一种手部康复机器人
本技术涉及医疗器械领域,具体是一种手部康复机器人。
背景技术:
1、随着医疗科学技术的不断发展,康复治疗成为一门促进患者和残疾人身心功能康复的新的治疗学科,同时也是一门新的技术专业,手部康复机器人就是为了治疗患者手部,使其手部恢复效果更好,恢复速度更快的一种治疗器械。
2、在本领域人员实际使用中,手部康复机器人在固定到患者手部时,通常会采用较为硬性的固定方式,硬性的固定方式不仅会让患者感到非常的不舒服,还有可能会伤到患者皮肤;因此,针对上述问题提出一种手部康复机器人。
技术实现思路
1、为了弥补现有技术的不足,解决了手部康复机器人在固定到患者手部时,通常会采用较为硬性的固定方式的问题,本实用新型提出一种手部康复机器人。
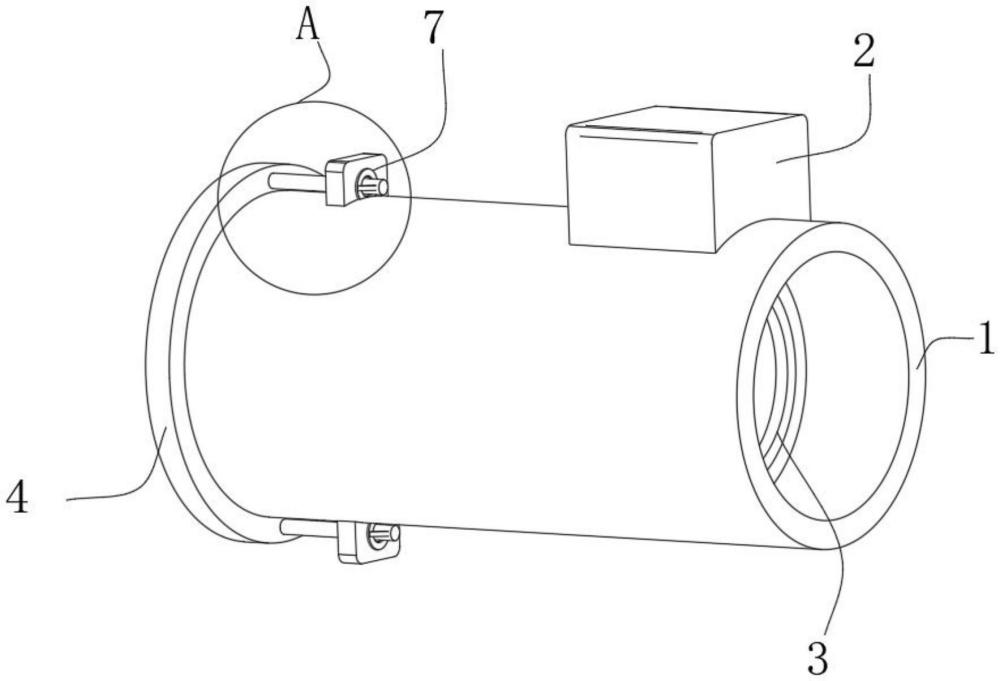
2、本实用新型解决其技术问题所采用的技术方案是:本实用新型所述的一种手部康复机器人,包括固定蓄电筒,所述固定蓄电筒的外部固定连接有固定箱,所述固定箱的内部设有固定组件,所述固定组件延伸至固定蓄电筒的内部,所述固定蓄电筒的一侧设置有固定盘,所述固定盘的一侧固定连接有承接筒,所述承接筒位于固定蓄电筒的内部,所述固定蓄电筒的内部固定连接有加热管,所述固定蓄电筒的外部设置有两个呈对称分布的连接组件。
3、优选地,所述固定组件包括固定气囊、弹性气囊、推板、电推杆和连接管,所述固定气囊固定连接在固定蓄电筒的内部,所述弹性气囊固定连接在固定箱的内部,所述推板活动连接在固定箱的内部,所述电推杆固定连接在固定箱的内部,所述电推杆的输出端与推板的一侧固定连接,所述连接管连通在固定气囊与弹性气囊之间。
4、优选地,所述连接组件包括插板、插杆和弹性块,所述插板固定连接在固定蓄电筒的外部,所述插杆固定连接在固定盘的一侧,两个所述弹性块均呈对称固定连接在插杆的一端,所述插杆插接在插板的内部。
5、优选地,所述固定箱的内部开设有滑槽,所述推板的外部固定连接有滑板,所述推板通过滑板滑动连接在滑槽的内部。
6、优选地,所述固定气囊的内部固定连接有柔性垫,所述柔性垫的材质为橡胶。
7、优选地,所述承接筒为导热筒。
8、优选地,所述插板的一侧固定连接有磁铁,所述磁铁与弹性块磁性连接。
9、本实用新型的有益之处在于:
10、1.本实用新型使用时,患者将手伸入固定蓄电筒的内部,然后启动电推杆,电推杆的输出端推动推板,这样推板就会挤压弹性气囊,那么弹性气囊内部的空气就会通过连接管进入固定气囊的内部,那么固定气囊充气膨胀,就会挤压患者胳膊,那么就会将患者胳膊夹住,从而将本装置固定在患者胳膊上,通过这种柔性的固定方式不会损伤患者的胳膊;
11、2.本实用新型清理承接筒时,将弹性块捏住贴合插杆的外部,然后拉动固定盘,将插杆拔出插板的内部,即可将承接筒拆下清洗,安装时,只需直接将插杆插入插板的内部,那么弹性块首先会被压缩,然后穿过插板后会展开,这样就能够进行限位,从而将固定盘位置固定。
技术特征:
1.一种手部康复机器人,其特征在于:包括固定蓄电筒(1),所述固定蓄电筒(1)的外部固定连接有固定箱(2),所述固定箱(2)的内部设有固定组件(3),所述固定组件(3)延伸至固定蓄电筒(1)的内部,所述固定蓄电筒(1)的一侧设置有固定盘(4),所述固定盘(4)的一侧固定连接有承接筒(5),所述承接筒(5)位于固定蓄电筒(1)的内部,所述固定蓄电筒(1)的内部固定连接有加热管(6),所述固定蓄电筒(1)的外部设置有两个呈对称分布的连接组件(7)。
2.根据权利要求1所述的一种手部康复机器人,其特征在于:所述固定组件(3)包括固定气囊(301)、弹性气囊(302)、推板(303)、电推杆(304)和连接管(305),所述固定气囊(301)固定连接在固定蓄电筒(1)的内部,所述弹性气囊(302)固定连接在固定箱(2)的内部,所述推板(303)活动连接在固定箱(2)的内部。
3.根据权利要求2所述的一种手部康复机器人,其特征在于:所述电推杆(304)固定连接在固定箱(2)的内部,所述电推杆(304)的输出端与推板(303)的一侧固定连接,所述连接管(305)连通在固定气囊(301)与弹性气囊(302)之间。
4.根据权利要求3所述的一种手部康复机器人,其特征在于:所述连接组件(7)包括插板(701)、插杆(702)和弹性块(703),所述插板(701)固定连接在固定蓄电筒(1)的外部,所述插杆(702)固定连接在固定盘(4)的一侧,两个所述弹性块(703)均呈对称固定连接在插杆(702)的一端,所述插杆(702)插接在插板(701)的内部。
5.根据权利要求4所述的一种手部康复机器人,其特征在于:所述固定箱(2)的内部开设有滑槽(8),所述推板(303)的外部固定连接有滑板(9),所述推板(303)通过滑板(9)滑动连接在滑槽(8)的内部。
6.根据权利要求5所述的一种手部康复机器人,其特征在于:所述固定气囊(301)的内部固定连接有柔性垫(10),所述柔性垫(10)的材质为橡胶。
7.根据权利要求6所述的一种手部康复机器人,其特征在于:所述承接筒(5)为导热筒。
8.根据权利要求7所述的一种手部康复机器人,其特征在于:所述插板(701)的一侧固定连接有磁铁(11),所述磁铁(11)与弹性块(703)磁性连接。
技术总结
本技术属于医疗器械领域,具体的说是一种手部康复机器人,包括固定蓄电筒,所述固定蓄电筒的外部固定连接有固定箱,所述固定箱的内部设有固定组件,所述固定组件延伸至固定蓄电筒的内部,所述固定蓄电筒的一侧设置有固定盘,所述固定盘的一侧固定连接有承接筒,所述承接筒位于固定蓄电筒的内部;使用时,患者将手伸入固定蓄电筒的内部,然后启动电推杆,电推杆的输出端推动推板,这样推板就会挤压弹性气囊,那么弹性气囊内部的空气就会通过连接管进入固定气囊的内部,那么固定气囊充气膨胀,就会挤压患者胳膊,那么就会将患者胳膊夹住,从而将本装置固定在患者胳膊上,通过这种柔性的固定方式不会损伤患者的胳膊。
技术研发人员:张化平,仇未星,唐小强
受保护的技术使用者:兰州石化职业技术大学
技术研发日:20240117
技术公布日:2024/10/10
- 还没有人留言评论。精彩留言会获得点赞!