用于胃肠道内永磁体目标的定位系统及方法
本申请涉及应用于生物医学和虚拟现实领域中的磁场定位,具体涉及一种用于胃肠道内永磁体目标的定位系统及方法。
背景技术:
1、随着微型化技术和无线通信技术的飞速发展,微型设备(例如无线胶囊内镜)在胃肠道内的应用逐渐成为医疗研究和临床实践中的重要课题。无线胶囊内镜是一种便携、非侵入性的医疗设备,能够在胃肠道内部进行图像采集和监测。然而,这种设备在体内的精确定位和导航依然面临许多挑战,这对其诊断效果和使用便利性至关重要。
2、现有技术中,胃肠道内的定位方法例如是:无线电信号定位技术:无线电信号定位技术通过在体内或体外布置接收器来定位胶囊。然而,由于无线电信号在体内传播时受到组织和液体的强烈衰减,这种方法的准确性和可靠性受到限制,这导致胃肠道内的定位精度较差。
3、基于此,需要一种新技术方案。
技术实现思路
1、有鉴于此,本申请提供一种用于胃肠道内永磁体目标的定位系统及方法。
2、本申请提供以下技术方案:
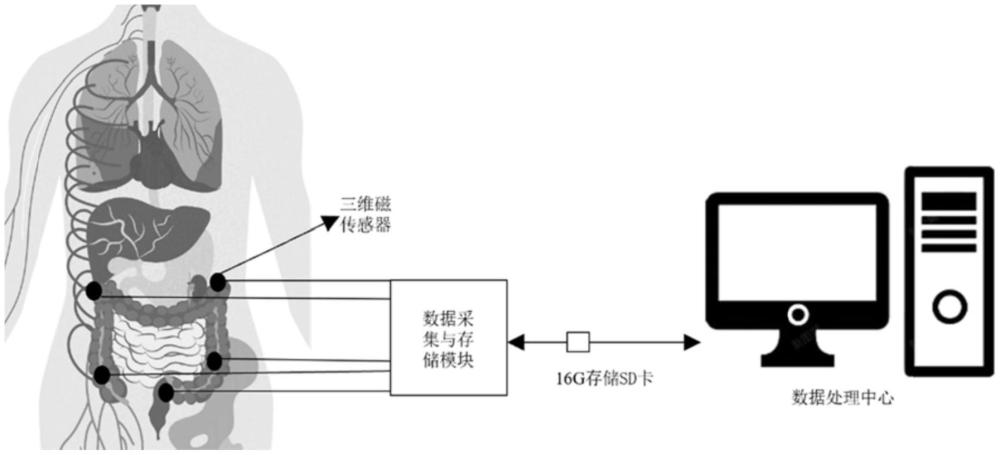
3、根据本申请提供的一种用于胃肠道内永磁体目标的定位系统,包括磁源、磁传感器阵列以及处理模块;
4、所述磁源用于产生磁场;
5、所述磁传感器阵列用于测量空间中的磁场强度;
6、所述处理模块采集磁场强度数据,进而基于磁偶极子模型和磁矩理论,利用磁源的磁矩和磁场强度数据,进行目标的空间位置与方位计算。
7、优选的,所述处理模块包括控制单元、存储单元和数据处理单元;
8、所述磁传感器阵列包括多个安装在空间坐标位置的霍尔效应磁传感器,多个所述霍尔效应磁传感器用于分别测量不同空间坐标位置的磁场强度分量;
9、所述控制单元同步采集磁场强度数据,并将采集的磁场强度数据进行模拟信号到数字信号的转换;
10、所述存储模块存储转换为数字信号的磁场强度数据;
11、所述数据处理单元基于磁偶极子模型和磁矩理论计算目标的三维空间位置与方位角。
12、优选的,所述磁源包括至少一个永磁铁;所述永磁铁的磁偶极矩矢量的方向和大小用于计算目标的方位和位置;
13、所述磁场强度分量用于反推磁源的位置和磁偶极矩方向。
14、优选的,所述数据处理单元基于磁场反演算法,通过最小化测量数据与磁偶极子模型预测数据之间的误差,迭代求解磁源的空间位置及姿态信息。
15、优选的,所述数据处理单元利用磁偶极子模型表达空间任意点的磁场,推导目标物体的三维位置;
16、其中,利用磁偶极子模型,磁场在空间任意点的表达式为:
17、
18、为距离的单位矢量;m为磁偶极矩;为磁偶极子到传感器的距离;表示距离的向量;s=(x,y,z)是传感器的空间坐标;x、y、z分别为传感器空间上的三个坐标值;b为磁场强度;μ0真空磁导率。
19、优选的,所述数据处理单元通过误差函数来最小化磁传感器阵列实测磁场值与理论预测值之间的偏差,计算出目标的三维位置和方位;
20、其中,定义误差函数来度量磁传感器阵列实际测得的磁场bi与理论预测的磁场之间的偏差:
21、
22、磁偶极矩m=(a,b,c)为目标的方位;a、b、c分别代表永磁体磁化方向在三个坐标轴的投影分量;n表示磁传感器的数量;e表示偏差值。
23、本说明书实施例还提供了一种用于胃肠道内永磁体目标的定位方法,应用上述任一所述的用于胃肠道内永磁体目标的定位系统,包括如下步骤:
24、数据测量步骤:通过磁传感器阵列测量空间中的磁场强度;
25、处理步骤:采集磁场强度数据,进而基于磁偶极子模型和磁矩理论,利用磁源的磁矩和磁场强度数据,进行目标的空间位置与方位计算。
26、优选的,所述处理步骤包括如下步骤:
27、控制处理步骤:同步采集磁场强度数据,并将采集的磁场强度数据进行模拟信号到数字信号的转换;
28、存储步骤:存储转换为数字信号的磁场强度数据;
29、数据处理步骤:基于磁偶极子模型和磁矩理论计算目标的三维空间位置与方位角。
30、优选的,在所述数据处理步骤中,基于磁场反演算法,通过最小化测量数据与磁偶极子模型预测数据之间的误差,迭代求解磁源的空间位置及姿态信息。
31、优选的,所述数据处理步骤包括:利用磁偶极子模型表达空间任意点的磁场,推导目标物体的三维位置;
32、其中,利用磁偶极子模型,磁场在空间任意点的表达式为:
33、
34、为距离的单位矢量;m为磁偶极矩;为磁偶极子到传感器的距离;表示距离的向量;s=(x,y,z)是传感器的空间坐标;x、y、z分别为传感器空间上的三个坐标值;b为磁场强度;μ0真空磁导率;
35、通过误差函数来最小化磁传感器阵列实测磁场值与理论预测值之间的偏差,计算出目标的三维位置和方位;
36、其中,定义误差函数来度量磁传感器阵列实际测得的磁场bi与理论预测的磁场之间的偏差:
37、
38、磁偶极矩m=(a,b,c)为目标的方位;a、b、c分别代表永磁体磁化方向在三个坐标轴的投影分量;n表示磁传感器的数量;e表示偏差值。
39、与现有技术相比,本申请采用的上述至少一个技术方案能够达到的有益效果至少包括:
40、本申请通过创新的磁场感应技术和磁偶极子模型,以解决现有技术中,胃肠道内电子胶囊的定位存在精度不足、受外部干扰较大以及姿态信息难以获取,无法满足现代医疗中对精准诊疗的需求等问题,能够实现对胃肠道内永磁体目标定位。
技术特征:
1.一种用于胃肠道内永磁体目标的定位系统,其特征在于,包括磁源、磁传感器阵列以及处理模块;
2.根据权利要求1所述的用于胃肠道内永磁体目标的定位系统,其特征在于,所述处理模块包括控制单元、存储单元和数据处理单元;
3.根据权利要求2所述的用于胃肠道内永磁体目标的定位系统,其特征在于,所述磁源包括至少一个永磁铁;所述永磁铁的磁偶极矩矢量的方向和大小用于计算目标的方位和位置;
4.根据权利要求2所述的用于胃肠道内永磁体目标的定位系统,其特征在于,所述数据处理单元基于磁场反演算法,通过最小化测量数据与磁偶极子模型预测数据之间的误差,迭代求解磁源的空间位置及姿态信息。
5.根据权利要求4所述的用于胃肠道内永磁体目标的定位系统,其特征在于,所述数据处理单元利用磁偶极子模型表达空间任意点的磁场,推导目标物体的三维位置;
6.根据权利要求5所述的用于胃肠道内永磁体目标的定位系统,其特征在于,所述数据处理单元通过误差函数来最小化磁传感器阵列实测磁场值与理论预测值之间的偏差,计算出目标的三维位置和方位;
7.一种用于胃肠道内永磁体目标的定位方法,其特征在于,应用权利要求1~6任一所述的用于胃肠道内永磁体目标的定位系统,包括如下步骤:
8.根据权利要求7所述的用于胃肠道内永磁体目标的定位方法,其特征在于,所述处理步骤包括如下步骤:
9.根据权利要求8所述的用于胃肠道内永磁体目标的定位方法,其特征在于,在所述数据处理步骤中,基于磁场反演算法,通过最小化测量数据与磁偶极子模型预测数据之间的误差,迭代求解磁源的空间位置及姿态信息。
10.根据权利要求9所述的用于胃肠道内永磁体目标的定位方法,其特征在于,所述数据处理步骤包括:利用磁偶极子模型表达空间任意点的磁场,推导目标物体的三维位置;
技术总结
本申请提供一种用于胃肠道内永磁铁目标的定位系统及方法,包括磁源、磁传感器阵列以及处理模块;所述磁源用于产生磁场;所述磁传感器阵列用于测量空间中的磁场强度;所述处理模块采集磁场强度数据,进而基于磁偶极子模型和磁矩理论,利用磁源的磁矩和磁场强度数据,进行目标的空间位置与方位计算。本申请通过创新的磁场感应技术和磁偶极子模型,以解决现有技术中,胃肠道内电子胶囊的定位存在精度不足、受外部干扰较大以及姿态信息难以获取,无法满足现代医疗中对精准诊疗的需求等问题,能够实现对胃肠道内永磁体目标定位。
技术研发人员:崔柳,王双魁
受保护的技术使用者:上海应用技术大学
技术研发日:
技术公布日:2025/4/7
- 还没有人留言评论。精彩留言会获得点赞!