一种通信组件、电气箱及手术机器人的制作方法
本技术涉及手术机器人的,尤其涉及一种通信组件、电气箱及手术机器人。
背景技术:
1、目前,手术机器人的发展在医学领域产生了重大的影响,为传统医学带来了技术乃至观念上的根本变革。手术机器人通常包括主操作台和从手术操作台;其中,主操作台也称为医生操作台,作为手术机器人的输入控制设备和用户感知设备,其电气箱为其主要的控制设备,电气箱内需要配置通信组件,通信组件是信息互通传递的媒介。
2、为了提高手术机器人的适应性和通用性,整机结构的体积直接影响使用效果,而现有的通信组件体积较大,占据电气箱内较大体积。如何解决现有电气箱内通信组件体积大、占据较大空间是必须解决的关键技术之一。
技术实现思路
1、本实用新型的目的在于提供一种通信组件、电气箱及手术机器人,以解决现有的手术机器人的电气箱内通信组件占据较大空间的问题。
2、为达此目的,本实用新型采用以下技术方案:一种通信组件,包括:
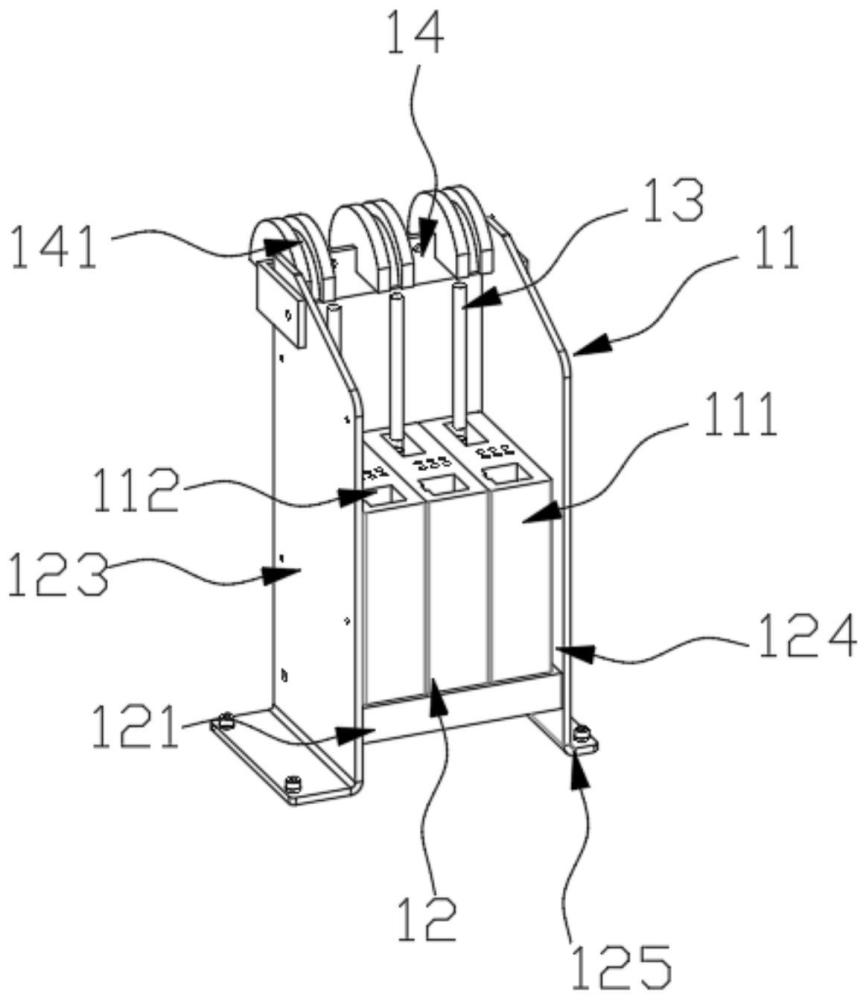
3、通信模组(11),所述通信模组包括多个通信件(111),多个所述通信件(111)能够提供多类通信容量模式;
4、支撑架(12),所述支撑架包括支撑基座(121);
5、所述支撑基座(121)自一端向另一端设置有延伸设置的安装通槽;
6、其中,所述安装通槽的一端配置有限位部(122),多个所述通信件的较大横截面能够自所述安装通槽的另一端垂直安装于所述支撑基座(121),所述限位部(122)能够对所述通信件(111)进行限位,且多个所述通信件(111)的第一连接端(112)和第二连接端(113)均能通过所述安装通槽的两端与外部走线连接。
7、作为优选,所述支撑架(12)包括防护部(123);
8、所述防护部(123)配置于所述支撑基座(121)的外侧,所述防护部(123)能够对所述通信件(111)的第一连接端(112)和第二连接端(113)的外部走线进行保护。
9、作为优选,所述防护部(123)包括防护板;
10、所述防护板能够凸出所述通信件(111)的最高点和最低点。
11、作为优选,所述防护板的顶端配置有楔形部。
12、作为优选,还包括引导架(14);
13、所述防护部(123)分别配置于所述支撑基座(121)相对的两侧,所述引导架(14)的一端与一侧的所述防护部(123)连接,所述引导架(14)的另一端与另一侧的所述防护部(123)连接。
14、作为优选,所述引导架(14)上配置有多个引导块;
15、所述引导块形成有引导弧槽(141),所述引导弧槽(141)沿所述外部走线方向弯折。
16、作为优选,所述支撑架(12)包括支撑腿(124);
17、所述支撑腿(124)的一端与所述支撑基座(121)连接,所述支撑腿(124)的另一端与底端面固定连接,以使所述通信件(111)的第二连接端与底端面间隔设置。
18、作为优选,所述支撑腿(124)的一端与所述支撑基座(121)的外侧壁面面贴合连接,所述支撑腿(124)的另一端配置有安装合页(125),所述安装合页(125)与底端面面贴合连接。
19、作为优选,所述限位部(122)包括限位边沿;
20、所述限位边沿能够沿所述支撑基座(121)的一端的内壁周向设置。
21、作为优选,所述通信件(111)的第二连接端(113)为电源端;
22、多个所述通信件(111)的电源端朝向相同,且电源端配置有连接线;
23、所述连接线包括总线端和分线端,所述总线端与电源连接,所述分线端分别与多个所述通信件(111)连接。
24、作为优选,多个所述通信件(111)插接于所述支撑基座(121)内。
25、一种电气箱,包括箱体和上述的通信组件;
26、所述通信组件安装于所述电气箱。
27、一种手术机器人,包括上述的电气箱(1)。
28、本实用新型的有益效果:
29、本实用新型提供的通信组件、电气箱及手术机器人,通信组件包括多个通信件,多个通信件能够提供多类通信容量模式;支撑架包括支撑基座;支撑基座的一端向另一端延伸设置有安装通槽;其中,安装通槽的一端配置有限位部,多个通信件的较大横截面能够自安装通槽的另一端垂直安装于支撑基座,限位部能够对通信件进行限位,且多个通信件的两连接端均能与外部走线连接。通过将多个通信件的较大横截面竖直安装于安装通槽的限位部,避免多个通信件的较大横截面占据电气箱内较大的横向面积,将多个通信件竖向安装在具有安装通槽的支撑基座内,再通过安装通槽的一端的限位部进行限位,既保证通信件的上下两端能够与外部走线,同时又实现多个通信件的模块化,减少其占据较大空间的问题。
技术特征:
1.一种通信组件,其特征在于,包括:
2.根据权利要求1所述的通信组件,其特征在于,所述支撑架(12)包括防护部(123);
3.根据权利要求2所述的通信组件,其特征在于,所述防护部(123)包括防护板;
4.根据权利要求3所述的通信组件,其特征在于,所述防护板的顶端配置有楔形部。
5.根据权利要求2所述的通信组件,其特征在于,还包括引导架(14);
6.根据权利要求5所述的通信组件,其特征在于,所述引导架(14)上配置有多个引导块;
7.根据权利要求1所述的通信组件,其特征在于,所述支撑架(12)包括支撑腿(124);
8.根据权利要求7所述的通信组件,其特征在于,所述支撑腿(124)的一端与所述支撑基座(121)的外侧壁面面贴合连接,所述支撑腿(124)的另一端配置有安装合页(125),所述安装合页(125)与底端面面贴合连接。
9.根据权利要求1所述的通信组件,其特征在于,所述限位部(122)包括限位边沿;
10.根据权利要求1所述的通信组件,其特征在于,所述通信件(111)的第二连接端(113)为电源端;
11.根据权利要求1所述的通信组件,其特征在于,多个所述通信件(111)插接于所述支撑基座(121)内。
12.一种电气箱,其特征在于,包括箱体和如权利要求1-11任一项所述的通信组件;
13.一种手术机器人,其特征在于,包括如权利要求12任一项所述的电气箱(1)。
技术总结
本技术属于手术机器人技术领域,公开了一种通信组件、电气箱及手术机器人。解决了现有的手术机器人的电气箱内通信组件占据较大空间的问题。一种通信模组,包括通信模组和支撑架;通信模组包括多个通信件,多个所述通信件能够提供多类通信容量模式;支撑架包括支撑基座;支撑基座包括安装通槽,安装通槽的一端配置有限位部,多个通信件的较大横截面能够自安装通槽的另一端垂直安装于支撑基座,限位部能够对通信件进行限位,且多个通信件的两连接端均能通过安装通槽的两端与外部走线连接。通过将多个通信件的较大横截面竖直安装于支撑基座的限位部,保证通信模组上下两端能与外部走线的同时实现通信模组的模块化,减少其占据较大空间的问题。
技术研发人员:李建民,荣德志,刘玉亮,董罡,王炳强,王树新
受保护的技术使用者:山东威高手术机器人有限公司
技术研发日:20240313
技术公布日:2025/3/13
- 还没有人留言评论。精彩留言会获得点赞!