具有位置提示装置的血管介入手术机器人的制作方法
本技术涉及医疗设备,具体而言,涉及一种具有位置提示装置的血管介入手术机器人。
背景技术:
1、现有的介入手术机器人本体上的介入耗材执行装置的运动位置主要是依靠设置在机器人本体上的位置检测元件将检测数据发送给主端,以使操作者能够在主端来进行读取,而如果观察者没有位于主端操控屏附近时就仅能靠肉眼来进行观察,特别是当其观察距离较大时,例如,当操作者位于手术室外隔着手术室的玻璃墙壁进行观察时,由于介入耗材执行装置相对于机器人本体的体积较小,且缺乏明显的位置提示,导致操作者在操作机器人时难以准确地判断介入耗材执行装置的位置。
技术实现思路
1、本实用新型的主要目的在于提供一种具有位置提示装置的血管介入手术机器人,以解决相关技术中的血管介入手术机器人无法使得操作者通过肉眼很好地观察介入耗材执行装置的运动位置的问题。
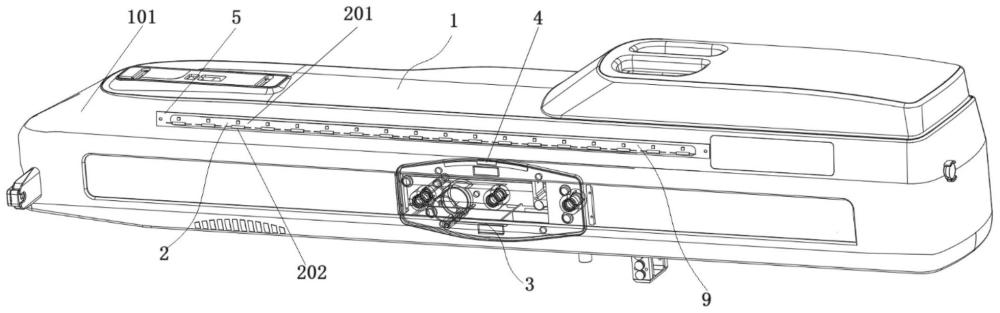
2、为了实现上述目的,本实用新型提供了一种具有位置提示装置的血管介入手术机器人,包括:机器人本体和介入耗材执行装置;其中,
3、所述介入耗材执行装置设于所述机器人本体上并可沿所述机器人本体的长度方向移动,所述介入耗材执行装置用于驱动介入耗材动作;
4、所述机器人本体上沿所述介入耗材执行装置的移动方向布置有多个提示元件,所述提示元件设置成能够在所述介入耗材执行装置移动至与其相对应的位置时作出提示。
5、进一步的,提示元件包括光源和触发开关,所述触发开关与所述光源电性连接;
6、所述介入耗材执行装置上设置有开关触发件,所述开关触发件设置成能够在所述介入耗材执行装置移动至相应位置时触发对应的所述触发开关,以使与所述触发开关对应的所述光源作出反应。
7、进一步的,当所述触发开关被触发时,与所述触发开关对应的所述光源所作出的反应为亮起或熄灭或闪烁。
8、进一步的,触发开关设置为常开型干簧管磁性开关,所述开关触发件设置为磁铁。
9、进一步的,触发开关设置为按压开关,所述按压开关包括延伸出所述机器人本体的表面的按压部;
10、所述开关触发件包括设于所述介入耗材执行装置上的按压块,所述按压部分布在所述按压块的移动路径上,所述按压块设置成能够随所述介入耗材执行装置的移动而接触并按压所述按压部。
11、进一步的,还包括位置检测元件,用于检测所述介入耗材执行装置在所述机器人本体上的工作位置,所述位置检测元件与所述提示元件电性连接,所述提示元件设置成能够基于所述位置检测元件获取的所述工作位置作出提示。
12、进一步的,光源设于所述机器人本体内,所述机器人本体的外壳上开设有与所述光源对应的透光槽,所述机器人本体的外壳上固设有封闭所述透光槽的透光板。
13、进一步的,机器人本体内设置有电路板,多个所述光源间隔布置在所述电路板上,所述触发开关通过所述电路板与所述光源和电源电性连接。
14、进一步的,电路板上设置有多个隔光板,多个所述隔光板间隔布置并位于相邻的所述光源之间;
15、所述隔光板的端部与所述透光板的内表面相抵,以将各所述光源的发光范围限制在设定的范围内。
16、进一步的,透光板固设于所述机器人本体的外壳的内侧,所述透光板的宽度大于或等于所述透光槽的宽度,所述透光板的两端设置有固定部,所述固定部与所述机器人本体的外壳固定连接。
17、本实用新型通过设置机器人本体和介入耗材执行装置;其中,介入耗材执行装置设于机器人本体上并可沿机器人本体的长度方向移动,介入耗材执行装置用于驱动介入耗材动作;机器人本体上沿介入耗材执行装置的移动方向布置有多个提示元件,提示元件设置成能够在介入耗材执行装置移动至与其相对应的位置时作出提示,达到了在介入耗材执行装置沿机器人本体的长度方向移动过程中,与当前介入耗材执行装置位置对应的提示元件能够作出提示,以示意当前介入耗材执行装置在机器人本体上的位置的目的,从而实现了对介入耗材执行装置在机器人本体上的位置进行提示,便于医生准确地获取当前介入耗材执行装置的运动位置的技术效果,进而解决了相关技术中的血管介入手术机器人无法使得操作者通过肉眼很好地观察介入耗材执行装置的运动位置的问题。
技术特征:
1.一种具有位置提示装置的血管介入手术机器人,其特征在于,包括:机器人本体和介入耗材执行装置;其中,
2.根据权利要求1所述的血管介入手术机器人,其特征在于,所述提示元件包括光源和触发开关,所述触发开关与所述光源电性连接;
3.根据权利要求2所述的血管介入手术机器人,其特征在于,当所述触发开关被触发时,与所述触发开关对应的所述光源所作出的反应为亮起或熄灭或闪烁。
4.根据权利要求2所述的血管介入手术机器人,其特征在于,所述触发开关设置为常开型干簧管磁性开关,所述开关触发件设置为磁铁。
5.根据权利要求2所述的血管介入手术机器人,其特征在于,所述触发开关设置为按压开关,所述按压开关包括延伸出所述机器人本体的表面的按压部;
6.根据权利要求1至5任一项所述的血管介入手术机器人,其特征在于,还包括位置检测元件,用于检测所述介入耗材执行装置在所述机器人本体上的工作位置,所述位置检测元件与所述提示元件电性连接,所述提示元件设置成能够基于所述位置检测元件获取的所述工作位置作出提示。
7.根据权利要求2至5任一项所述的血管介入手术机器人,其特征在于,所述光源设于所述机器人本体内,所述机器人本体的外壳上开设有与所述光源对应的透光槽,所述机器人本体的外壳上固设有封闭所述透光槽的透光板。
8.根据权利要求7所述的血管介入手术机器人,其特征在于,所述机器人本体内设置有电路板,多个所述光源间隔布置在所述电路板上,所述触发开关通过所述电路板与所述光源和电源电性连接。
9.根据权利要求8所述的血管介入手术机器人,其特征在于,所述电路板上设置有多个隔光板,多个所述隔光板间隔布置并位于相邻的所述光源之间;
10.根据权利要求9所述的血管介入手术机器人,其特征在于,所述透光板固设于所述机器人本体的外壳的内侧,所述透光板的宽度大于或等于所述透光槽的宽度,所述透光板的两端设置有固定部,所述固定部与所述机器人本体的外壳固定连接。
技术总结
本技术公开了一种具有位置提示装置的血管介入手术机器人,属于医疗器械领域,包括:机器人本体和介入耗材执行装置;其中,介入耗材执行装置设于机器人本体上并可沿机器人本体的长度方向移动,介入耗材执行装置用于驱动介入耗材动作;机器人本体上沿介入耗材执行装置的移动方向布置有多个提示元件,提示元件设置成能够在介入耗材执行装置移动至与其相对应的位置时作出提示。本技术实现了对介入耗材执行装置在机器人本体上的位置进行提示,便于医生准确地获取当前介入耗材执行装置的运动位置的技术效果。
技术研发人员:请求不公布姓名
受保护的技术使用者:北京万思医疗器械有限公司
技术研发日:20240204
技术公布日:2024/11/4
- 还没有人留言评论。精彩留言会获得点赞!