔(113)中,所述固定臂(71)为l形设置,所述固定臂(71)上还设置有第三钻头(73),所述第三钻头(73)平行于远端截骨平面(119)插入股骨(11)内侧,所述固定臂(71)靠近股骨(11)一侧设置有远端补偿(74),所述第三钻头(73)上安装有安装块(75),所述安装块(75)上螺纹连接有螺钉(76),所述螺钉(76)上转动连接有夹板(77),所述夹板(77)侧面安装有机器人(78),所述机器人(78)上连接有定位器(79),所述定位器(79)上开设有刀槽(710)。
9.根据权利要求8所述的一种膝关节置换手术中的载荷和间隙平衡系统,其特征在于,所述髌骨试模(9)中设置有三轴载荷传感器(91),所述髌骨试模(9)包括圆顶状表面(92)、基板(93)以及至少两组定位钉(94),所述髌骨试模(9)内部设置有pcb板(95),三轴载荷传感器(91)由多个可变梁组成,可变梁的中心为圆块(96),每个梁上均安装有至少一组载荷传感器,多组可变梁的外侧设置有壳体(97),所述壳体(97)上安装有至少一组支柱(98)。
10.根据权利要求9所述的一种膝关节置换手术中的载荷和间隙平衡系统,其特征在于,所述间隙平衡器(8)包括电动致动器(81),所述电动致动器(81)的输出端固定连接有垂直丝杠(82),所述垂直丝杠(82)用于驱动一组机械张紧器(2)。
技术总结
本发明涉及平衡系统技术领域,尤其涉及一种膝关节置换手术中的载荷和间隙平衡系统。其主要针对医生依靠手动技术和主观评估来实现对称间隙平衡和韧带应力,会导致不理想的结果,并可能导致并发症,如不稳定、活动范围有限和人工膝关节假体过早磨损的问题,提出如下技术方案:包括膝关节,所述膝关节包括股骨以及胫骨,所述股骨与胫骨之间连接有内侧副韧带和外侧副韧带;用于切除股骨的第一截骨导向器,所述第一截骨导向器切除股骨部分形成远端截骨平面,所述远端截骨平面位置安装有股骨假体。本发明能够精确测量间隙、精确张紧韧带、实现个性化对线、优化假体选择,有效改善膝关节置换的手术效果、患者满意度和假体的长期耐用性。
技术研发人员:田华,耿霄
受保护的技术使用者:北京大学第三医院(北京大学第三临床医学院)
技术研发日:
技术公布日:2025/4/7
- 还没有人留言评论。精彩留言会获得点赞!