一种妇科机器人手术系统的制作方法
本技术属于妇科疾病治疗,更具体涉及一种妇科机器人手术系统。
背景技术:
1、目前医院在妇科阴道疾病治疗方面,传统式的治疗方法基本上是医生手持射频能量触头,进入阴道,启动射频能量,设定好射频功率和固定的温度值,然后医生根据个人经验手持能量触头在阴道腔内沿着阴道内壁进行简单的线性往复移动,时间持续半小时左右来实现治疗的目的。这样就带来几点不足:
2、1.必须占用一名有经验的医生;
3、2.医生在治疗过程中,使用的力度、速度和触头角度因人而异,不能进行精细的量化控制;
4、3.医生在治疗的过程中,会有注意力集中程度和疲劳等弊端;
5、4.也因第2、3点原因,导致患者治疗过程中的舒适度和体验感减弱,同时也影响治疗效果。
技术实现思路
1、本实用新型的目的是在于提供了一种妇科机器人手术系统,结构简单,使用方便,在治疗的整个过程中保持一个稳定的状态,让患者有一个良好的舒适度和体验感,达到了一个安全、理想的治疗效果。完全克服了医生人工操作治疗的不足。
2、为实现上述目的,本实用新型采用以下技术措施:
3、一种妇科机器人手术系统,包括射频主机、控制器和末端安装有力控传感器、温度传感器、射频触头的机械臂,所述射频主机为射频能量发生器,所述力控传感器分别与射频触头以及机械臂连接,所述机械臂和射频能量发生器连接在控制器的控制输出端,所述控制器的控制输入端与力控传感器、温度传感器电性连接,所述机械臂在力控传感器、温度传感器和控制器的软件控制下使得射频触头形成治疗轨迹,所述治疗轨迹包括线性往复运动、螺旋往复运动、扇形运动,所述射频触头进入妇科阴道后,所述射频触头发射射频能量作用于妇科阴道内腔表面组织。
4、在传统的射频能量发生器和射频触头之间增加了所述的机械臂的运动动作,替代了医生的人工操作,节省出了宝贵的医疗资源。结合规模化的应用也会降低医疗费用,从而减轻患者的经济负担。
5、所述的控制器的控制输入端与力控传感器、温度传感器电性连接,由软件对治疗的力度、温度进行精密计算,规划出最优的治疗轨迹路径,以最舒适的力度和角度进行治疗。力控传感器、温度传感器能够实现力的感知和温度的感知,能够检测到力和温度的数据信号,然后通过控制器反馈控制机械臂、射频主机、射频能量发生器和射频触头调整治疗轨迹、力度和温度;从而使得整个治疗过程能够进行精确的量化控制。相对现有的人工治疗:1、避免了人工治疗过程参数不能量化,只能凭经验的不确定性;2、避免了不同医生因经验不同导致的治疗效果的差异性;3、避免了一个医生因注意力集中程度和疲劳程度的不同导致治疗效果的差异性;4、让患者有一个良好的舒适度和体验感,从而达到一个安全、理想的治疗效果。
6、所述机械臂在力控传感器、温度传感器和控制器的软件控制下使得射频触头形成治疗轨迹,所述治疗轨迹包括线性往复运动、螺旋往复运动、扇形运动,多轨迹符合运用。相对于人工治疗的单一动作,能够达到了一个理想的治疗效果。
7、较佳的,所述力控传感器为六轴力控传感器。
8、较佳的,所述机械臂安装在台车上。
9、与现有技术相比,本实用新型的有益效果是:
10、一种由末端安装有力传感器、温度传感器、射频触头的机械臂代替医生操作,由软件对治疗的力度、温度进行精密计算,规划出最优的治疗轨迹路径,以最舒适的力度和角度进行治疗。力控传感器、温度传感器能够实现力的感知和温度的感知,能够检测到力和温度的数据信号,然后通过控制器反馈控制机械臂、射频主机、射频能量发生器和射频触头调整治疗轨迹、力度和温度;同时在治疗的整个过程中保持一个稳定的状态,让患者有一个良好的舒适度和体验感,从而达到最安全、最理想的治疗效果。完全克服了医生人工操作治疗的不足。
技术特征:
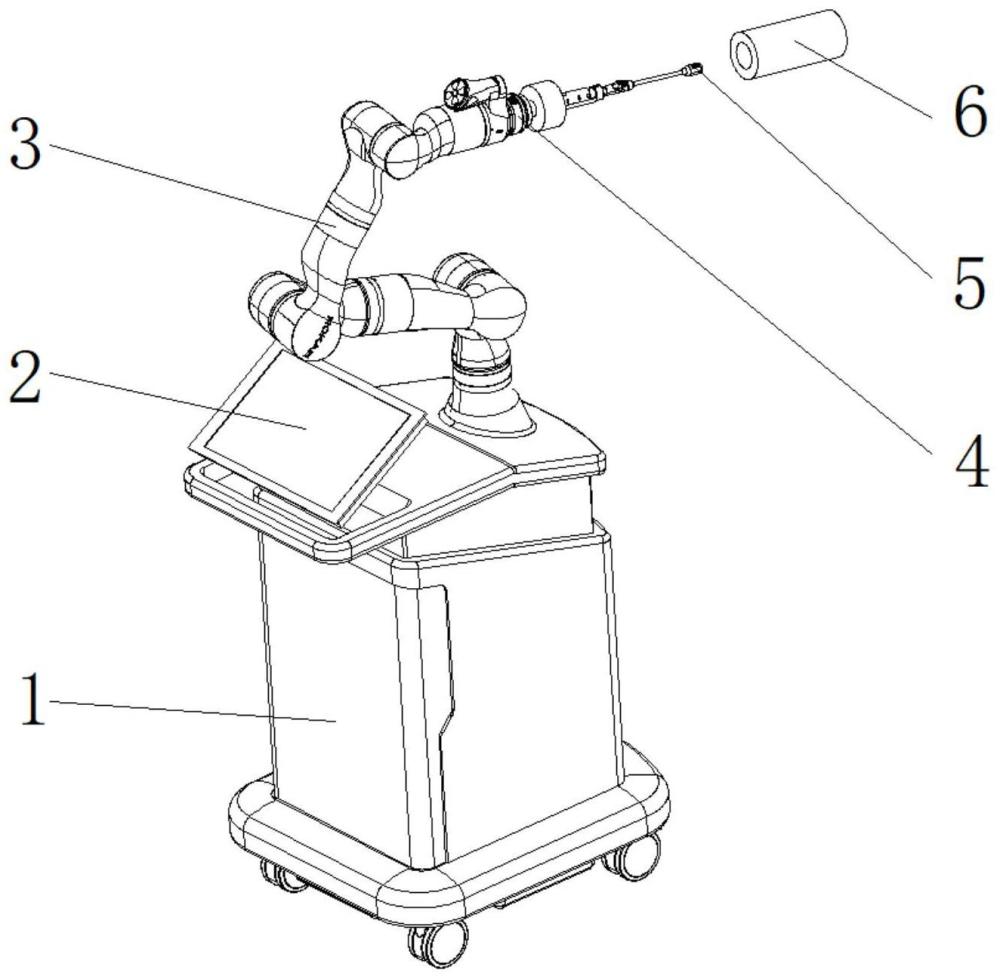
1.一种妇科机器人手术系统,其特征在于:包括射频主机、控制器(2)和末端安装有力控传感器(4)、温度传感器、射频触头(5)和机械臂(3),所述射频主机为射频能量发生器(7),所述力控传感器(4)分别与射频触头以及机械臂(3)连接,所述机械臂(3)和射频能量发生器(7)连接在控制器(2)的控制输出端,所述控制器(2)的控制输入端与力控传感器(4)、温度传感器电性连接。
2.根据权利要求1所述的一种妇科机器人手术系统,其特征在于:所述力控传感器(4)为六轴力控传感器。
3.根据权利要求1所述的一种妇科机器人手术系统,其特征在于:所述机械臂(3)安装在台车(1)上。
4.根据权利要求1所述的一种妇科机器人手术系统,其特征在于:所述机械臂(3)端部设置有双目内窥镜视觉系统,所述双目内窥镜视觉系统包括图像采集与处理模块和三维显示系统,所述三维显示系统同安装在机械臂(3)上的电子显示屏显示。
5.根据权利要求1所述的一种妇科机器人手术系统,其特征在于:所述控制器(2)连接有虚拟仿真控制系统,所述虚拟仿真控制系统包括仿真操作管理器和仿真操作记录仪,所述仿真操作管理器包括操作步骤输入模块和操作实施模块,仿真操作记录仪用于记录操作事宜。
6.根据权利要求5所述的一种妇科机器人手术系统,其特征在于:所述仿真操作管理器包括反馈模块,所述反馈模块反馈的信息包括运动控制信息、位置反馈信息、视觉反馈信息、力反馈信息,所述反馈模块连接有虚拟环境生成机。
技术总结
本技术公开了一种妇科机器人手术系统,包括射频主机、控制器和末端安装有力控传感器、温度传感器、射频触头的机械臂,所述射频主机为射频能量发生器,所述力控传感器分别与射频触头以及机械臂连接,所述机械臂和射频能量发生器连接在控制器的控制输出端,所述控制器的控制输入端与力控传感器、温度传感器电性连接,所述机械臂在力控传感器、温度传感器和控制器的软件控制下使得射频触头形成治疗轨迹,所述治疗轨迹包括线性往复运动、螺旋往复运动、扇形运动。本技术可对治疗的力度、温度进行精密计算,规划出最优的治疗轨迹路径,以最舒适的力度和角度进行治疗。
技术研发人员:邱学文,陈重阳,贺越,唐文杰,刘飞鸽
受保护的技术使用者:武汉半边天医疗技术发展有限公司
技术研发日:20240529
技术公布日:2025/4/7
- 还没有人留言评论。精彩留言会获得点赞!