一种生物仿生玩具狗的制作方法
1.本实用新型涉及生物仿生技术领域,具体为一种生物仿生玩具狗。
背景技术:
2.仿生学一词是1960年由美国斯蒂尔根据拉丁文“bios(生命方式的意思)”和字尾“nlc(
‘
.具有
……
的性质’的意思)”构成的。这个词语大约从1961年才开始使用。某些生物具有的功能迄今比任何人工制造的机械都优越得多,仿生学就是要在工程上实现并有效地应用生物功能的一门学科。例如关于信息接受(感觉功能)、信息传递(神经功能)、自动控制系统等,这种生物体的结构与功能在机械设计方面给了很大启发。而在玩具方面,仿生的知识也能运用进去,而一般的玩具较为机械化,也没有动力。
技术实现要素:
3.本实用新型的目的在于提供了一种生物仿生玩具狗,达到增加趣味性的目的。
4.为实现上述目的,本实用新型提供如下技术方案:一种生物仿生玩具狗,包括主体,所述主体内壁固定连接有挡板,所述挡板上固定连接有转动电机,所述转动电机的输出端设置有传动结构a,所述主体内壁固定连接有直线电机,所述直线电机的输出端设置有传动结构b,所述主体外壁固定连接有支撑杆a,所述支撑杆a下端固定连接有支撑杆b,所述支撑杆b下端设置有滚轮,所述主体外壁固定连接有支撑杆c,所述支撑杆c下端通过转轴转动连接有支撑杆d。
5.优选的,所述传动结构a包括有延伸杆a、伞齿轮a、伞齿轮b、延伸杆b、套杆、伞齿轮c、伞齿轮d、延伸杆c,所述延伸杆a的右端通过联轴器与转动电机的输出端固定连接,所述伞齿轮a固定套设在延伸杆a上,所述伞齿轮b固定连接在延伸杆b的上端,所述伞齿轮a与伞齿轮b啮合连接,所述套杆的左端与主体内壁固定连接,所述套杆的右端通过第一轴承套接在延伸杆b上,所述伞齿轮c固定连接在延伸杆b的下端,所述伞齿轮d固定套设在延伸杆c上,所述伞齿轮c与伞齿轮d啮合连接,所述延伸杆c的两端与滚轮固定连接,所述延伸杆c的两端通过第二轴承与支撑杆b转动连接。
6.优选的,所述传动结构b包括有固定杆、固定板、传动杆a、齿轮、传动杆b、传动杆c、传动杆d,所述固定杆的上端与直线电机的输出端固定连接,所述固定杆的下端与固定板固定连接,所述固定板的一端与传动杆a固定连接,所述传动杆a的一端与传动杆b的一端铰接,所述传动杆b远离传动杆a的一端与传动杆c的一端铰接,所述传动杆c远离传动杆b的一端与传动杆d铰接,所述传动杆d远离传动杆c的一端与传动杆a和齿轮铰接,所述传动杆c与支撑杆b固定连接。
7.优选的,所述延伸杆a的左端固定连接有扇叶。
8.优选的,所述固定板的另一端设置有相同结构,且两个所述齿轮啮合连接。
9.优选的,所述套杆的右端与第一轴承的外壁固定连接,所述第一轴承的内壁与延伸杆b固定连接。
10.优选的,所述第二轴承的外壁与支撑杆b固定连接,所述第二轴承内壁与延伸杆c固定连接,所述延伸杆c的两端与滚轮上开设的圆孔内壁固定连接。
11.本实用新型提供了一种生物仿生玩具狗。具备以下有益效果:
12.(1)、本实用新型通过传动结构a使得机械狗可以具有动力,同时使得机械狗的扇叶可以转动,增加了机械狗的趣味性。
13.(2)、本实用新型通过传动结构b可以使得机械狗的腿跑动起来,使其更加生动。
附图说明
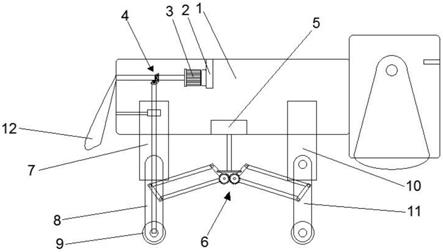
14.图1为本实用新型剖面主视图;
15.图2为本实用新型传动结构a剖面主视图;
16.图3为本实用新型传动结构a侧视图;
17.图4为本实用新型传动结构b剖面主视图;
18.图5为本实用新型传动结构b侧视图。
19.图中:1、主体;2、挡板;3、转动电机;4、传动结构a;401、延伸杆a;402、伞齿轮a;403、伞齿轮b;404、延伸杆b;405、套杆;406、伞齿轮c;407、伞齿轮d;408、延伸杆c;5、直线电机;6、传动结构b;601、固定杆;602、固定板;603、传动杆a;604、齿轮;605、传动杆b;606、传动杆c;607、传动杆d;7、支撑杆a;8、支撑杆b;9、滚轮;10、支撑杆c;11、支撑杆d;12、扇叶。
具体实施方式
20.如图1-5所示,本实用新型提供一种技术方案:一种生物仿生玩具狗,包括主体1,主体1内壁固定连接有挡板2,挡板2上固定连接有转动电机3,转动电机3的输出端设置有传动结构a4,传动结构a4包括有延伸杆a401、伞齿轮a402、伞齿轮b403、延伸杆b404、套杆405、伞齿轮c406、伞齿轮d407、延伸杆c408,延伸杆a401的右端通过联轴器与转动电机3的输出端固定连接,延伸杆a401的左端固定连接有扇叶12,伞齿轮a402固定套设在延伸杆a401上,伞齿轮b403固定连接在延伸杆b404的上端,伞齿轮a402与伞齿轮b403啮合连接,套杆405的左端与主体1内壁固定连接,套杆405的右端通过第一轴承套接在延伸杆b404上,套杆405的右端与第一轴承的外壁固定连接,第一轴承的内壁与延伸杆b404固定连接,伞齿轮c406固定连接在延伸杆b404的下端,伞齿轮d407固定套设在延伸杆c408上,伞齿轮c406与伞齿轮d407啮合连接,延伸杆c408的两端与滚轮9固定连接,延伸杆c408的两端通过第二轴承与支撑杆b8转动连接,第二轴承的外壁与支撑杆b8固定连接,第二轴承内壁与延伸杆c408固定连接,延伸杆c408的两端与滚轮9上开设的圆孔内壁固定连接,通过传动结构4a使得机械狗可以具有动力,同时使得机械狗的扇叶12可以转动,增加了机械狗的趣味性,主体1内壁固定连接有直线电机5,直线电机5的输出端设置有传动结构b6,传动结构b6包括有固定杆601、固定板602、传动杆a603、齿轮604、传动杆b605、传动杆c606、传动杆d607,固定杆601的上端与直线电机5的输出端固定连接,固定杆601的下端与固定板602固定连接,固定板602的一端与传动杆a603固定连接,传动杆a603的一端与传动杆b605的一端铰接,传动杆b605远离传动杆a603的一端与传动杆c606的一端铰接,传动杆c606远离传动杆b605的一端与传动杆d607铰接,传动杆d607远离传动杆c606的一端与传动杆a603和齿轮604铰接,传动杆c606与支撑杆b8固定连接,固定板602的另一端设置有相同结构,且两个齿轮604啮合连接,
通过传动结构b6可以使得机械狗的腿跑动起来,使其更加生动,主体1外壁固定连接有支撑杆a7,支撑杆a7下端固定连接有支撑杆b8,支撑杆b8下端设置有滚轮9,主体1外壁固定连接有支撑杆c10,支撑杆c10下端通过转轴转动连接有支撑杆d11。
21.在使用时,当转动电机3转动时,延伸杆a401转动,带动扇叶12转动,模仿小狗摇尾巴,与此同时,通过伞齿轮a402与伞齿轮b403啮合,伞齿轮c406与伞齿轮d407啮合,使得延伸杆c408转动带动滚轮9转动,致使机械狗向前运动,此时直线电机5运动使得固定杆601带动固定板602进行上下往复运动,两个齿轮604啮合使得支撑杆d11来回摆动模仿小狗的腿部跑动。
技术特征:
1.一种生物仿生玩具狗,包括主体(1),其特征在于:所述主体(1)内壁固定连接有挡板(2),所述挡板(2)上固定连接有转动电机(3),所述转动电机(3)的输出端设置有传动结构a(4),所述主体(1)内壁固定连接有直线电机(5),所述直线电机(5)的输出端设置有传动结构b(6),所述主体(1)外壁固定连接有支撑杆a(7),所述支撑杆a(7)下端固定连接有支撑杆b(8),所述支撑杆b(8)下端设置有滚轮(9),所述主体(1)外壁固定连接有支撑杆c(10),所述支撑杆c(10)下端通过转轴转动连接有支撑杆d(11)。2.根据权利要求1所述的一种生物仿生玩具狗,其特征在于:所述传动结构a(4)包括有延伸杆a(401)、伞齿轮a(402)、伞齿轮b(403)、延伸杆b(404)、套杆(405)、伞齿轮c(406)、伞齿轮d(407)、延伸杆c(408),所述延伸杆a(401)的右端通过联轴器与转动电机(3)的输出端固定连接,所述伞齿轮a(402)固定套设在延伸杆a(401)上,所述伞齿轮b(403)固定连接在延伸杆b(404)的上端,所述伞齿轮a(402)与伞齿轮b(403)啮合连接,所述套杆(405)的左端与主体(1)内壁固定连接,所述套杆(405)的右端通过第一轴承套接在延伸杆b(404)上,所述伞齿轮c(406)固定连接在延伸杆b(404)的下端,所述伞齿轮d(407)固定套设在延伸杆c(408)上,所述伞齿轮c(406)与伞齿轮d(407)啮合连接,所述延伸杆c(408)的两端与滚轮(9)固定连接,所述延伸杆c(408)的两端通过第二轴承与支撑杆b(8)转动连接。3.根据权利要求1所述的一种生物仿生玩具狗,其特征在于:所述传动结构b(6)包括有固定杆(601)、固定板(602)、传动杆a(603)、齿轮(604)、传动杆b(605)、传动杆c(606)、传动杆d(607),所述固定杆(601)的上端与直线电机(5)的输出端固定连接,所述固定杆(601)的下端与固定板(602)固定连接,所述固定板(602)的一端与传动杆a(603)固定连接,所述传动杆a(603)的一端与传动杆b(605)的一端铰接,所述传动杆b(605)远离传动杆a(603)的一端与传动杆c(606)的一端铰接,所述传动杆c(606)远离传动杆b(605)的一端与传动杆d(607)铰接,所述传动杆d(607)远离传动杆c(606)的一端与传动杆a(603)和齿轮(604)铰接,所述传动杆c(606)与支撑杆b(8)固定连接。4.根据权利要求2所述的一种生物仿生玩具狗,其特征在于:所述延伸杆a(401)的左端固定连接有扇叶(12)。5.根据权利要求3所述的一种生物仿生玩具狗,其特征在于:所述固定板(602)的另一端设置有相同结构,且两个所述齿轮(604)啮合连接。6.根据权利要求2所述的一种生物仿生玩具狗,其特征在于:所述套杆(405)的右端与第一轴承的外壁固定连接,所述第一轴承的内壁与延伸杆b(404)固定连接。7.根据权利要求2所述的一种生物仿生玩具狗,其特征在于:所述第二轴承的外壁与支撑杆b(8)固定连接,所述第二轴承内壁与延伸杆c(408)固定连接,所述延伸杆c(408)的两端与滚轮(9)上开设的圆孔内壁固定连接。
技术总结
本实用新型公开了一种生物仿生玩具狗,包括主体,所述主体内壁固定连接有挡板,所述挡板上固定连接有转动电机,所述转动电机的输出端设置有传动结构A,所述主体内壁固定连接有直线电机,所述直线电机的输出端设置有传动结构B,所述主体外壁固定连接有支撑杆A,所述支撑杆A下端固定连接有支撑杆B,所述支撑杆B下端设置有滚轮,所述主体外壁固定连接有支撑杆C,所述支撑杆C下端通过转轴转动连接有支撑杆D。本实用新型通过传动结构A使得机械狗可以具有动力,同时使得机械狗的扇叶可以转动,增加了机械狗的趣味性,本实用新型通过传动结构B可以使得机械狗的腿跑动起来,使其更加生动。使其更加生动。使其更加生动。
技术研发人员:邢佳佳
受保护的技术使用者:邢佳佳
技术研发日:2021.10.12
技术公布日:2022/5/25
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1