用于游乐园景观的间隙阻挡系统和方法与流程
用于游乐园景观的间隙阻挡系统和方法
1.对相关申请的交叉引用本技术要求于2019年3月31日提交的题为“fall hazard prevention systems for amusement park attractions(用于游乐园景观的掉落危险预防系统)”的第62/827,144号美国临时申请、于2019年5月17日提交的题为“fall hazard prevention systems for amusement park attractions(用于游乐园景观的掉落危险预防系统)”的第62/849,542号美国临时申请、以及于2019年6月7日提交的题为“fall hazard prevention systems for amusement park attractions(用于游乐园景观的掉落危险预防系统)”的第62/858,663号美国临时申请的优先权和权益,这些申请以其整体出于所有目的通过引用特此并入。
背景技术:
2.本公开总体上涉及用于游乐园的游乐园乘坐系统。更特别地,本公开的实施例涉及用于阻挡对某些游乐园乘坐系统中的间隙的接近的系统和方法。
3.本部分旨在向读者介绍可能与下面描述和/或要求保护的本公开的各个方面相关的本领域的各个方面。本讨论被认为有助于向读者提供背景信息,以便于对本公开的各个方面的更好的理解。因此,应当理解,这些陈述要从这个角度来阅读,而不是作为对现有技术的承认。
4.近来,在提高将乘客(例如,客人)装载到游乐园的景观的乘坐运载器中的效率方面已经存在增长的兴趣。因此,一些景观可以包括具有装载平台的装载系统,该装载平台准许乘客在乘坐运载器沿着装载路径移动时从乘坐运载器卸载和/或装载到乘坐运载器中。沿着装载平台的某些位置通常用障碍物(例如,栏杆)永久阻挡,以防止客人移动出装载平台并移动到例如景观的轨道或客人不应该在的另一位置上。沿着装载平台的其他位置可以包括未覆盖的间隙,其不能用障碍物永久阻挡。例如,这样的未覆盖的间隙通常准许乘坐运载器和/或推进乘坐运载器的部件沿着装载路径行进而不与装载平台干涉。然而,从乘坐运载器装载/卸载的乘客和/或跨装载平台行走的其他客人可能在沿着装载平台的这样的未覆盖的间隙中丢失物品。
技术实现要素:
5.下面概述了在范围上与本公开相称的某些实施例。这些实施例不旨在限制本公开的范围,而是这些实施例旨在仅提供某些公开的实施例的简要概述。实际上,本公开可以涵盖可以与下面阐述的实施例类似或不同的各种形式。
6.在实施例中,间隙阻挡系统包括装载平台,该装载平台具有将装载平台的第一部分从装载平台的第二部分分开的间隙。乘坐运载器耦联到延伸穿过间隙的运输工具,其中运输工具被配置为沿着邻近装载平台的装载路径推进乘坐运载器。间隙阻挡系统还包括护栏组件,护栏组件具有多个护栏单元,该多个护栏单元耦联到装载平台的第一部分并且被配置为在第一位置和第二位置之间转换,其中多个护栏单元被配置为当在第一位置中时阻挡对间隙的接近。乘坐运载器包括接合特征,该接合特征被配置为与多个护栏单元中的单
独的护栏单元连接,以选择性地将单独的护栏单元从第一位置转换到第二位置。单独的护栏单元被配置为在第二位置中准许乘坐运载器占据邻近装载平台或在装载平台上的客人能够接近的位置。
7.在实施例中,间隙阻挡系统包括装载平台,该装载平台具有将装载平台的第一部分从装载平台的第二部分分开的间隙。乘坐运载器耦联到延伸穿过间隙的运输工具,其中运输工具被配置为沿着装载平台的装载路径推进乘坐运载器。间隙阻挡系统包括耦联到装载平台的板件组件。板件组件包括多个板件,其中多个板件中的每个板件耦联到相应致动器,该相应致动器被配置为将板件在第一位置和第二位置之间选择性地转换。多个板件中的每个板件被配置为在第一位置中阻挡对间隙的部分的接近,并且多个板件中的每个板件被配置为在第二位置中暴露间隙的部分,以准许乘坐运载器占据在装载平台上或邻近装载平台的客人能够接近的位置。在客人能够接近的位置中,乘坐运载器跨间隙的径向尺寸延伸以阻挡对间隙的部分的接近。
8.在实施例中,一种操作用于游乐园景观的间隙阻挡系统的方法包括经由多个致动器将装载平台的多个板件转换到延伸位置,以覆盖装载平台的间隙,以阻挡对间隙的接近。该方法还包括检测从乘坐轨道靠近装载平台的乘坐运载器在间隙的阈限距离内。该方法还包括经由致动器中的至少一个将多个板件中的对应板件转换到缩回位置以暴露间隙的部分,以准许乘坐运载器进入间隙并占据沿着装载平台的客人能够接近的位置,其中乘坐运载器的底盘在客人能够接近的位置中与间隙的径向尺寸重叠以阻挡对间隙的部分的接近。
附图说明
9.当参考所附附图阅读以下详细描述时,本公开的这些和其他特征、方面和优点将变得更好理解,在附图中,整个附图中相同的符号代表相同的部分,其中:图1是根据本公开的方面的乘坐系统的部分的实施例的示意性顶视图;图2是根据本公开的方面的乘坐系统的实施例的透视图;图3是根据本公开的方面的用于具有护栏组件的乘坐系统的转台的部分的实施例的透视图;图4是根据本公开的方面的用于具有护栏组件的乘坐系统的转台的部分的实施例的横截面侧视图;图5是根据本公开的方面的用于具有护栏组件的乘坐系统的转台的实施例的横截面侧视图;图6是根据本公开的方面的用于具有护栏组件的乘坐系统的装载系统的部分的实施例的示意性顶视图;图7是根据本公开的方面的用于具有护栏组件的乘坐系统的装载系统的部分的实施例的示意性顶视图;图8是根据本公开的方面的用于具有护栏组件的乘坐系统的装载系统的部分的实施例的示意性顶视图;图9是根据本公开的方面的用于具有致动板件组件的乘坐系统的装载系统的部分的实施例的示意性顶视图;图10是根据本公开的方面的用于乘坐系统的致动板件组件的板件阵列的实施例
的顶视图;以及图11是根据本公开的方面的用于具有致动板件组件的乘坐系统的装载系统的部分的实施例的顶视图。
具体实施方式
10.下面将描述本公开的一个或多个具体实施例。这些描述的实施例仅是当前公开的技术的示例。另外,为了提供这些实施例的简明描述,在说明书中可能没有描述实际实施方式的所有特征。应当领会,在任何这样的实际实施方式的开发中,如在任何工程或设计项目中,必须做出许多特定于实施方式的决策以实现开发者的具体目标,诸如符合系统相关和业务相关的约束,其可能随实施方式而变化。此外,应当领会,这样的开发工作可能是复杂且耗时的,但是对于受益于本公开的普通技术人员而言将仍然是设计、制作和制造的例行任务。
11.当介绍本公开的各种实施例的元素时,冠词“一”、“一个”和“该”旨在意指存在元素中的一个或多个。术语“包括”、“包含”和“具有”旨在是包含性的,并且意指可能存在除所列出的元素之外的附加元素。另外,应当理解,对本公开的“一个实施例”或“实施例”的引用不旨在被解释为排除也并入所述特征的附加实施例的存在。
12.某些游乐园景观可以包括装载系统,其准许乘客在乘坐运载器沿着装载系统行进时装载到景观的乘坐运载器中和/或从景观的乘坐运载器卸载。当乘坐运载器进入景观的装载区时,乘坐运载器可以减慢,但是在乘客离开运载器时并且当新乘客被装载到运载器上时,沿着轨道或路径继续以相对低的速度移动。该系统可以包括装载平台,该装载平台被配置为转台,或者如下面所讨论的,被配置为线性平台,其是静止的或者被配置为围绕轴线(例如,中央竖直轴线)旋转,运载器围绕该轴线移动。静止的外平台可以围绕转台的部分或基本上整个转台设置,以在转台和外平台之间形成间隙。间隙可以限定装载路径,在从乘坐运载器卸载和/或装载乘客期间,乘坐运载器可以沿着该装载路径行进。在一些实施例中,乘坐运载器可以以基本上等于转台的旋转速度的速度沿着装载路径行进。也就是说,乘坐运载器围绕轴线的旋转速度可以基本上匹配转台的旋转速度,使得乘坐运载器与转台之间的相对移动可以是基本上不可感知的。因此,转台的边缘可以相对于特定乘坐运载器的边缘基本上静止,以准许乘客登上乘坐运载器中或从乘坐运载器卸载,而无需在这样的装载/卸载过程期间沿着乘坐运载器行走以调节到乘坐运载器的速度。以这种方式,装载系统可以便于乘客到非静止乘坐运载器中的装载和卸载。然而,邻近乘坐运载器或以其他方式围绕乘坐运载器的间隙的部分可能准许乘客在间隙中丢失物品(例如,钥匙、硬币、便携电话)。
13.因此,本公开的实施例涉及间隙阻挡系统,该间隙阻挡系统被配置为阻挡对间隙的接近,而仍然准许乘坐运载器在装载系统的操作期间沿着间隙或在间隙内移动。例如,在一些实施例中,间隙阻挡系统包括围绕装载平台的周边设置的能够致动的护栏组件(例如,防护组件)。护栏组件包括多个护栏单元,每个护栏单元被配置为选择性地在延伸位置和缩回或撤回(subducted)位置之间转换,在延伸位置中护栏单元阻挡客人对间隙的接近,在缩回或撤回位置中护栏单元准许乘坐运载器占据沿着转台的客人能够接近的位置。在乘坐运载器的客人能够接近的位置中,乘坐运载器的相应底盘被配置为阻挡客人对间隙的接近。
因此,护栏单元可以被配置为阻挡客人对间隙的任何部分(其未已经被乘坐运载器占据并且经由乘坐运载器的部件(例如,乘坐运载器的相应底盘)阻挡客人接近)的接近。如本文中所讨论的,在一些实施例中,护栏单元可以被配置为响应于与乘坐运载器的特征的接合(例如,物理接触)而在相应的延伸位置和缩回位置之间转换。也就是说,在实施例中,乘坐运载器直接接触单独的护栏单元,以致使护栏单元从延伸位置移动到缩回位置。实际上,在一些实施例中,护栏组件可以是被动致动系统,其在不涉及专用致动器的使用的情况下能够操作以调节护栏单元。
14.本公开的实施例还涉及一种间隙阻挡系统,其包括能够致动的板件组件。板件组件被配置为选择性地阻挡平台(例如,装载转台)与外平台之间的间隙,以基本上消除或闭合可能存在的间隙,而仍然准许乘坐运载器在装载系统的操作期间沿着间隙行进。例如,板件组件包括多个板件,所述多个板件可以耦联到转台并且被配置为与转台一起围绕轴线旋转。板件可以与相应致动器相关联,致动器被配置为选择性地将板件从延伸位置转换到缩回位置,以解除阻挡(例如,不覆盖)间隙的部分(乘坐运载器沿着该部分定位)并且阻挡(例如,覆盖)未被乘坐运载器占据的间隙的其他部分。因此,板件系统可以准许乘坐运载器沿着装载系统行进,以在沿着转台的任何合适的位置处接收和/或卸载乘客,而客人对间隙的接近基本上被能够致动的板件阻挡。下面将参考附图描述这些和其他特征。
15.重要的是要注意,虽然本公开描述了如被配置供游乐园环境中使用的间隙阻挡系统(例如,能够致动的护栏组件、能够致动的板件组件)的实施例,但是应当领会,间隙阻挡系统的所公开的实施例可以被实施为选择性地阻挡对可能存在于各种工业环境中的各种间隙的接近。例如,本文中所讨论的间隙阻挡系统的实施例可用于阻挡对间隙的接近,该间隙可存在于各种传送机系统或用于沿着路径(例如,轨道)的移动部件的其他装置中。
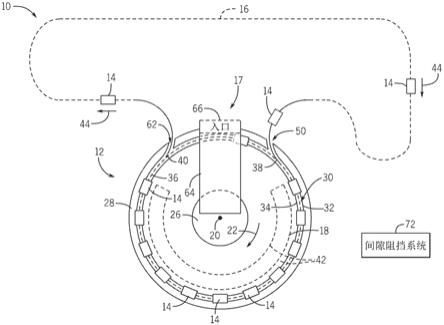
16.现在转到附图,图1是游乐园的乘坐系统10(例如,景观)的实施例的示意图。乘坐系统10包括装载系统12,装载系统12便于乘客(例如,游乐园的客人)到乘坐系统10的乘坐运载器14中的装载和/或卸载。例如,乘客可以在装载系统12处装载到乘坐运载器14中,可以沿着乘坐系统10的景观路径16行进,并且可以返回到达装载系统12处以从乘坐运载器14卸载。当沿着景观路径16行进时,乘客可以暴露于各种体验,诸如虚拟现实、替代现实、环境交互、多个乘坐路径、水特征、特效等。应当注意,乘坐系统10的部分(诸如景观路径16)已经被有意地简化以集中于装载系统12的方面。
17.在所描绘的实施例中,装载系统12包括具有转台18(例如,装载平台17的第一部分)的装载平台17,转台18被配置为围绕轴线20旋转(例如,以基本上恒定的旋转速度)。然而,应当理解,本文中公开的实施例也可以与不旋转的静止装载平台一起使用。在图示的实施例中,转台18是基本上圆形的并且围绕轴线20在顺时针方向22上旋转。然而,在其他实施例中,转台18可以是任何合适的形状,其可以对应于乘坐系统10的主题,并且可以围绕轴线20在逆时针方向上旋转。此外,在某些实施例中,转台18可以用带或其他轨道系统(例如,线性平台和相关联的轨道系统)代替,该带或其他轨道系统被配置为沿着线性路径或沿着另一预定路径(例如,非对称路径)行进。在一些实施例中,转台18可以包括设置在其中的静止部分26,该静止部分26不被配置为围绕轴线20旋转。也就是说,转台18可以包括总体上环形形状并且可以围绕静止部分26设置,使得转台18可以相对于静止部分26围绕轴线20旋转。
18.如图示实施例中所示,转台18至少部分地被外平台28(例如,装载平台17的第二部
分)限定(circumscribed),在一些实施例中,外平台28被配置为相对于轴线20保持静止。外平台28可以从转台18间隔开,使得在外平台28的内边缘32和转台18的外边缘34之间形成间隙30。景观路径16可以耦联到沿着间隙30并围绕轴线20延伸的装载路径36。特别地,装载路径36可以在留存的景观路径16的终端端部38和起始端部40之间沿着间隙30延伸。因此,装载路径36可以形成总体景观路径16的部分。如下面详细讨论的,乘客可以沿着装载路径36装载到乘坐运载器14中和/或从乘坐运载器14卸载。在时间中的特定实例处邻近装载路径36定位的转台18的部分将在本文中被称为装载系统12的装载区42(例如,装载区42可以表示由所图示的假想线勾勒出的转台18的区域)。
19.乘坐运载器14可以在行进方向44上沿着景观路径16行进。乘坐运载器14可以经由可以形成在外平台28内的进入通道50(例如,路径或过道)进入装载路径36。在一些实施例中,装载路径36围绕转台18的轴线20延伸(例如,装载路径36具有从轴线20延伸的半径)。因此,乘坐运载器14可以沿着装载路径36的长度连同转台18(即,与转台18一起或以与转台18相同的速度)行进。例如,当沿着装载路径36行进时,乘坐运载器14可以以与转台18围绕轴线20的旋转速度基本上相同的速度围绕轴线20行进。以这种方式,乘坐运载器14中的每个沿着转台18的装载区42的位置和取向可以保持基本上恒定。换句话说,每个乘坐运载器14可以在沿着装载路径36行进时以及在转台18围绕轴线20旋转时相对于转台18的周缘维持暂时固定的位置。以这种方式,当乘坐运载器14沿着装载路径36行进时,装载系统12可以基本上维持转台18相对于乘坐运载器14的取向,乘坐运载器14可以包括面向外边缘34的座椅。因此,乘客可以从装载区42登上乘坐运载器14中,或者可以从乘坐运载器14卸载到装载区42上,而无需在这样的装载/卸载过程期间沿着特定乘坐运载器14行走以调节到乘坐运载器14的速度。应当理解,在某些实施例中,乘坐运载器14沿着装载路径36的相应速度可以小于乘坐运载器14沿着景观路径16的其余部分的平均速度。在完成装载/卸载过程时,乘坐运载器14可以经由邻近景观路径16的起始端部40的出口通道62离开装载路径36。
20.如图示实施例中所示,入口坡道64可以在乘坐系统10的入口66与装载系统12的静止部分26之间延伸。在一些实施例中,入口坡道64可以是任何合适的成角度路径,其可以包括阶梯、基本上平坦的成角度表面、自动扶梯、或其任何组合。因此,当某些乘坐运载器14或装载系统12的其他移动部件围绕轴线20(例如,在入口坡道64下方)行进时,客人可以从入口66进入静止部分26(例如,行走到静止部分26上)。通常,客人可以从静止部分26迈步到转台18的装载区42上,并且随后登上沿着装载区42行进的乘坐运载器14中的特定一个中。应当理解,为了离开乘坐系统10,客人可以从乘坐运载器14卸下到装载区42上,朝向静止部分26行走,并且随后可以经由入口坡道64离开到装载系统12。
21.乘坐运载器14在基于轨道或无轨系统中沿着装载路径行进。在实施例中,沿着装载路径36行进的乘坐运载器14中的每个可以与相应的运输工具70相关联,如图2中所示,运输工具70被配置为沿着装载路径36并且围绕轴线20推进乘坐运载器14。在某些实施例中,运输工具70可以部分地设置在转台18和/或外平台28下方,并且可以经由延伸穿过间隙30的支撑结构耦联到特定乘坐运载器14。实际上,间隙30可以准许运输工具70耦联到对应的乘坐运载器14并且沿着装载路径36推进对应的乘坐运载器14。不幸的是,间隙30可能准许从乘坐运载器14装载和/或卸载或以其他方式邻近装载路径36行走的客人通过将物品掉落到间隙30中而意外地在间隙30中丢失某些物品(例如,钥匙、硬币、便携电话)。因此,本文中
所讨论的乘坐系统10的实施例配备有间隙阻挡系统72,间隙阻挡系统72被配置为基本上阻挡客人对间隙30的接近。更具体地,间隙阻挡系统72被配置为选择性地阻挡客人对未被乘坐运载器14的部件占据或以其他方式被乘坐运载器14覆盖(例如,被乘坐运载器14的相应底盘覆盖)的间隙30的部分的接近。因此,间隙阻挡系统72可以准许乘坐运载器14沿着装载路径36连续地移动,而基本上消除客人在间隙30中丢失物品的可能性。
22.为了更好地图示运输工具70并且为了便于随后讨论如连同运输工具70使用的间隙阻挡系统72,图2是装载系统12的实施例的透视图。如图示实施例中所示,运输工具70定位在转台18和/或外平台28下方的空间74中,并且与引导轨道76接合。引导轨道76可以围绕支撑转台18的框架78延伸,并且准许运输工具70围绕轴线20沿着引导轨道76推进。在一些实施例中,引导轨道76和装载路径36可以包括相同的路径或轨道结构。机器人操纵器80可以将运输工具70耦联到乘坐运载器14中的一个(在下文中称为乘坐运载器82),以准许运输工具70沿着装载路径36移动乘坐运载器82。如图示实施例中所示,机器人操纵器80可以包括延伸穿过间隙30并且与乘坐运载器82接合的支撑结构84(例如,轴)。因此,支撑结构84可以便于将乘坐运载器82耦联到定位在转台18和/或外平台28下方的运输工具70。为了清楚起见,应当理解,如本文中所使用的,“乘坐运载器”可以指代乘坐运载器82(例如,乘坐运载器14中的任何一个)、机器人操纵器80、和/或运输工具70的部件中的任何一个或组合。
23.图3是转台18的实施例的透视图,其图示了间隙阻挡系统72的实施例。例如,在一些实施例中,间隙阻挡系统72包括具有多个单独的护栏单元102的护栏组件100。护栏单元102围绕转台18的周缘定位并且耦联到转台18。为此,护栏单元102中的每个可以与转台18一起围绕轴线20旋转(例如,在顺时针方向22上)。如以下所讨论,护栏单元102被配置为阻挡(例如,阻碍)客人对间隙30的接近,而准许乘坐运载器14在装载系统12的操作期间沿着装载路径36行进。护栏单元102中的每个可以由一个或多个栏杆104(例如,管子)组装而成,栏杆104由铝、不锈钢、聚合物材料或其他合适的材料制成。
24.在实施例中,护栏单元102中的每个可以被配置为在相应的延伸位置106(例如,第一位置)和相应的缩回位置108(例如,第二位置)之间选择性地转换,如图5中所示。在延伸位置106中,护栏单元102可以接近转台18的外边缘34定位,并且可以被配置为相对于转台18的表面110总体上竖直地(例如,沿着轴线20)或正交地延伸出平面。因此,在延伸位置106中,护栏单元102可以阻挡(例如,阻碍)客人对间隙30的接近并且将客人限制到装载区42。也就是说,护栏单元102可以阻挡客人获得对间隙30的接近,并且因此减少或基本上消除客人在间隙30中丢失物品(例如,钥匙、硬币、便携电话)的可能性。如下面详细讨论的,护栏单元102中的每个可以被配置为沿着转台18的相应径向尺寸平移,以选择性地缩回(例如,撤回)在转台18下方以转换到缩回位置108。在缩回位置108中,护栏单元102准许乘坐运载器14占据沿着装载区42的客人能够接近的位置,以准许客人装载到特定乘坐运载器14中或从特定乘坐运载器14卸载。应当理解,当乘坐运载器14在沿着装载区42的客人能够接近的位置中时,乘坐运载器14的相应底盘或其他部件可阻挡客人对间隙30的接近。因此,护栏组件100可以被配置为特别地阻挡客人对未被乘坐运载器14本身阻挡或以其他方式阻碍的间隙30的部分的接近。护栏单元102可以被配置为独立于彼此致动,使得单独的护栏单元102的缩回不致使邻近护栏单元102的致动。
25.图4是装载系统12的部分的实施例的横截面侧视图,其图示了护栏单元102中的一
个,在下文中称为护栏单元114。在图示实施例中,护栏单元114在延伸位置106中,使得护栏单元114基本上邻近外边缘34定位并且总体上竖直地(例如,沿着平行于轴线20的轴线)延伸,以阻挡客人对间隙30的接近。然而,应当理解,护栏单元114也可以以一定角度延伸以与表面110形成锐角或钝角。在一些实施例中,护栏单元114可以包括多个栏杆区段116,栏杆区段116在相应的铰接点118处铰接地(例如,能够枢转地)耦联到彼此。如以下所讨论的,栏杆区段116准许护栏单元114在各种中间位置之间铰连(articulate),以便于护栏单元114撤回在转台18下方。
26.在一些实施例中,下栏杆区段120(例如,栏杆区段116的最下部)包括滚子组件122,滚子组件122被配置为与转台18的轨道组件123接合。轨道组件123可以设置在转台18下方(例如,耦联到转台18的下侧),并且可以被配置为与转台18一起围绕轴线20旋转。轨道组件123与滚子组件122接合,以维持护栏单元114相对于转台18的周向位置,而准许护栏单元114沿着转台18(例如,相对于轴线20)径向平移。如以下所讨论的,为此,轨道组件123可以准许护栏单元114选择性地在延伸位置106和缩回位置108之间转换。应当领会,滚子组件122可以包括一个或多个轴承、衬套、轮或脚轮、聚合物垫、或准许滚子组件122与轨道组件123接合并沿着轨道组件123平移的任何其他合适的装置或组件。
27.图5是装载系统12的部分的实施例的横截面侧视图,其图示了在缩回位置108中的护栏单元114。在一些实施例中,下栏杆区段120、或护栏单元114的另一合适部分可以包括耦联到其的推板124。推板124被配置为当乘坐运载器82进入装载路径36时与特定乘坐运载器14(诸如乘坐运载器82)的接合特征126接合。接合特征126可以包括一个或多个轴或梁、长形板、和/或从乘坐运载器82向外延伸的其他合适的突出部或多个突出部。
28.当乘坐运载器82从进入通道50靠近转台18时,接合特征126可以接合(例如,物理接触)推板124以在径向向内方向127上推动推板124。接合特征126可以耦联到乘坐运载器82的底盘128、耦联到机器人操纵器80的部分(例如,耦联到支撑结构84)、耦联到运输工具70、或其组合。在任何情况下,推板124和接合特征126之间的接合可以引起铰接点118的铰连,以准许栏杆区段116中的每个在转台18下方顺序地下撤回。因此,当乘坐运载器82靠近转台18时(例如,当乘坐运载器进入装载路径36时),护栏单元114可以从延伸位置106逐渐转换到缩回位置108。
29.例如,在一些实施例中,铰接点118中的每个可以包括偏置铰链(例如,具有集成的弹簧的铰链组件),其被偏置以搁置在基本上线性的配置中。也就是说,当护栏单元114在延伸位置106中时,偏置铰链可以被偏置(例如,经由集成的弹簧),以使栏杆区段116中的每个总体上平行于彼此对准。因此,偏置铰链可以被配置为当护栏单元114在延伸位置106中时将栏杆区段116维持在基本上竖直的取向(例如,相对于转台18的表面110)中。当护栏单元114从延伸位置106被推动到缩回位置108(例如,经由接合特征126)时,偏置铰链可以铰连,以准许栏杆区段116顺序地撤回在转台18下方。例如,当在径向向内方向127上沿着轨道组件123平移时,铰接点118可以沿着转台18的外边缘34顺序地滑动,从而引起偏置铰链的铰连,并且因此引起单独的栏杆区段116的铰连。通过准许栏杆区段116的这样的铰连,偏置铰链可以确保护栏单元114在从延伸位置106转换到缩回位置108时不干涉(例如,接触)乘坐运载器82的部件,或反之亦然。在一些实施例中,合适的支撑结构129(例如,引导环)可以在转台18附近在护栏单元114周围定位,并且确保当单独的栏杆区段116顺序地撤回在转台18
下方时护栏单元114的远端部部分130不沿着在径向向外方向132上摆动的弧行进。以这种方式,接合特征126、轨道组件123、铰接点118和支撑结构129之间的协作可以准许护栏单元114在乘坐运载器82靠近转台18时逐渐撤回在转台18下方。应当领会,在某些实施例中,护栏组件100可以被配置为当转换到缩回位置108时缩回到形成在转台18内的槽或腔体中,而不是撤回在转台18下方(例如,而不是撤回在转台18的下侧下方)。在任何情况下,在缩回位置108中,护栏单元114可以在视线之外或者以其他方式对定位在装载区42中的客人是不能够接近的,并且可以准许乘坐运载器82占据沿着装载路径36的客人能够接近的位置。
30.在某些实施例中,栏杆区段116可以被配置为在铰接点118处选择性地彼此接合(例如,耦联)和从彼此脱离(例如,解耦),以准许在护栏单元114在延伸位置106和缩回位置108之间的转换期间的栏杆区段116的铰连。例如,在一些实施例中,栏杆区段116中的某些栏杆区段可以包括具有凸耦联器的第一端部部分和具有凹耦联器的第二端部部分。特定栏杆区段116的凸耦联器可以被配置为选择性地(例如,在铰接点118中的一个处)与邻近栏杆区段116的相应凹耦联器接合。弹性导线、弹簧机构、和/或另一合适的装置或机构可被配置为延伸穿过栏杆区段116中的每个的内部,并且可耦联到例如最上部栏杆区段136(例如,栏杆区段116的最上部)的远端部部分130和最下部栏杆区段120的下端部部分138。因此,弹性导线可以在栏杆区段116中的每个之间施加并维持压缩力,当护栏单元114在延伸位置106中时,该压缩力可以适于维持栏杆区段116的凸耦联器和凹耦联器之间的接合。
31.实际上,当护栏单元114在延伸位置106中时,栏杆区段116的相应凸耦联器和凹耦联器之间的接合可以准许栏杆区段116从转台18基本上竖直地延伸。当护栏单元114在延伸位置106中时,延伸穿过栏杆区段116的弹性导线可以确保相应的凸耦联器和凹耦联器不从彼此脱离(例如,由于由客人进行的篡改)。当护栏单元114撤回在转台18下方时,栏杆区段116可以在铰接点118处顺序地从彼此脱离(例如,由于与转台18的外边缘34接触),以准许护栏单元114撤回在转台18下方。特别地,接合特征126可以向护栏单元114施加力,该力足以使栏杆区段116内的弹性导线伸长,以准许栏杆区段116的相应的凸耦联器和凹耦联器在护栏单元114的撤回期间顺序地与彼此脱离。因此,栏杆区段116的这样的顺序解耦准许相应栏杆区段116之间的铰连。弹性导线可以被配置为当护栏单元114从缩回位置108转换到延伸位置106时顺序地重新接合栏杆区段116的相应的凸耦联器和凹耦联器。
32.在一些实施例中,弹簧140可以定位在支撑件142(例如,转台18的部件)和推板124之间,以将支撑件142从推板124偏置(例如,将支撑件142从推板124推动开)。因此,当乘坐运载器82离开装载路径36(例如,经由出口通道62)时,弹簧140可以沿着轨道组件123在径向向外方向132上推动护栏单元114。也就是说,当接合特征126从转台18向外行进时,弹簧140可以朝向延伸位置106推动护栏单元114。应当理解,可以选择弹簧140的弹簧力,使得当护栏单元114在延伸位置106中时,客人不能够向下朝向缩回位置108推动护栏单元114。此外,在其他实施例中,除了弹簧140之外或代替弹簧140,可以使用液压推杆或另一合适的致动器(例如,气动致动器、线性致动器),以将护栏单元114从缩回位置108转换到延伸位置106。
33.在一些实施例中,除了弹簧140之外,阻尼器144可以耦联到支撑件142。阻尼器144可以被配置为限制护栏单元114的延伸速率(例如,护栏单元114从缩回位置108平移到延伸位置106的速率)。特别地,当接合特征126在径向向外方向132上平移时(例如,当乘坐运载
器82经由出口通道62离开装载路径36时),阻尼器144可以控制护栏单元114从缩回位置108平移到延伸位置106的速率,使得推板124可以以比接合特征126在径向向外方向132上的平移速率慢的速率在径向向外方向132上平移。在一些实施例中,传感器(例如,接近传感器)可以定位在推板124附近,并且被配置为监测推板124的位置,并且因此监测护栏单元114的位置。在一些实施例中,如果例如乘坐运载器82离开装载路径36并且护栏单元114未被检测为从缩回位置108转换到延伸位置106,则这样的传感器可以促进生成警报。
34.应当理解,在一些实施例中,乘坐运载器82可以被配置为当乘坐运载器82进入装载路径36时与两个或更多个护栏单元102的相应推板124接合。在这样的实施例中,乘坐运载器82可以根据上面讨论的技术引起若干个护栏单元102以顺序或交错的方式的撤回。例如,为了更好地图示,图6是装载系统12的部分的顶部示意图,其图示了当乘坐运载器82进入装载路径36时,接合特征126与第一护栏单元152的第一推板150、第二护栏单元156的第二推板154、和第三护栏单元160的第三推板158的顺序接合。因此,第一护栏单元152、第二护栏单元156和第三护栏单元160可以顺序地撤回在转台18下方,以从相应的延伸位置106转换到相应的缩回位置108。如图7中所图示的实施例中所示,第一护栏单元152、第二护栏单元156和第三护栏单元160可以与乘坐运载器82一起围绕轴线20旋转(例如,当在缩回位置108时),以准许客人沿着装载区42登上乘坐运载器82或从乘坐运载器82卸载。应当理解,当乘坐运载器82经由出口通道62离开装载路径36时(例如,当接合特征126从第一推板150、第二推板154和第三推板158顺序地脱离时),第一护栏单元152、第二护栏单元156和第三护栏单元160可以从转台18下方顺序地延伸,以转换到它们相应的延伸位置106。
35.在一些实施例中,护栏单元102可以尺寸设计成使得当乘坐运载器82沿着装载路径36(例如,相对于转台18)在对准位置166中时,沿着乘坐运载器82的长度168定位的特定护栏单元102(例如,护栏单元152、156、160)转换到相应的缩回位置108。因此,乘坐运载器82的基本上所有长度168可以沿着装载区42对客人是能够接近的,而定位在乘坐运载器82前方和后方的间隙30的部分在延伸位置106中被相应的护栏单元102阻挡。应当领会,护栏单元102的定尺寸成使得即使当乘坐运载器82相对于转台18在未对准位置170中(如图8中所示)时,乘坐运载器82与在延伸位置106中的邻近护栏单元102之间的空间172(例如,如图8中所示)可以不足以准许客人对间隙30的接近。
36.虽然在多个护栏单元102的上下文中讨论了某些公开的实施例,但是所公开的间隙阻挡系统72可以附加地或替代地包括如本文中总体上提供的致动板件系统。图9是装载系统12的部分的实施例的示意性顶视图,其图示了包括致动板件系统200的间隙阻挡系统72的另一实施例。如下面所讨论的,致动板件系统200包括多个板件202,多个板件202被配置为选择性地阻挡未被乘坐运载器14的部件占据或以其他方式被乘坐运载器14覆盖(例如,被乘坐运载器14的相应底盘覆盖)的间隙30的部分。因此,致动板件系统200可以确保间隙30在装载系统12的操作期间经由乘坐运载器82或板件202对客人保持被覆盖。
37.在一些实施例中,板件202可以耦联到转台18并且围绕转台18的周缘间隔。因此,板件202可以与转台18一起围绕轴线20旋转。板件202中的每个可以被配置为在延伸位置206(例如,第一位置)和缩回位置208(例如,第二位置)之间转换,在延伸位置206中板件202跨间隙30延伸以覆盖或基本上覆盖间隙30的相应部分,在缩回位置208中板件202不覆盖(例如,暴露)间隙30的相应部分。在一些实施例中,板件202可以被配置为相对于转台18在
延伸位置206和缩回位置208之间(例如,相对于轴线20)径向平移。例如,为了转换到延伸位置206,板件202可以在径向向外方向132上朝向外平台28平移。为了转换到缩回位置208,板件202可以在径向向内方向127上平移以撤回在转台18下方和/或进入转台18内的腔体。如下面所讨论的,板件202中的每个可以与合适的致动器相关联,该致动器被配置为基于装载系统12的一个或多个参数将板件202在延伸位置206和缩回位置208之间转换。
38.在一些实施例中,板件202的径向最外边缘可以被配置为在外平台28下方延伸,或者当板件202在延伸位置206中时延伸到形成在外平台28内的凹槽中。因此,当在延伸位置206中时,板件202可以完全跨越间隙30的径向尺寸。在一些实施例中,板件202中的每个可以包括特定的几何形状,当板件202在延伸位置206中时,该特定的几何形状便于覆盖间隙30和/或接合在外平台28内。例如,板件202可以包括总体上梯形形状或总体上拱形形状,其准许板件202在延伸位置206中与彼此邻接和/或重叠以基本上覆盖间隙30(例如,以减小或基本上消除相邻板件202之间的空间)。
39.在一些实施例中,致动板件系统200可以包括多个刷子210,多个刷子210耦联到沿着外平台28的内边缘32设置的壁或其他结构并且朝向转台18的轴线20径向延伸。刷子210可以被配置为当板件202在延伸位置206中时与板件202接合(例如,重叠、物理接触)。以这种方式,刷子210可以确保可以保留在外平台28的内边缘32和延伸板件202的径向最外边缘之间的任何空间基本上被覆盖。此外,当板件202移动时,刷子210能够偏转,从而准许板件202相对于刷子210的移动。在实施例中,刷子210可以跨越间隙30的部分,以使得板件202的总体长度(例如,相对于轴线20的径向尺寸)能够减小。也就是说,在延伸位置206中,板件202可以被配置为延伸到刷子210,而不是延伸到外平台28的内边缘32。在一些实施例中,刷子210的这样的被配置可以因此减少在延伸位置206和缩回位置208之间转换板件202可能涉及的致动时间。在某些实施例中,除了耦联到外平台28的内边缘32的刷子210之外或代替耦联到外平台28的内边缘32的刷子210,附加的刷子可以耦联到板件202的径向最外边缘。
40.图10是装载系统12的部分的实施例的顶视图,其图示了致动板件系统200的板件202中的一些,在下文中称为板件阵列218。为了更好地图示板件阵列218,转台18已经从装载系统12的图示实施例移除。在一些实施例中,板件202中的每个包括相应的框架220,该相应的框架220被配置为耦联板件202转台18的合适的支撑结构222(例如,转台18的表面110下方的结构)。例如,在图示实施例中,每个框架220包括第一框架栏杆224和第二框架栏杆226,第一框架栏杆224和第二框架栏杆226耦联到支撑结构222并且从轴线20总体上径向地延伸。每个板件202包括一对引导件228,引导件228被配置为与对应的第一框架栏杆224和第二框架栏杆226接合,以准许板件202相对于转台18的平移移动。特别地,与板件202中的每个相关联的相应致动器230可以被配置为将板件202沿着第一框架栏杆224和第二框架栏杆226在延伸位置206和缩回位置208之间选择性地平移。作为示例,致动器230可以包括电动致动器(例如,线性致动器)、液压致动器、气动致动器、机械致动器(例如,螺纹轴)、或准许板件202的单独可调节性的任何其他合适的致动器。然而,在其他实施例中,可以使用单个致动器来调节板件202中的两个或更多个的位置。
41.尽管板件202已经被描述为相对于转台18径向平移,但是应当领会,在其他实施例中,板件202可以沿着任何合适的路径或运动轮廓移动以在延伸位置206和缩回位置208之间转换。实际上,应当理解,致动器230可以以任何合适的方式将板件202在延伸位置206和
缩回位置208之间转换。也就是说,代替在延伸位置206和缩回位置208之间径向地(例如,相对于轴线20)平移板件202,致动器230可以被配置为在延伸位置206和合适的缩回位置208(例如,在转台18的表面的竖直下方的位置)之间枢转、倾斜、旋转、或以其他方式移动板件202。例如,在一些实施例中,致动器230可以被配置为将板件202围绕相应的横向轴线(例如,沿着转台18的平面延伸的轴线)在延伸位置206和对应的缩回位置208之间枢转。此外,如下面所讨论的,致动器230可以被配置为将板件202中的一些或所有板件202围绕轴线20周向地平移,以在相应的延伸位置206和缩回位置208之间转换。应当领会,在一些实施例中,板件202中的一个或多个及其对应的致动器230可以耦联到外平台28而不是转台18。
42.以下讨论参考图9继续。如图示的实施例中所示,装载系统12可以包括控制器234,如下面所讨论的,控制器234可以被配置为基于乘坐系统10的一个或多个参数选择性地将板件202中的某些板件在延伸位置206与缩回位置208之间转换。实际上,控制器234可以经由电线和/或其他合适的有线或无线通信线操作性地耦联到致动器230,并且被配置为选择性地致动致动器230中的每个。控制器234可以包括通信电路236、处理器240和存储器243。处理器240可以包括微处理器,该微处理器可以执行用于控制装载系统12的部件的软件,所述部件诸如致动器230、转台18的驱动马达、运输工具70、和/或装载系统12和/或乘坐系统10的任何其他合适的部件。应当领会,在一些实施例中,控制器234可以与乘坐系统10的中央乘坐控制器的部分集成或包括中央乘坐控制器的部分。
43.处理器240可以包括多个微处理器、一个或多个“通用”微处理器、一个或多个专用微处理器、和/或一个或多个专用集成电路(asic)、或其一些组合。例如,处理器240可以包括一个或多个精简指令集(risc)处理器。存储器243可以包括易失性存储器(诸如随机存取存储器(ram))、和/或非易失性存储器(诸如只读存储器(rom))。存储器243可以存储信息,诸如控制软件、查找表、配置数据等。例如,存储器243可以存储处理器可执行指令,包括供处理器240执行的固件或软件,诸如致动器230、转台18的驱动马达、运输工具70、和/或装载系统12的和/或乘坐系统10的任何其他合适的部件。在一些实施例中,存储器243是有形的、非暂时性、机器可读介质,其可以存储供处理器240执行的机器可读指令。存储器243可以包括rom、闪存存储器、硬盘驱动器、或任何其他合适的光学、磁性、或固态存储介质、或其组合。
44.在一些实施例中,控制器234可被配置为基于从乘坐系统10的各种传感器获取的传感器数据来确定乘坐运载器14沿着景观路径16和/或装载路径36的位置。作为示例,这样的传感器可以包括耦联到乘坐运载器14中的每个并且与控制器234通信的相应跟踪传感器242(例如,全球定位系统[gps]传感器)。然而,应当领会,除了跟踪传感器242之外或代替跟踪传感器242,可以使用各种其他传感器,以监测乘坐运载器14沿着景观路径16或装载路径36的相应位置。控制器234可以被配置为沿着不邻近乘坐运载器14中的任何一个定位的转台18的部分将板件202维持在延伸位置206中。因此,在装载系统12的操作期间,沿着转台18的这样的部分的间隙30的区段可以保持被覆盖(例如,对客人是不能够接近的)。
[0045]
在确定乘坐运载器14中的一个(诸如乘坐运载器82)靠近装载路径36(例如,从进入通道50靠近间隙30)时,控制器234可以指示板件202中的一个或多个转换到它们相应的缩回位置208,从而准许机器人操纵器80的支撑结构84在乘坐运载器82的装载/卸载过程期间进入到间隙30中并沿着间隙30行进。也就是说,支撑结构84可以定位在空间244(例如,间
隙30的部分)中,该空间244形成在处于相应延伸位置206中的前相邻板件246和后相邻板件248之间,使得当乘坐运载器82和板件202共同地围绕轴线20旋转时,支撑结构84不干涉这些板件202。作为示例,在一些实施例中,控制器234可以指示(例如,经由发送到对应的致动器230的控制信号)邻近乘坐运载器82的三个板件202在乘坐运载器82进入到装载路径36中时转换到缩回位置208。特别地,在某些实施例中,当乘坐运载器82进入装载路径36时,控制器234可以启动三个板件202中的第一板件250、第二板件252和第三板件254的顺序或交错缩回。乘坐运载器82的底盘128可以包括外部尺寸,该外部尺寸足以覆盖由在缩回位置208中的三个板件202暴露的间隙30(例如,空间244)的部分。也就是说,在一些实施例中,当乘坐运载器82在装载路径36中时,底盘128可以被配置为与间隙30的径向尺寸重叠,从而准许乘坐运载器82阻挡客人对空间244的接近。因此,当乘坐运载器82、板件202、和转台18围绕轴线20旋转时,间隙30可以保持对客人是基本上不能够接近的。
[0046]
在某些实施例中,通过缩回定位在乘坐运载器82下方的多个板件(例如,第一板件250、第二板件252和第三板件254),控制器234可以创建缓冲区,该缓冲区定位在机器人操纵器80的支撑结构84与定位在支撑结构84之前和后方的相应板件202(例如,前相邻板件246和后相邻板件248)之间。缓冲区可以确保转台18的旋转速度与运输工具70沿着间隙30的行进速度之间的微小变化不引起支撑结构84与前相邻板件246和后相邻板件248之间的相互作用(例如,物理接触)。此外,如下面所讨论的,缓冲区可确保乘坐运载器82相对于转台18的相对移动(其可在乘坐系统10的操作意外地暂停时发生)不会导致乘坐运载器82的部件(例如,支撑结构84)与前相邻板件246或后相邻板件248之间的接合。
[0047]
在实施例中,除了来自与每个板件202相关联的相应传感器256的反馈之外或代替来自与每个板件202相关联的相应传感器256的反馈,控制器234可以基于来自耦联到板件202中的每个的相应跟踪传感器242的反馈来控制板件202的调节(例如,将板件202在延伸位置206与缩回位置208之间转换)。例如,在一些实施例中,传感器256可以包括感应传感器、光电传感器、超声传感器、各种其他接近传感器、射频(rf)模块、或其组合。传感器256可以被配置为在乘坐运载器82进入或靠近装载路径36时检测乘坐运载器82。例如,传感器256可以被配置为在乘坐运载器82进入或靠近装载路径36时检测机器人操纵器80的支撑结构84。也就是说,传感器256可以被配置为确定支撑结构84和/或乘坐运载器82的另一合适的部件是否在对应板件202的阈限距离内。在确定乘坐运载器82在特定板件202的阈限距离内时,控制器234可以将特定板件202以及在一些实施例中的一个或多个相邻板件202从延伸位置206转换到缩回位置208。以这种方式,控制器234准许支撑结构84在进入装载路径36时延伸穿过间隙30的未覆盖区段(例如,空间244)。因此,运输工具70与机器人操纵器80协作可以沿着装载路径36推进乘坐运载器82,而定位在乘坐运载器82的底盘128的前方和后方的间隙30的区段保持被覆盖并且对客人是不能够接近的。
[0048]
在某些实施例中,控制器234可以连续地或周期性地(例如,在经过预定时间间隔之后)监测乘坐运载器82沿着装载路径36的位置(例如,基于来自跟踪传感器242和/或传感器256的反馈)。在确定乘坐运载器82正在离开装载路径36时,诸如当乘坐运载器82靠近或进入出口通道62时,控制器234可以指示三个板件202(例如,第一板件250、第二板件252和第三板件254)返回到它们相应的延伸位置206。作为示例,在一些实施例中,控制器234可以经由发送到对应的致动器230的指令以交错或顺序的方式将第一板件250、第二板件252和
第三板件254延伸到它们相应的延伸位置206。
[0049]
在一些实施例中,来自传感器256的反馈准许控制器234确定表示板件202中的一个或多个的位置的状态信息。特别地,状态信息可以表示各个板件202是否在相应的延伸位置206或缩回位置208中。在一些实施例中,除了传感器256之外或代替传感器256,致动器230可以被配置为向控制器234提供表示板件202的位置的状态信息。因此,控制器234可以被配置为在装载系统12的操作期间使用状态信息来监测板件202中的每个的位置。在一些实施例中,控制器234可以被配置为在确定板件202中的任一个被定位在异常或意外位置中时向乘坐系统10的乘坐技术人员或操作者提供警报。作为示例,在确定先前相邻板件202的乘坐运载器14(例如,乘坐运载器82)已经离开装载路径36之后特定板件202(例如,第一板件250)保持在缩回位置中时,控制器234可以生成警报(例如,声音警报、显示在显示设备上的由操作员能够观看的警报)。
[0050]
如上所述,在一些实施例中,板件202中的某些可以被配置为沿着转台18周向地而不是径向地平移,以在相应的延伸位置206和缩回位置208之间转换。作为示例,第一板件250可以被配置为在顺时针方向22上沿着转台18周向平移,以从其相应的延伸位置206转换到缩回位置,其中第一板件250定位在前相邻板件246的上方或下方。第三板件254可以被配置为在逆时针方向258上沿着转台18周向平移,以从其相应的延伸位置206转换到缩回位置,其中第三板件254定位在后相邻板件248的上方或下方。
[0051]
图11是装载系统12的部分的实施例的示意性顶视图。在一些实施例中,控制器234可以接收指令(例如,经由来自操作者的输入)以启动乘坐系统10的正常关闭,这在本文中将被称为第一制动场景。当执行第一制动场景时,控制器234可以逐渐减慢和停止乘坐运载器14(例如,经由发送到运输工具70的指令)和转台18(例如,经由发送到转台18的驱动马达的指令)的移动,以暂停乘坐系统10的操作。特别地,控制器234可以监测在装载路径36中相对于转台18的位置的乘坐运载器14的位置(例如,经由传感器242和/或256)(例如,经由耦联到转台18的传感器和/或来自转台18的驱动马达的反馈来监测),以确保乘坐运载器14在第一制动场景的执行期间相对于转台18在特定位置处保持对准。也就是说,控制器234可以基于所获取的传感器反馈来确保转台18围绕轴线20的旋转速度以一速率减小,所述速率基本上类似于在第一制动场景的执行期间乘坐运载器14围绕轴线20(例如,沿着装载路径36)的旋转速度减小的速率。
[0052]
在一些实施例中,乘坐系统10可在操作中经历中断或异常,其可促使控制器234启动第二制动场景以更快速地停止乘坐运载器14和转台18的移动,以暂时暂停乘坐系统10的操作。在这样的实施例中,乘坐运载器14可以能够在小于可能涉及减速和停止旋转转台18的移动的时间段的时间段中减速和停止移动(例如,由于各个乘坐运载器14的惯性和转台18的惯性的差异)。作为结果,在乘坐运载器14已经停止之后,转台18和板件202可以继续相对于沿着装载路径36定位的乘坐运载器14移动特定距离。也就是说,在乘坐运载器14已经停止沿着装载路径36移动之后,转台18可以继续在顺时针方向22上围绕轴线20旋转。转台18与装载路径36中的特定乘坐运载器14(例如,乘坐运载器82)之间的这种相对移动可以暴露间隙30的部分,在本文中称为“暴露部分”,其通常在乘坐系统10的正常操作期间由乘坐运载器82的底盘128覆盖。作为示例,间隙30的“暴露部分”可以表示在装载系统12的正常操作期间通常由第一板件250暴露(例如,不覆盖)但由乘坐运载器82的底盘128覆盖的间隙30
的部分。
[0053]
在一些实施例中,控制器234可以被配置为基于乘坐运载器82对于转台18的相对位置(例如,如经由来自传感器242和/或256的反馈所确定的)来确定暴露部分的长度。如果暴露部分的长度超过阈限值,则控制器234可以指示邻近暴露部分的板件中的一个或多个(例如,第一板件250)转换到延伸位置206以覆盖间隙30的暴露部分。因此,控制器234可以确保在乘坐系统10的异常去激活期间,基本上所有间隙30保持被覆盖并且对客人是不能够接近的。应当理解,在一些实施例中,控制器234可以指示例如第一板件250在径向向外方向132上从相应的缩回位置208平移到相应的延伸位置206,以覆盖间隙30的暴露部分。然而,在其他实施例中,第一板件250可以相对于转台18(例如,在逆时针方向258上)从前相邻板件246下方或上方的相应缩回位置周向平移到延伸位置206,以在第二制动场景的执行期间和/或之后覆盖间隙30的暴露部分。
[0054]
在一些实施例中,当经历第二制动场景时,控制器234可以被配置为监测相对于乘坐运载器82的行进方向44定位在支撑结构84后方的延伸板件(例如,后相邻板件248)的位置。在一些实施例中,在第二制动场景的执行期间,在确定后相邻板件248的边缘与支撑结构84之间的距离减小到阈限值以下时,控制器234可以发送指令以将后相邻板件248转换到其对应的缩回位置208。因此,当转台18在第二制动场景期间相对于乘坐运载器82旋转相对大的角度增量时,控制器234可以确保后相邻板件248不与支撑结构84接合。在某些实施例中,板件202可以被配置为如果板件202意外地与支撑结构84和/或乘坐运载器82的另一部分接合则切断(例如,与转台18解耦)。如下面所讨论的,在某些实施例中,控制器234可以被配置为如果例如支撑结构84与前相邻板件246之间的距离在第二制动场景的执行期间下降到阈限值以下,则发送指令以将前相邻板件246从延伸位置206转换到缩回位置208。
[0055]
应当领会,在一些实施例中,转台18可以能够在小于可能涉及减速和停止乘坐运载器14的移动的时间段的时间段中减速和停止移动(例如,由于包括在转台18的驱动马达中的制动系统)。作为结果,乘坐运载器14可以在转台18已经停止之后继续沿着装载路径36相对于转台18和板件202移动特定距离。也就是说,在转台18已经停止围绕轴线20(例如,在顺时针方向22上)移动之后,乘坐运载器14可以继续沿着装载路径36围绕轴线20在顺时针方向22上行进。转台18与装载路径36中的特定乘坐运载器14(例如,乘坐运载器82)之间的这种相对移动可以暴露乘坐运载器82后方(例如,相对于乘坐运载器82的移动方向)的间隙30的部分,该部分在乘坐系统10的正常操作期间通常由乘坐运载器82的底盘128覆盖。因此,根据上面讨论的技术,控制器234可以邻近间隙30的这样的暴露部分的指示板件202中的一个(例如,第三板件254)转换到延伸位置206,以覆盖间隙30的该暴露部分。因此,控制器234可以确保在乘坐系统10的异常去激活期间,基本上所有间隙30保持被覆盖并且对客人是不能够接近的。
[0056]
此外,在一些实施例中,控制器234可以被配置为如果支撑结构84或乘坐运载器82的另一部件与前相邻板件246之间的距离(例如,如由传感器242和/或传感器246监测的)在制动场景(诸如第二制动场景)的执行期间下降到阈限值以下,则将前相邻板件246从延伸位置206转换到缩回位置208。为此,控制器234可以确保乘坐运载器82在这样的制动过程的执行期间不接合(例如,接触)前相邻板件246。
[0057]
如以上所阐述的,本公开的实施例可以提供用于阻挡对游乐园景观的部分(在该
处客人可以有可能意外丢失某些个人物品)的接近的一个或多个技术效果。特别地,本文中公开的间隙阻挡系统72的实施例便于将乘客到非静止乘坐运载器14中的装载和卸载,而客人对间隙30的接近基本上被阻挡。应当理解,说明书中的技术效果和技术问题是示例而不是限制性的。实际上,应当注意,说明书中描述的实施例可以具有其他技术效果,并且能够解决其他技术问题,并且可以在游乐园环境之外使用。
[0058]
虽然本文中已经图示和描述了本实施例的仅某些特征,但是本领域技术人员将想到许多修改和改变。因此,应当理解,所附权利要求旨在覆盖落入本公开的真实精神内的所有这样的修改和改变。此外,应当理解,所公开的实施例的某些元素可以与彼此组合或交换。
[0059]
本文中提出和要求保护的技术被引用并应用于具有实际性质的实质性对象和具体示例,其明显改进了本技术领域,并且因此不是抽象的、无形的或纯理论的。此外,如果附到本说明书末尾的任何权利要求包含被指定为“用于[执行]
……
[功能]的装置”或“用于[执行]
……
[功能]的步骤”的一个或多个元素,则其旨在根据35 u.s.c.112(f)来解释这样的元素。然而,对于包含以任何其他方式指定的元素的任何权利要求,其旨在不根据35 u.s.c.112(f)来解释这样的元素。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1