下肢体能训练机器人的制作方法
本技术属于康复机器人,具体涉及下肢体能训练机器人。
背景技术:
1、下肢康复机器人是一种基于机器人技术的医疗设备,主要用于帮助下肢运动障碍患者进行康复训练。
2、专利号cn202120609509.1公开了一种下肢康复机器人,由机器人本体、对称安装在机器人本体两侧可转动的两个上肢部、可转动安装在上肢部远离机器人本体一端的腿部关节、可转动安装在腿部关节远离上肢部一端的下肢部、可转动安装在下肢部远离腿部关节一端的脚部关节、可转动安装在脚部关节远离下肢部一端的脚托部和安装在上肢部和下肢部上的皮带构成,下肢康复机器人训练时,将脚放置在脚腿部上,腿部贴在两个上下肢部壁,通过皮带进行固定,再通过可转动的上肢部、腿部关节、下肢部、脚部关节和脚托部的转动实现下肢的锻炼康复。
3、本申请发明人发现:上述即现有下肢康复机器人的上肢部和下肢部长度无法根据锻炼患者的腿部长度进行调节,降低了腿部长度不适配机器人的锻炼患者的锻炼舒适性。
技术实现思路
1、为解决上述背景技术中提出的问题。本实用新型提供了下肢体能训练机器人,具有能够根据锻炼患者的腿部长度进行调节,提高不同锻炼患者的锻炼舒适度,增强锻炼康复效果的特点。
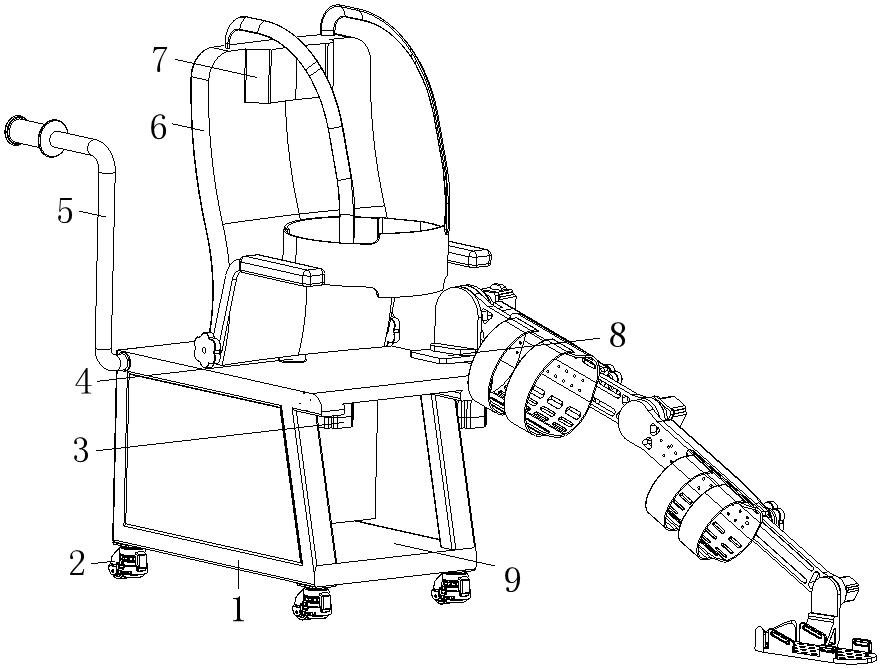
2、为实现上述目的,本实用新型提供如下技术方案:下肢体能训练机器人,包括:座椅,所述座椅顶端一侧固接有安装板,所述安装板下方固接有第二电机,所述第二电机输出轴贯穿安装板延伸至上方固接有装配架,所述装配架外壁固接有第三电机,所述第三电机输出轴贯穿装配架延伸至内部装配有大腿支撑机构,所述大腿支撑机构远离第三电机一端装配有小腿支撑机构,所述大腿支撑机构与小腿支撑机构间装配有驱动小腿支撑机构转动的第五电机,所述小腿支撑机构远离大腿支撑机构一端放置有脚部支撑架,所述小腿支撑机构与脚部支撑架间装配有驱动脚部支撑架转动的第四电机;
3、所述大腿支撑机构包括放置在装配架内部与第三电机输出轴固接的腿部固定架,所述腿部固定架一侧内部开设有远离装配架一端开口的活动槽,所述活动槽内部放置有远离装配架一端穿过活动槽开口延伸至外界的腿部活动架,所述腿部活动架与腿部固定架间装配有锁紧机构,所述腿部固定架另一侧等间距开设有多个与活动槽连通的螺丝孔,所述腿部固定架靠近螺丝孔一侧放置有通过螺丝连接在螺丝孔上与腿部固定架固接的腿部支撑架,所述腿部支撑架远离腿部固定架侧壁对称固接有两个弹性带;
4、所述小腿支撑机构与大腿支撑机构结构相同但尺寸不同,第五电机固接在大腿支撑机构的腿部活动架上,且靠近小腿支撑机构,第五电机输出轴贯穿大腿支撑机构的腿部活动架与小腿支撑机构的腿部固定架固接,第四电机固接在小腿支撑机构的腿部活动架靠近脚部支撑架的端壁上,第四电机输出轴贯穿小腿支撑机构的腿部活动架与脚部支撑架固接。
5、进一步的,所述锁紧机构包括防护外壳和锁紧槽,防护外壳固接在大腿支撑机构和小腿支撑机构的腿部固定架远离腿部支撑架侧壁上,锁紧槽开设在大腿支撑机构和小腿支撑机构的腿部活动架远离腿部支撑架的侧壁上,所述防护外壳上螺纹连接有第二调节螺丝,第二调节螺丝螺杆穿过防护外壳和活动槽延伸至锁紧槽内,第二调节螺丝螺杆与腿部固定架贯穿段间螺纹连接。
6、进一步的,所述座椅顶端远离安装板一侧通过螺丝对称固接有两个推拉把手,所述座椅底端四角通过螺丝分别固接有移动轮。
7、进一步的,所述座椅顶端中间连接有靠背,所述靠背靠近安装板侧壁顶端固接有头枕,所述靠背底端对称螺纹连接有两个第一调节螺丝,所述第一调节螺丝上位于调节柄与靠背间固接有扶手。
8、进一步的,所述靠背顶端对称固接有两个身体固定带,两个所述身体固定带远离靠背一端固接有前腰带,所述靠背靠近前腰带侧壁对应前腰带位置固接有后腰带,所述前腰带靠近后腰带侧内壁对称固接有两个魔术母贴,所述后腰带靠近前腰带侧外壁对称固接有两个分别与两个魔术母贴配合粘连的魔术子贴。
9、进一步的,所述座椅内部开设有装配腔,所述座椅位于装配腔内顶端壁固接有第一电机,所述座椅顶端中间通过轴承连接有装配轴,装配轴顶端延伸至座椅上方与靠背底端连接,装配轴底端通过联轴器与第一电机输出轴连接。
10、与现有技术相比,本实用新型的有益效果是:
11、1、本实用新型腿部锻炼机构设置活动调节式的大腿支撑机构和小腿支撑机构以及脚部支撑架,能够根据锻炼患者的腿部长度进行调节,提高不同锻炼患者的锻炼舒适度,同时大腿支撑机构可以前后左右四个方向上进行调节,大腿支撑机构与小腿支撑机构间可上下转动,小腿支撑机构与脚部支撑架间咳上下转动,能够多方位的对锻炼患者的腿部和脚部进行锻炼,提高机器人的锻炼康复效果。
12、2、本实用新型设置推拉把手和移动轮,方便移动机器人,提高机器人的移动便捷性。
13、3、本实用新型设置可转动靠背和上身固定机构,能够提高锻炼舒适度,同时保证锻炼过程中上身姿势的正确,避免锻炼姿势不正确造成不舒适问题发生。
技术特征:
1.下肢体能训练机器人,其特征在于,包括:座椅(1),所述座椅(1)顶端一侧固接有安装板(8),所述安装板(8)下方固接有第二电机(15),所述第二电机(15)输出轴贯穿安装板(8)延伸至上方固接有装配架(17),所述装配架(17)外壁固接有第三电机(16),所述第三电机(16)输出轴贯穿装配架(17)延伸至内部装配有大腿支撑机构,所述大腿支撑机构远离第三电机(16)一端装配有小腿支撑机构,所述大腿支撑机构与小腿支撑机构间装配有驱动小腿支撑机构转动的第五电机(24),所述小腿支撑机构远离大腿支撑机构一端放置有脚部支撑架(22),所述小腿支撑机构与脚部支撑架(22)间装配有驱动脚部支撑架(22)转动的第四电机(23);
2.根据权利要求1所述的下肢体能训练机器人,其特征在于:所述锁紧机构包括防护外壳(26)和锁紧槽(25),防护外壳(26)固接在大腿支撑机构和小腿支撑机构的腿部固定架(18)远离腿部支撑架(19)侧壁上,锁紧槽(25)开设在大腿支撑机构和小腿支撑机构的腿部活动架(21)远离腿部支撑架(19)的侧壁上,所述防护外壳(26)上螺纹连接有第二调节螺丝(27),第二调节螺丝(27)螺杆穿过防护外壳(26)和活动槽(28)延伸至锁紧槽(25)内,第二调节螺丝(27)螺杆与腿部固定架(18)贯穿段间螺纹连接。
3.根据权利要求1所述的下肢体能训练机器人,其特征在于:所述座椅(1)顶端远离安装板(8)一侧通过螺丝对称固接有两个推拉把手(5),所述座椅(1)底端四角通过螺丝分别固接有移动轮(2)。
4.根据权利要求1所述的下肢体能训练机器人,其特征在于:所述座椅(1)顶端中间连接有靠背(6),所述靠背(6)靠近安装板(8)侧壁顶端固接有头枕(7),所述靠背(6)底端对称螺纹连接有两个第一调节螺丝(10),所述第一调节螺丝(10)上位于调节柄与靠背(6)间固接有扶手(11)。
5.根据权利要求4所述的下肢体能训练机器人,其特征在于:所述靠背(6)顶端对称固接有两个身体固定带(12),两个所述身体固定带(12)远离靠背(6)一端固接有前腰带(14),所述靠背(6)靠近前腰带(14)侧壁对应前腰带(14)位置固接有后腰带(13),所述前腰带(14)靠近后腰带(13)侧内壁对称固接有两个魔术母贴(31),所述后腰带(13)靠近前腰带(14)侧外壁对称固接有两个分别与两个魔术母贴(31)配合粘连的魔术子贴(30)。
6.根据权利要求4所述的下肢体能训练机器人,其特征在于:所述座椅(1)内部开设有装配腔(9),所述座椅(1)位于装配腔(9)内顶端壁固接有第一电机(3),所述座椅(1)顶端中间通过轴承连接有装配轴(4),装配轴(4)顶端延伸至座椅(1)上方与靠背(6)底端连接,装配轴(4)底端通过联轴器与第一电机(3)输出轴连接。
技术总结
本技术公开了下肢体能训练机器人,属于康复机器人技术领域,包括:座椅,所述座椅顶端一侧固接有安装板,所述安装板下方固接有第二电机,所述第二电机输出轴贯穿安装板延伸至上方固接有装配架,所述装配架外壁固接有第三电机;本技术腿部锻炼机构设置活动调节式的大腿支撑机构和小腿支撑机构以及脚部支撑架,能够根据锻炼患者的腿部长度进行调节,提高不同锻炼患者的锻炼舒适度,同时大腿支撑机构可以前后左右四个方向上进行调节,大腿支撑机构与小腿支撑机构间可上下转动,小腿支撑机构与脚部支撑架间咳上下转动,能够多方位的对锻炼患者的腿部和脚部进行锻炼,提高机器人的锻炼康复效果。
技术研发人员:陈盈杉,李博,李硕
受保护的技术使用者:河南省睿卡机器人制造有限公司
技术研发日:20240124
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!