一种用于双面探钩的校准工装的制作方法
本申请涉及机器人手术,尤其是涉及一种用于双面探钩的校准工装。
背景技术:
1、双面探钩是一种专门用于医疗手术的器械,通常具有特定的形状和功能,以适应不同的手术需求,主要用途包括探测并捕获人体创口内断裂的骨头或其他组织,并在手术过程中进行精细操作。
2、参照图1,双面探钩包括参考架1,参考架1包括参考座2,参考座2上设置有参考套3,参考套3的外缘一体成型分别设置有第一定位块4和第二定位块5,第一定位块4上开设有第一定位槽6,第二定位块5上开设有第二定位槽7,参考座2上开设有两个参考槽8、一个预留定位槽9和一个底部定位槽10,参考套3背离参考座2的一端通过插销连接有钩体11。在现有手术过程中,双面探钩通过机器人的机械臂与患者的脊柱结构接触进行手术操作,要求钩体11端部与所接触物的同心度偏移范围在0.03mm以内。
3、上述利用机器人操纵双面探钩进行手术的方式,对双面探钩的钩体与所接触物的同心度尺寸精度要求高,若同心度尺寸精度要求没满足,手术操作易出现偏差或误差,在手术过程中可能会误伤脊柱周围神经,影响手术效果的同时增加手术风险。
技术实现思路
1、为了有助于解决现有机器人手术中双面探钩的钩体与所接触物之间的定位精度难以确定,同心度易出现偏差的问题,本申请提供的一种用于双面探钩的校准工装,采用如下的技术方案:包括底座,参考座架设在所述底座上,所述底座上设有用于固定参考座的第一固定单元,所述底座上设有校准块,所述校准块上开设有校准孔,所述校准孔内设有与校准孔相匹配的检测杆,所述检测杆位于钩体的一侧且检测杆朝向钩体的一端与钩体接触。
2、通过上述技术方案,当需要检测双面探钩的钩体与接触物的同心度尺寸精度时,以检测杆为接触物的参照,操作人员将双面探钩的参考座利用第一固定单元安装在底座上,从而实现对双面探钩的固定,此时双面探钩的钩体位于校准块的一侧,随后将检测杆穿设过校准孔,使检测杆朝向钩体的端面中心处与钩体朝向检测杆的一端接触,检测钩体背离参考座的端部与检测杆的同心度是否在需求范围内,若出现偏差,拆卸双面探钩的钩体微调并重新安装,直到钩体朝向检测杆的一端与检测杆的同心度在需求范围内。通过控制双面探针的钩体与检测杆之间的同心度,减少机器人的机械臂与患者的脊柱结构接触时,双面探钩出现偏差的可能性,减少手术风险的同时提高手术精确度和手术效果。
3、在一个具体的可实施方案中,所述第一固定单元包括设置在底座上且与两个参考槽分别匹配的底部定位柱,两个所述底部定位柱分别部分穿设在两个参考槽内。
4、通过上述技术方案,两个底部定位柱均穿设在参考座的参考槽内,限制参考座的自由运动度,从而限制参考架整体的位置,确保参考架与底座的相对位置固定,减少参考架偏移的可能性,提高了参考架安装在底座上的稳定性。
5、在一个具体的可实施方案中,所述底座上穿设有与底部定位槽相匹配的第一固定螺丝,所述第一固定螺丝朝向参考座的一端螺纹连接在底部定位槽内。
6、通过上述技术方案,第一固定螺丝与底部定位槽螺纹连接,进一步减少了参考座晃动的可能性,提高了参考座与底座相连的稳定性。
7、在一个具体的可实施方案中,所述底座上设有用于固定参考套的第二固定单元,所述第二固定单元包括设置在底座上的安装座,所述安装座上穿设有与第一定位槽相匹配的第二固定螺丝,所述第二固定螺丝朝向参考套的一端螺纹连接在第一定位槽内,所述底座上穿设有与第二定位槽相匹配的第三固定螺丝,所述第三固定螺丝朝向参考套的一端螺纹连接在第二定位槽内。
8、通过上述技术方案,第二固定螺丝与第一定位槽螺纹连接,第三固定螺丝与第二定位槽螺纹连接,减少了参考套位置偏移的可能性,提高了参考套与底座相连的稳定性,进一步提高了钩体与检测杆之间同心度定位尺寸的精确度。
9、在一个具体的可实施方案中,所述校准块包括设置在底座上的固定块,所述固定块背离底座的面上设有支撑块,所述支撑块朝向钩体方向倾斜设置且校准孔设置于支撑块上。
10、通过上述技术方案,支撑块朝向钩体方向倾斜设置便于检测杆与钩体端部接触的同时,便于操作人员检测过程中对检测杆与钩体位置进行观测。
11、在一个具体的可实施方案中,所述检测杆朝向钩体的一端设有环弧形倒角。
12、通过上述技术方案,环弧形倒角的设计能够减少尖锐边角对操作人员的伤害风险,同时减少检测杆的锐边划伤钩体端部或两者干涉的可能性。
13、在一个具体的可实施方案中,所述检测杆背离钩体的一端设有拿取柱。
14、通过上述技术方案,操作人员可以利用拿取柱轻松便携得从校准孔内取放检测杆,灵活性更强的同时便于更换不同型号的检测杆。
15、在一个具体的可实施方案中,所述底座上朝向参考座的面上开设有沉料孔,参考座部分位于所述沉料孔的内缘。
16、通过上述技术方案,沉料孔对参考座的位置进行粗略限位的同时,降低了参考座相对于底座的高度,提高了参考座放置的稳定性。
17、在一个具体的可实施方案中,所述底座背离参考座的面上开设有若干避让槽。
18、通过上述技术方案,避让槽减轻了底座的重量,同时为操作人员转动第一固定螺丝、第二固定螺丝和第三固定螺丝留出空间,便于操作。
19、在一个具体的可实施方案中,所述底座上螺栓连接有预留块,所述预留块上穿设有与预留定位槽相匹配的安装螺栓,所述安装螺栓朝向参考座的一端螺纹连接在预留定位槽内。
20、通过上述技术方案,操作人员可以利用螺栓拆卸的方式从底座上拆卸下预留块,灵活性更强,安装螺栓朝向参考座的一端螺纹连接在预留定位槽内,进一步减少了参考座晃动的可能性,提高了参考座的稳定性。
21、综上所述,本申请具有以下有益技术效果:当需要检测双面探钩的钩体与接触物的同心度尺寸精度时,以检测杆为接触物的参照,操作人员将双面探钩的参考座利用第一固定单元安装在底座上,从而实现对双面探钩的固定,此时双面探钩的钩体位于校准块的一侧,随后将检测杆穿设过校准孔,使检测杆朝向钩体的端面中心处与钩体朝向检测杆的一端接触,检测钩体背离参考座的端部与检测杆的同心度是否在需求范围内,若出现偏差,拆卸双面探钩的钩体微调并重新安装,直到钩体朝向检测杆的一端与检测杆的同心度在需求范围内。通过控制双面探针的钩体与检测杆之间的同心度,减少机器人的机械臂与患者的脊柱结构接触时,双面探钩出现偏差的可能性,减少手术风险的同时提高手术精确度和手术效果。
技术特征:
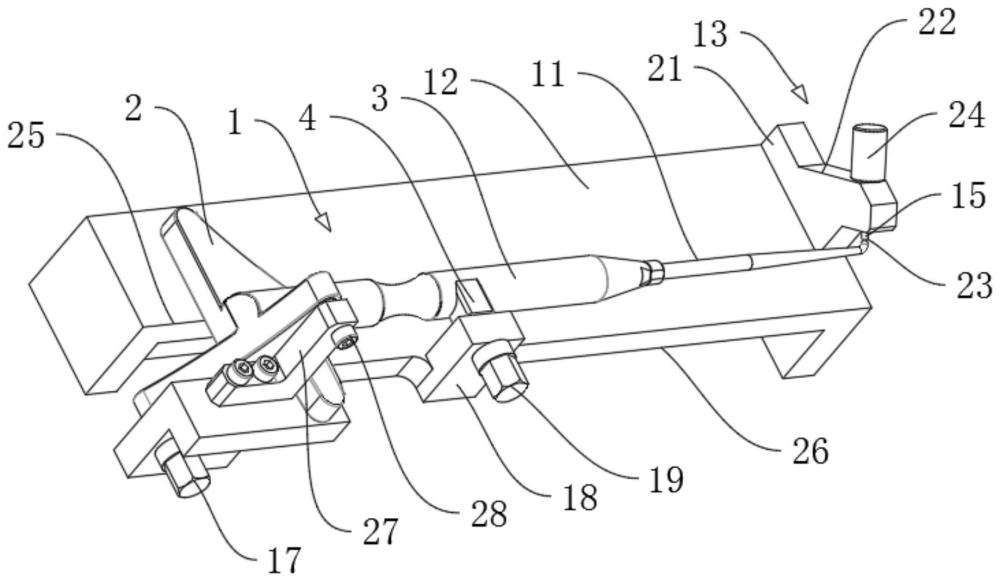
1.一种用于双面探钩的校准工装,其特征在于:包括底座(12),参考座(2)架设在所述底座(12)上,所述底座(12)上设有用于固定参考座(2)的第一固定单元,所述底座(12)上设有校准块(13),所述校准块(13)上开设有校准孔(14),所述校准孔(14)内设有与校准孔(14)相匹配的检测杆(15),所述检测杆(15)位于钩体(11)的一侧且检测杆(15)朝向钩体(11)的一端与钩体(11)接触。
2.根据权利要求1所述的用于双面探钩的校准工装,其特征在于:所述第一固定单元包括设置在底座(12)上且与两个参考槽(8)分别匹配的底部定位柱(16),两个所述底部定位柱(16)分别部分穿设在两个参考槽(8)内。
3.根据权利要求1所述的用于双面探钩的校准工装,其特征在于:所述底座(12)上穿设有与底部定位槽(10)相匹配的第一固定螺丝(17),所述第一固定螺丝(17)朝向参考座(2)的一端螺纹连接在底部定位槽(10)内。
4.根据权利要求1所述的用于双面探钩的校准工装,其特征在于:所述底座(12)上设有用于固定参考套(3)的第二固定单元,所述第二固定单元包括设置在底座(12)上的安装座(18),所述安装座(18)上穿设有与第一定位槽(6)相匹配的第二固定螺丝(19),所述第二固定螺丝(19)朝向参考套(3)的一端螺纹连接在第一定位槽(6)内,所述底座(12)上穿设有与第二定位槽(7)相匹配的第三固定螺丝(20),所述第三固定螺丝(20)朝向参考套(3)的一端螺纹连接在第二定位槽(7)内。
5.根据权利要求1所述的用于双面探钩的校准工装,其特征在于:所述校准块(13)包括设置在底座(12)上的固定块(21),所述固定块(21)背离底座(12)的面上设有支撑块(22),所述支撑块(22)朝向钩体(11)方向倾斜设置且校准孔(14)设置于支撑块(22)上。
6.根据权利要求1所述的用于双面探钩的校准工装,其特征在于:所述检测杆(15)朝向钩体(11)的一端设有环弧形倒角(23)。
7.根据权利要求1所述的用于双面探钩的校准工装,其特征在于:所述检测杆(15)背离钩体(11)的一端设有拿取柱(24)。
8.根据权利要求1所述的用于双面探钩的校准工装,其特征在于:所述底座(12)上朝向参考座(2)的面上开设有沉料孔(25),参考座(2)部分位于所述沉料孔(25)的内缘。
9.根据权利要求1所述的用于双面探钩的校准工装,其特征在于:所述底座(12)背离参考座(2)的面上开设有若干避让槽(26)。
10.根据权利要求1所述的用于双面探钩的校准工装,其特征在于:所述底座(12)上螺栓连接有预留块(27),所述预留块(27)上穿设有与预留定位槽(9)相匹配的安装螺栓(28),所述安装螺栓(28)朝向参考座(2)的一端螺纹连接在预留定位槽(9)内。
技术总结
本申请涉及一种用于双面探钩的校准工装,应用在机器人手术领域,包括底座,参考座架设在所述底座上,所述底座上设有用于固定参考座的第一固定单元,所述底座上设有校准块,所述校准块上开设有校准孔,所述校准孔内设有检测杆,所述检测杆位于钩体的一侧且检测杆朝向钩体的一端与钩体接触。本申请具有的技术效果是:通过控制双面探针的钩体与检测杆之间的同心度,减少机器人的机械臂与患者的脊柱结构接触时,双面探钩出现偏差的可能性,减少手术风险的同时提高手术精确度和手术效果。
技术研发人员:张桂华,郭健
受保护的技术使用者:无锡拓智精密科技有限公司
技术研发日:20240429
技术公布日:2025/4/6
- 还没有人留言评论。精彩留言会获得点赞!